一种基于RTRL的神经网络驾驶员巡航模型
2016-07-04张袅娜刘美艳
张袅娜,刘美艳
(长春工业大学 电气与电子工程学院,吉林 长春 130012)
一种基于RTRL的神经网络驾驶员巡航模型
张袅娜,刘美艳
(长春工业大学 电气与电子工程学院,吉林 长春130012)
摘要针对大多数巡航模型未能充分考虑驾驶员的行为特性,文中设计了以实时递归学习算法的神经网络为核心的驾驶员巡航模型。该模型选取前车车速、本车车速、前车加速度和安全车间距共4个参数作为模型输入,以驾驶员控制自车所期望的加速度值为输出,通过真实环境下的巡航实验获取数据样本对RTRL的神经网络进行训练,并对该模型进行仿真验证。仿真实验结果表明,本车期望加速度的预测值与实际真实值基本一致,误差控制在0.05以内,说明该模型能较准确的模拟驾驶员的巡航行为。
关键词RTRL;驾驶员模型;神经网络;巡航
汽车自适应巡航控制(ACC)是先进驾驶员辅助系统[1],同时也是汽车智能化技术的重要代表。巡航过程中驾驶员的行为特性关系到交通效率、道路安全等方面的诸多问题,因而越来越多的控制理论和方法被应用到驾驶员特性分析和建模中[2-4]。目前国内外在相关研究中,大多数是以运动学方程或是经验公式的形式建立数学模型,例如线性模型[5]、GHR模型[6],但对一个优良性能的汽车ACC系统,必须考虑到真实驾驶员的接受程度,也就是控制特性应与熟练的驾驶员操作行为基本一致。因此,从驾驶员操纵行为特性分析的角度出发,建立一种新型驾驶员巡航模型是必要的[7]。
实时递归学习算法(RTRL)在处理复杂非线性问题上具有一定优势,同时具备较好的对样本数据不断学习的能力。因此,将实时递归学习算法的神经网络应用到驾驶员巡航模型中,能更为精确地模拟人的驾驶行为特性,提高车辆巡航模型的性能。
1驾驶员巡航模型
驾驶员巡航模型描述了驾驶员对汽车速度的综合控制行为,模型分为人机交互界面、信息感知与RTRL神经网络3个模块[8-9],如图1所示。其工作过程如下:首先驾驶员判断前方一定范围内是否存在行驶车辆,若存在,则在本车接近前方车辆时开启ACC系统,根据雷达、摄像头和通讯等感知模块得到前车车速、本车车速、前车加速度、安全车间距4参数,输入到RTRL神经网络中,输出驾驶员控制自车所期望的加速度。然后结合车辆的动力学模型,执行器根据控制校正环节给出节气门开度进行恰当的动作,最终实现车辆巡航模型的闭环控制。

图1 驾驶员行为特性模型
2基于RTRL的神经网络设计
人工神经网络是一种应用类似于大脑神经突触联接的结构进行信息处理的数学模型,它能根据不同的外部条件使算法具有适应性,是解决非线性系统问题的有效手段,同时该模型又具备学习功能,被广泛应用于自适应控制领域[10]。
实时递归学习算法是一种用于训练局部反馈网络的学习算法[11]。该网络共有X个单元,Y个外加输入,用s(n)表示n时刻Y维数输入向量p(n),l(n+1)为下一刻的X维输出向量。l(n)与s(n)联合起来成为X+Y维的总输入向量p(n);A表示外加输入的集合;B表示输入中有输出来的集合,如下所示
(1)
网络包含一个联合的输入层和一个处理层。以X=2,Y=4的情况为例,网络共有XY个前向连接和Y2个反馈连接。其中,Y个是自反馈连接,用ω代表权矩阵。
n时刻单元j的净输入为
(2)
下一时刻j的输出为
lj(n+1)=φ[vj(n)]
(3)
式中,j指B单元中所包含的所有元素的下标。下面结合梯度下降法推导出学习算法,用qj(n)表示n时刻单元j的实际输出;C(n)代表有外加实际输出的单元集合,计算单元中其他单元为隐单元,定义N维误差向量e(n)中第j个元素为ej(n)=qj(n)-lj(n),定义n时刻的瞬间误差平方和为
(4)
为使网络能实时学习,采用梯度向量法进行网络权值的更新,当j=k,i=l时,对某一特定权ωkl(n),其在n时刻的增量为
(5)
由于只有当j=k,j=l,∂ωji(n)/∂ωkl(n)=1因此∂vj(n)/∂ωkl(n)改写为

(6)

(7)
更新权值为
ωkl(n+1)=ωkl(n)+Δωkl(n)
(8)
本文选取4个变量作为RTRL神经网络的输入,分别是前车车速、本车车速、前车加速度和安全车间距,1个变量作为输出,是驾驶员控制自车所期望的加速度,因此选取RTRL网络结构为i=4,j=6,则权值ω∈R(4+6)×6。
3仿真实验
训练样本的选择很重要,关系到模型的准确性,文中通过真实环境下的车辆巡航实验获得了稳定巡航状态数据,经过遴选,最后选择具有代表性的100 组数据作为训练样本。经过RTRL神经网络的调试并设置网络的最终误差指标为 ,同时遴选出100组数据,对网络进行测试,验证RTRL神经网络模型的准确性。后车期望加速度的仿真结果如图2所示,可看出模型计算出的驾驶员控制自车的实际加速度与所期望加速度基本吻合,预测结果接近真值。测试误差如图3所示,由图3可见误差在实际值上下0.05范围内浮动,说明该模型有效地模拟了驾驶员的加速度控制特性。

图2 RTRL网络预测与真实值
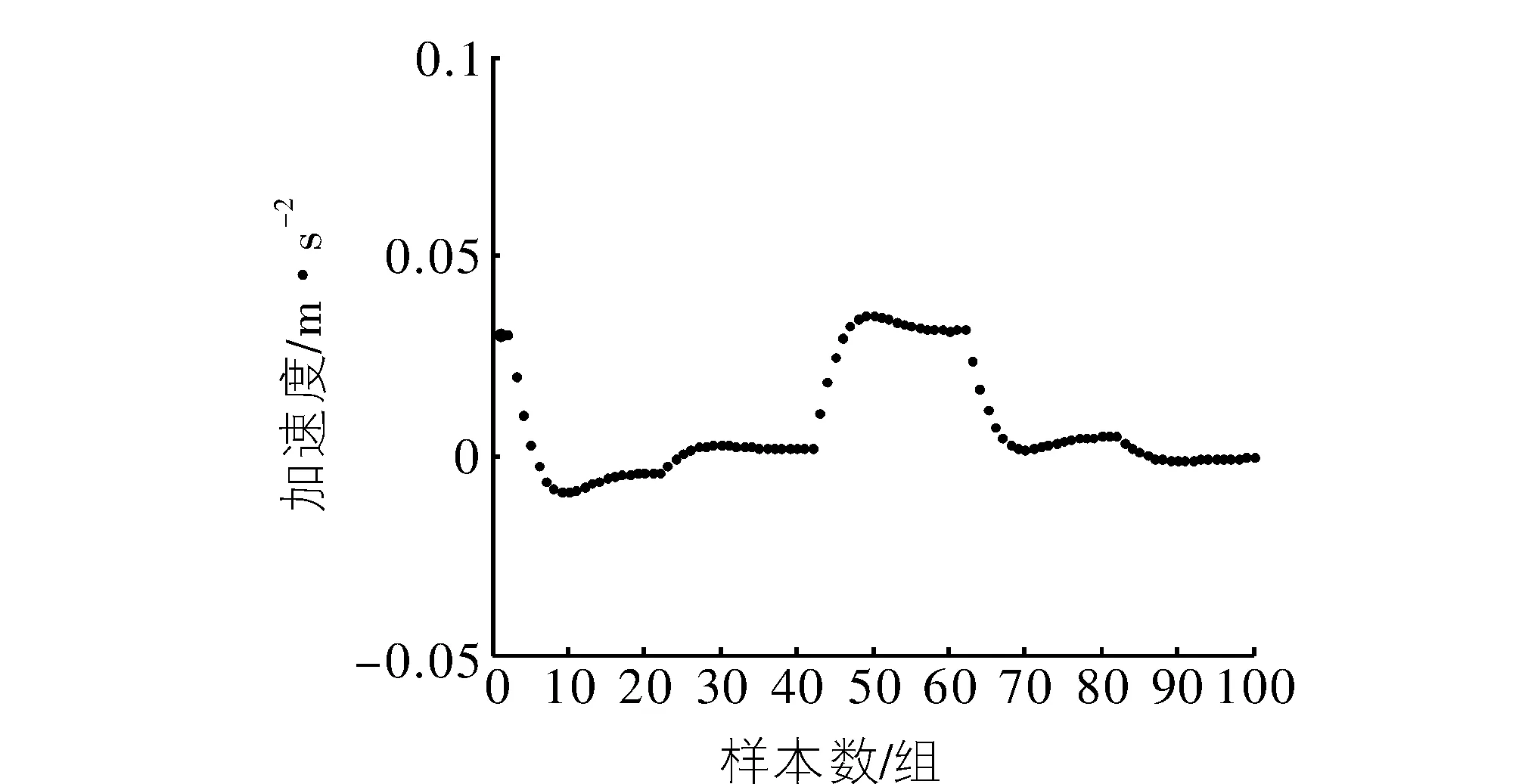
图3 RTRL测试误差
4结束语
仿真实验验证了该网络模型具有模拟驾驶员巡航行为的能力,可准确快速地学习驾驶员的跟随前车行驶特性,且对前车加速或减速具有良好的适用性,当前车变化时能精准快速地控制驾驶。由于汽车智能驾驶系统理论研究上的共同性,以上研究结果也可应用在其他汽车智能系统的研究中。
参考文献
[1]Brackstone M.Car-following:a historical review[J].Transportation Research Part F:Traffic Psychology and Behaviour,1999,2(4):181-196.
[2]李升波,李克强,王建强,等.非奇异快速的终端滑模控制方法及其跟车控制应用[J].控制理论与应用,2010,27(5):543-550.
[3]李克强,陈涛,罗禹贡,等.智能环境友好型车辆—概念、体系结构及工程实现[J].汽车工程,2010,32(9):743-748.
[4]罗禹贡,陈涛,周磊,等.奔腾智能混合动力电动轿车自适应巡航控制系统[J].机械工程学报,2010,46(6):2-7.
[5]Gipps P G.A behavioral car following model for computer simulation[J].Transportation Research B, 1981,15(2):105 -111.
[6]Gazis D C,Herman R,Rothery R W.Nonlinear follow the leader models of traffic flow[J].Operations Research,1961,9(4):545-567.
[7]张磊,李升波,王建强,等.基于神经网络方法的集成式驾驶员跟车模型[J].清华大学学报:自然科学版,2008,48 (11):1985-1988,1992.
[8]高振海,吴涛,尤洋.基于粒子群算法的汽车自适应巡航控制器设计[J].农业机械学报,2013,44(12):12-16.
[9]管欣,王景武,高振海.基于最优预瞄加速度决策的汽车自适应巡航控制系统[J].吉林大学学报:工学版,2004,34(2):189-193.
[10]张红军.一种新的前馈神经网络训练算法及其在控制中的应用[D].大连:大连理工大学,2002.
[11]阎平凡,张长水.人工神经网络与模拟进化计算[M].北京:清华大学出版社,2000.
A Driver Car-Cruising Model Based on RTRL Neural Network
ZHANG Niaona,LIU Meiyan
(Electronic and Electrical Engineering Institute ,Changchun University of Technology, Changchun 130012, China)
AbstractMost car-cruising model could not give full consideration to the driver’s behavior characteristic, this paper designed with real-time recursion learning (RTRL) algorithm of neural network as the core of the driver model of the cruise. This model chooses four parameters as inputs, including the speed and acceleration of preceding vehicle, the following vehicle speed and the safety distance between two vehicles, meanwhile, the desired acceleration which driver controls cruise car is chosen as the output of model. Through cruise experiments under real environment, data samples used for training RTRL neural network are obtained, the model is verified by simulation. Simulation experimental results show that the predictive value of expected acceleration is consistent with the actual true value, error is controlled within 0.05 , it also shows that the model can accurately simulate the behavior of the driver-cruising.
KeywordsRTRL;driver model;neural network;cruise
收稿日期:2015-10-14
基金项目:国家重点基础研究发展计划基金资助项目(973 计划,2011CB711205);国家高技术研究发展计划基金资助项目(863 计划,2011AA11A221);吉林省科技支撑计划重大专项基金资助项目(20126008)
作者简介:张袅娜(1972-),女,教授,硕士生导师。研究方向:复杂控制系统的建模等。刘美艳(1988-),女,硕士研究生。研究方向:混合动力汽车自适应巡航控制。
doi:10.16180/j.cnki.issn1007-7820.2016.06.002
中图分类号TP183;U27
文献标识码A
文章编号1007-7820(2016)06-005-03