基于ARMA模型和狼群算法的陀螺随机漂移建模研究*
2016-06-24来凌红
来凌红
(武警后勤学院 军交运输系,天津 300309)
基于ARMA模型和狼群算法的陀螺随机漂移建模研究*
来凌红
(武警后勤学院 军交运输系,天津 300309)
摘要:光纤陀螺的随机漂移误差是影响惯性导航系统精度的关键因素之一,根据陀螺随机漂移数据的数学模型进行补偿,可有效地提高系统精度。在大量实验的基础上建立陀螺随机漂移的自回归移动平均(ARMA)模型,同时使用长自回归模型法求解模型参数,再对参数进行优化。实验结果证明:经狼群算法优化后的陀螺随机漂移模型更加准确,建模精度相对于传统的时间序列分析法有了较大提高。研究内容对光纤陀螺随机漂移建模精度的提高有较好的参考价值。
关键词:陀螺随机漂移; 自回归移动平均模型; 狼群算法; 参数优化
0引言
自回归移动平均(ARMA)模型是陀螺漂移常用模型之一,具有较高的工程应用价值[1~3]。其中以线性化参数计算为求解方法的长自回归法在该模型建模中应用较为广泛,但其在求解过程中对模型参数的非线性估计转化成对参数的线性估计,因此,在求解过程中存在线性误差,降低模型参数的精度。
文献[4]根据狼群群体智能行为,深入分析狼群捕食行为及其猎物的不同分配方式,人工模拟出游走、召唤、围攻等3种智能行为,继而提出狼群算法(wolfpackalgorithm,WPA)。与蚁群算法、蜂群算法、鱼群算法等算法相比,狼群算法具有较好的全局收敛性与计算鲁棒性,同时可直接用于求解目标函数的优化问题。本文利用狼群算法对光纤陀螺(FOG)随机漂移模型的参数进行优化,其建模效果与长自回归法相比,模型精度有较大幅度的提升。
1陀螺随机漂移模型
光纤陀螺的漂移分为系统性漂移与随机性漂移两种,其中前者通过测试即便对标定进行补偿,精度的提高也是有限的;而后者随时间连续性变化,是量化陀螺漂移误差的重要指标之一,同时对惯性导航系统的精度有较大的影响[5~7]。因此,建立尽可能精确的陀螺随机漂移模型,对其工作状态进行估计后进行补偿,可有效降低光纤陀螺随机漂移对惯性导航系统精度的影响。
1.1ARMA模型
陀螺随机漂移模型通常使用ARMA(n,m)模型,具体表达式为
(1)
式(1)反映了响应数据序列xt与历史输入值xt-k的对应关系。等式的左边是自回归差分多项式AR模型,其阶次为n;右边是滑动平均差分多项式MA模型,其阶次为m。ak,bh分别表示待识别的自回归系数与滑动均值系数,eh为残差,{eh}序列为白噪声激励,同时,当k=0时,令a0=b0=1。
ARMA(n,m)模型要求样本数据满足正态、平稳与零均值的条件,故模型建立前要对数据序列进行上述验证。对不符合条件的时间序列进行零均值化与差分处理使其满足上述要求,然后利用时间序列分析法进行模型的拟合求解。
1.2长自回归模型计算残差
长自回归法的基本原理:当对同一个随机过程进行分析时,同一观测时序{xt}建立的ARMA(n,m)模型、AR(n)模型和MA(m)模型都是等价的数学模型,三者具有相等的传递函数,而且在同一时刻的残差相等。根据这一基本原则,先对AR(n)模型参数进行求解,再根据传递函数相等的关系估计出ARMA(n,m)模型的参数。
根据上述思路,本文使用最小二乘估计法求解AR(n)模型参数,由多元回归理论可知,参数ak矩阵的最小二乘估计如下
(2)
式中
y=[xn+1xn+2…xN]
(3)
ak=[a1a2…an]
(4)
(5)
ARAM模型参数的估计,使用长自回归模型法。参数ak矩阵的最小二乘估计为
ak=-bnIn-m-…-b2In-2-b1In-1+In
(6)
先估计出AR模型,再通过传递函数相等的关系对ARMA模型的参数ak与bh进行求解。计算关于ak的线性方程组
(7)
关于bh的线性方程组
(8)
2狼群算法
狼群算法以人工狼为主体,使用基于不同职责分工与自下而上的合作式搜索方法求解最优化问题。基本思路:随机产生N匹人工狼,随机分布在待优化参数的可行域内。选取最优人工狼为头狼,部分探狼执行随机游走行为,同时判断感知到的猎物的气味yi。当yi≥ylead时,则头狼发出召唤行为,周围的狼听到头狼的嚎叫后以较大的步长朝头狼所在的位置奔袭,对猎物进行围攻。最后狼群按照“胜者为王”的头狼产生机制对头狼所在位置进行更新,当满足终止条件时,输出头狼位置,即优化问题的最优解。WPA算法流程图如图1。
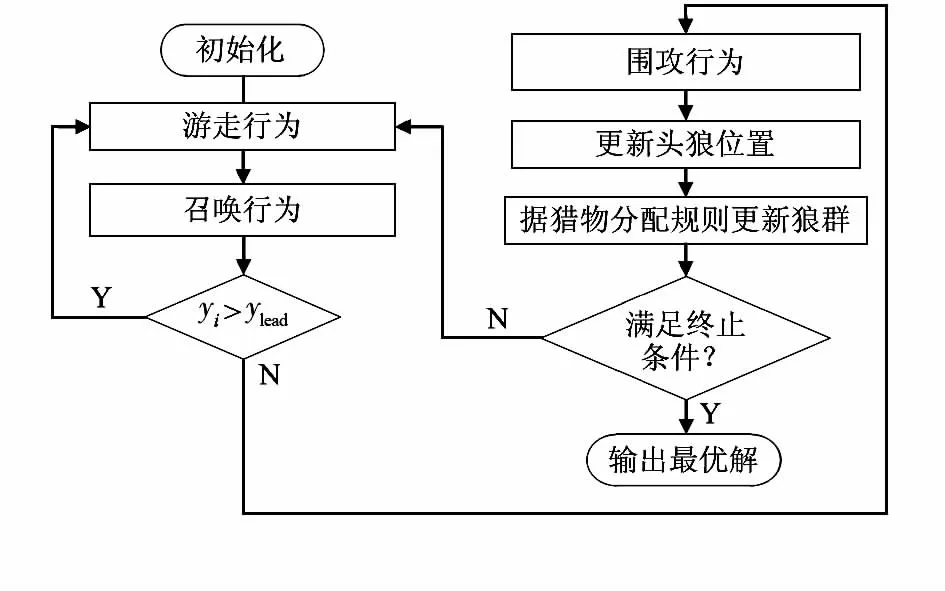
图1 狼群算法流程图Fig 1 Flow chart of WPA
3陀螺随机漂移的狼群算法建模
首先通过长自回归法求解出ARMA模型参数,然后使用狼群算法对模型参数进行优化,具体步骤如下:
1)设置人工狼的个数N,最大迭代次数M,距离判定因子w=500,更新比例因子β=6。


4)选取最优人工狼为头狼,除头狼外最佳位置的S匹人工狼为探狼,按照式(9)进行游走行为
(9)
若某只探狼侦查到猎物气味浓度yi大于头狼感知的浓度ylead,转步骤(5)。
5)人工猛狼根据式(10)向猎物奔袭
(10)
当猛狼感知的猎物气味浓度yi≤ylesd时,则yi>ylead,代头狼发起召唤行为;否则,继续奔袭,转步骤(6)。
6)按式(11)对参与围攻行为的人工狼位置进行更新,同时发起围攻行为
(11)
按“胜者为王”的头狼产生机制,对头狼位置进行更新,转步骤(7)。
7)判断是否达到目标函数要求的优化精度或最大迭代次数,若是,输出头狼位置,也就是问题的最优解;否则,转步骤(4),继续循环。
4模型求解与结果分析
4.1数据消噪预处理
陀螺随机漂移的小波消噪与预处理方法利用陀螺漂移数据进行建模时,首先要对数据进行消噪和预处理。提高建模数据的有效性,以获取平稳、正态、零均值的序列,保证样本数据的准确性[8]。建模所用的数据为国外进口光纤陀螺室温下的静态输出数据,采样频率为200 Hz,测试时间10 min,获取测量数据列{xt}。前6 min数据作为建模基础数据,后4 min数据用于模型检验。数据平稳化处理的步骤如下:
1) 首先进行剔点、平滑处理。实际测得FOG漂移序列一般为非平稳序列,因此,剔除异常点后必须进行平稳化处理,同时去除趋势项。
2) 如果去除趋势项后的序列仍为非平稳时间序列,则应进行差分处理,直至获取平稳时间序列,一般情况下至少进行二阶差分处理。
3) 经过上述处理后的时间序列{xt}作为预测模型的训练与测试样本,如图2。

图2 陀螺实测漂移Fig 2 Actually measured drift of FOG
4.2模型建模结果
长自回归建模结果ARMA(n,m)模型
x(t)-0.286 0x(t-1)-0.095 6x(t-2)=
e(t)+0.881 5e(t-1).
(12)
模型仿真漂移预测数据与实测数据对比图如图3。

图3 长自回归法预测漂移与陀螺实测漂移Fig 3 Predicted drift by long AR method and actually measured drifts by gyro



图4 狼群算法迭代曲线Fig 4 Iterative curve of WPA
由上图分析可知,约经36次迭代后,拟合残差的方差收敛到最优,同时经参数优化后的ARMA(2,1)模型
x(t)-1.462 8x(t-1)+0.596 3x(t-2)=
e(t)-0.540 6e(t-1).
(13)
模型仿真漂移预测数据与实测数据对比图如图5。

图5 优化模型预测漂移与陀螺实测漂移Fig 5 Optimized model predicted drift and actually measured drift by gyro
经上述结果分析,经狼群算法优化后的ARMA(n,m)模型与使用长自回归模型求解的ARMA(n,m)模型相比,e(t)序列的方差减小11.62 %。
5结论
本文首先用传统的长自回归模型法建立光纤陀螺随机漂移的ARMA(n,m)模型,然后通过狼群算法对该模型参数进行优化。实验结果显示:优化后的模型减小了长自回
归模型法所带来的非线性误差。本方法对抑制陀螺随机漂移误差具有较好的参考价值。
参考文献:
[1]Salarieh H,Alasty A.Chaos synchro nization of nonlinear gyros in presence of stochastic excitation via sliding mode control [J].Journal of Sound and Vibration,2008,313(3-5):760-771.
[2]Xiong Jian,Liu Jianye,Lai Jizhou,et al.Identification approach for gyroscope AEIMA model based on Gaussian particle fil-ter[J].Journal of Chinese Inertial Technology,2010,18(4):493-497.
[3]Hasan M K,Hossain N M,Naylor P A.Autocorrelation model based identification method for ARMA system in noise[J].IEE Proc Vision Image Signal Process,2005,152(5):520-526.
[4]吴虎胜,张凤鸣,吴庐山.一种新的群体智能算法——狼群算法[J].系统工程与电子技术,2013,35(11):2430-2438.
[5]Kaderli A,Kayhan A S.Spectral estimation of ARMA processes using ARMA-cepstum recursion[J].IEEE Signal Processing Letters,2000,7(9):259-261.
[6]翟恒昂,朱家海,吴训忠,等.基于小生境蚁群算法的陀螺随机漂移建模方法研究[J].计算机测量与控制,2013,21(5):1327-1329.
[7]杨庆辉,杜红英乙,陈雄,等.微机电陀螺随机漂移建模与卡尔曼滤波[J].计算机仿真,2015,32(3):68-72.
[8]孔庆鹏,高爽,林铁,等.基于ANF的激光陀螺消噪处理研究[J].传感器与微系统,2009,28(1):18-21.
ResearchongyroscoperandomdriftmodelingbasedonARMAmodelandwolfpackalgorithm*
LAILing-hong
(DepartmentofMilitaryTransportation,LogisticsUniversityofPeople’sArmedPoliceForce,Tianjin300309,China)
Abstract:Random drift error of fiber-optic gyroscope(FOG) is one of the key factors that affect precision of inertial navigation system(INS),and precision of INS can be effectively improved by compensating according to math model for datas of FOG random drift.Auto regressive moving average(ARMA) model for gyro random drift is established on the basis of large numbers of experiments,meanwhile,method of long auto regressive model is used to solve model parameters,and optimize parameters.Experimental results prove that the FOG random drift model optimized by wolf pack algorithm(WPA) is more accurate.Compared with traditional method of time series analysis,modeling precision is increased greatly.The method has a better reference value for improving precision of FOG random drift modeling.
Key words:gyroscope random drift; ARMA model; wolf pack algorithm(WPA); parameter optimization
DOI:10.13873/J.1000—9787(2016)04—0056—03
收稿日期:2015—08—31
*基金项目:联合实验室开放基金资助项目(FOM2015OF015);武警总部后勤部课题资助项目
中图分类号:TP 274; V 241
文献标识码:A
文章编号:1000—9787(2016)04—0056—03
作者简介:
来凌红(1972-),男,湖北公安人,硕士,副教授,主要研究领域为机电一体化、电气系统。
