微悬臂振动干涉测量非正交信号的处理算法
2016-06-23王选择孔德靖翟中生
王选择 孔德靖 翟中生
湖北工业大学, 武汉,430068
微悬臂振动干涉测量非正交信号的处理算法
王选择孔德靖翟中生
湖北工业大学, 武汉,430068
摘要:设计了干涉条纹形状对悬臂角度变化不敏感的干涉光路系统,针对实际干涉条纹光电转换信号的特点,提出了对难以保证正交化的两路信号进行实时椭圆拟合的方法。应用椭圆拟合及换算参数的结果,推导了干涉条纹相位变化的理论公式。最后,根据相位量与振动位移量的关系,以及振动位移连续性的特点,通过直接解包裹的衔接算法,得到了最终振动位移量。实验表明,该方法在保证足够采样频率的条件下,无需额外硬件计数电路,就能完成微悬臂振动位移的干涉量级精度的测量。
关键词:测量;微悬臂;相位差;椭圆拟合;相位解包裹
0引言
微电子机械系统(MEMS)技术是建立在微米/纳米技术基础上的21世纪前沿技术[1-2]。其中悬臂结构是MEMS器件[3]中常用的一种结构,利用悬臂振动进行被测物质的定量分析的原理可用于构建以微悬臂梁为传感元件的传感器,在汽车、航空航天、生物、化学、环保、军事等领域有着广泛的应用前景[4-5]。而激光干涉法[6]利用光波干涉测量悬臂梁的变形量[7],是一种高精度无需标定的非接触测量方法。干涉条纹一般采用象限光电管[8]或CCD接收。
对干涉信号采用合适的接收与处理方法,有利于提高干涉测量的精度。传统的对干涉条纹采用象限光电接收的方法,一般要求两组正交的光电转换信号[9-11],才能达到辨向细分的高精度测量目的。然而,实际测量系统中,干涉条纹形状由参考光与测量光方位角共同决定,传统激光准直光路中,任何一路光束方向的毫弧级变化,都将导致条纹形状较大的变化[12-13],因此,这种光路在测量过程中,干涉条纹形状受悬臂角度变化的影响大,不适合悬臂的测量。另一方面,由于加工和安装误差等因素的影响,测量系统参考光与测量光的初始夹角,无法保证测量系统获取理想的干涉条纹形状,需要相应调节光电管的方位,使两路信号满足正交性。
针对上述问题,笔者首先设计了一种干涉条纹形状对悬臂角度变化不敏感的干涉光路,该干涉光路适合微悬臂短行程的测量。其次,为了减少对测量系统调整的工作量,增大系统对安装误差的冗余度,提出利用软件算法对非正交干涉信号进行处理的方法,弥补正交条件[14]的不足。为此,在对两路光电接收干涉条纹信号进行数学建模分析的基础上,利用实时椭圆拟合方法[15-16]对两路信号进行拟合。根据椭圆拟合与参数换算后得到的幅值、直流偏置和相位差的结果,推导了条纹运动相位变化的相关算法。最后,根据相位与振动位移的关系,以及振动位移变化连续性的特点,通过直接解包裹的衔接算法[17-21],得到了完整的悬臂振动位移。
1悬臂干涉测量系统
测量系统的原理如图1所示,半导体激光器发出的激光,通过聚焦棱镜后,入射到分光棱镜上,然后分成两束光,分别聚焦在反射镜和悬臂梁上。经过反射镜和悬臂梁反射后,再次投射到分光棱镜上,部分光重合后在探测器上形成干涉条纹。

图1 测量系统结构示意图
这种测量系统的特点在于聚焦干涉,适合短行程的干涉测量。其优点在于一方面使光斑能够聚焦到微小结构的悬臂上,另一方面,系统产生的干涉条纹在探测器上得到自然的放大,且微悬臂振动产生的微小角度变化对条纹形状变化的影响可忽略[10,22]。
系统采用图2所示的二象限探测器对干涉条纹信号进行光电转换。只要探测器与条纹方向存在一个小的偏角[11],两路干涉信号之间就存在一个恒定的相位差。
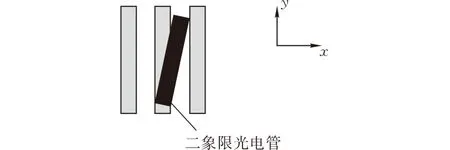
图2 光电管相对条纹位置示意图
2干涉信号数学建模与算法设计
干涉条纹形状由参考光与测量光两路光束夹角决定[22]。由于加工和安装误差的影响,以及激光器光斑光强分布影响,对于每个测量仪器个体,干涉条纹形状难以达到均匀、一致的要求。这就致使象限探测器接收的干涉条纹信号,在实际测量系统中无法满足正交化的要求。因此,非正交化条纹信号的处理显得非常必要。
2.1干涉信号的数学建模
虽然干涉场中每一点的相位与所处干涉条纹位置有关,但干涉场中每点相位的变化和悬臂位移之间均满足如下关系:
(1)
式中,θ为干涉相位变化量;s为悬臂位移量;λ为激光波长。
利用图2中二象限光电管接收干涉条纹的方法,在保证光电管与干涉条纹之间有一个小倾角的条件下[9],两路光电转换信号之间有一个相差,数学表达式满足如下形式:
(2)
式中,x、y为两路转换信号;A、B分别为两路信号的幅值,且A、B>0;C1、C2分别为两路信号的偏置量;φ为两路信号的相位差,且当φ=π/2时,x、y为两路正交信号。
图3显示了在实际测量悬臂振动过程中,随时间变化,同时采集的两路干涉信号曲线。实线代表x路信号,虚线代表y路信号;横坐标为两路信号的采样点序号,纵坐标为12位AD采样电压的数字量。信号的采样周期为2000Hz,图中选取其中的400个采样点。
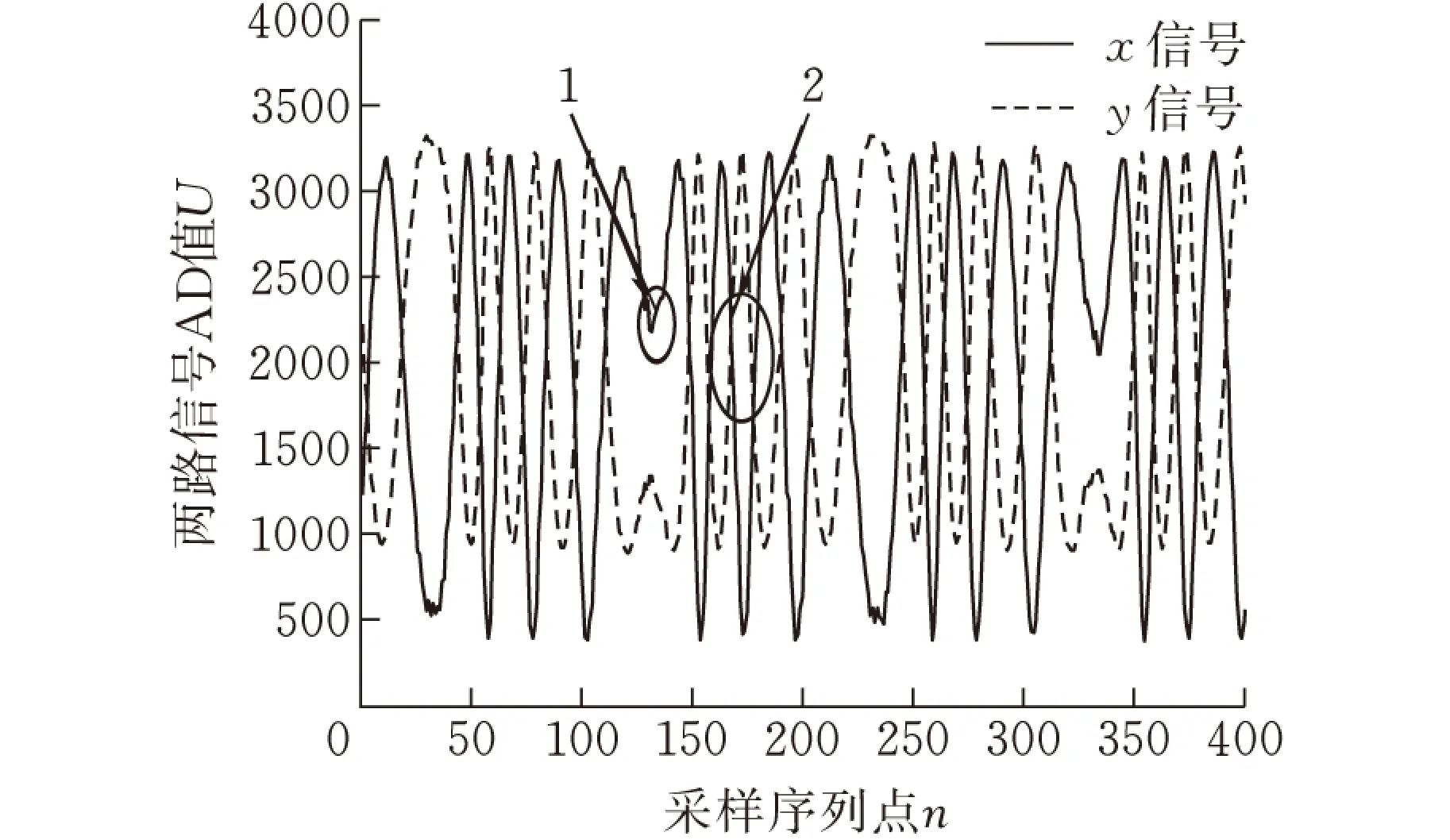
1.悬臂运动至顶峰或者峰谷位置,方向翻折2.悬臂运动到平衡位置,速度最大,信号频率最大图3 x、y两路干涉信号曲线
图3的信号曲线反映了悬臂的简谐运动状态。其中信号频率高的地方,相位角θ变化快,此时悬臂处于振动平衡位置附近时刻,振动速度大;信号频率低的地方,相位角θ变化缓慢,此时悬臂处于振动峰点时刻,振动速度小。从图3中还可以看出,所采集的悬臂振动变化接近4个周期。
图4给出了两路信号的Lissajous图,曲线呈斜椭圆形,其横坐标和纵坐标分别是两路信号的12位AD转换量。同时椭圆线越细,表明干涉条纹光电接收信噪比越高。
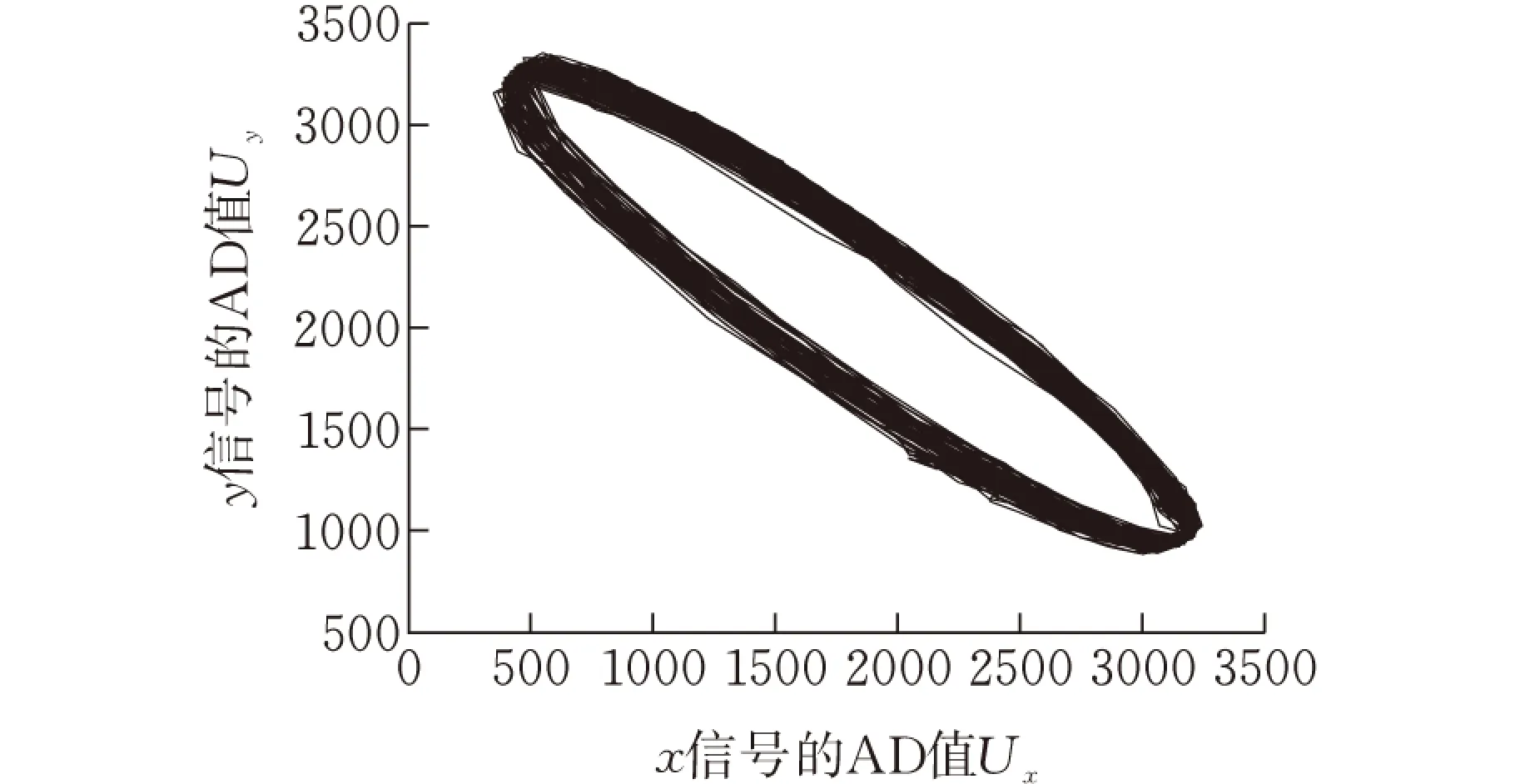
图4 两信号的Lissajous图
2.2椭圆拟合对信号的处理
如何根据两路干涉信号x、y的值求取悬臂位移s,是干涉信号处理的关键。考虑θ正比于s,因此首先计算θ值。根据式(2),要得到θ值就必须事先得到A、B、C1、C2和φ的值。为此,在对式(2)消除参数θ后,可以推出两路干涉信号满足椭圆关系。把椭圆参数方程转换为相应的椭圆直角坐标方程[22],形式如下:
y2+axy+bx2+cy+dx+e=0
(3)
考虑到采样的x、y两路干涉信号具有足够的采样点,在已知x、y的条件下,式(3)亦可以写成:
(4)
其中i=1,2,…,n, 这里n为采样点数;xi、yi为采样信号序列值。
式(4)显然是一组多元线性方程组,利用满足最小二乘的多元线性回归方法,得到系数a、b、c、d、e。其中这些回归系数与参数方程的参数A、B、C1、C2和φ之间满足如下式所示的换算关系[15]:
(5)
值得注意的是,为了使拟合的效果达到最佳,两路信号的Lissajous图应至少具有构成一个封闭椭圆的数据量。
2.3相位的计算
在前面拟合与参数换算求解得A、B、C1、C2和φ后,对式(2)中三角函数进行推导计算,得到相位θ的计算表达式:
(6)
式(6)中,在代入每一个采样序列点xi、yi的基础上,可以算出相应的sinθi和cosθi,然后应用双参数反正切函数可以求取θi,这里θi为反正切相位序列值,其中的前400个相位点如图5所示。

图5 双参数反正切相位
由于反正切计算的相位θi是处于(-π,π]之间的包裹相位,并不是真正反映悬臂振动位移的绝对相位量,而代表悬臂实际振动的绝对干涉相位远远超出这个限制范围,因此,在相位超过(-π,π]区间时会发生跳跃,使相位出现不连续的现象,如图5所示。需要进一步地解包裹衔接算法才能完成对悬臂振动绝对相位的计算。
3相位解包裹算法设计及实验
3.1解包裹算法
相位解包裹的引入是由于在求相位的过程中引入了反正切函数或者反正弦函数,计算所得到的相位被包裹在(-π,π]之间,为了得到真实的相位分布,需要对这些包裹相位作进一步的处理,这一处理过程称为“相位解包”。实际干涉相位变化范围大于一个周期2π,这样必然在-π~π或π~-π之间存在跃变。解包裹即找出这些跃变点,将被截断(包裹)的相位连接起来,以得到真实的相位信息[21]。
基于此,算法思想是对双参数反正切函数得到的相位进行相邻点相减,判断相邻点相位差。当相邻点相位差大于π或小于-π时,认为是跃变点,利用软件对跳变点相应增加或者减少2π。
具体方法采用如下三个原则:
(7)
其中,Ωi为第i点解包后的绝对相位,且满足Ω1=θ1。
3.2悬臂振动位移的复原实验
利用上述的计算过程,对正弦激励下的悬臂振动位移进行实测实验。图6示出了解包裹计算后的绝对相位Ωi,它与悬臂振动位移量成正比。从图6中可以看出:解包裹后的相位变化呈现明显的正弦形,相邻相位之间不再有跳变的现象。

图6 解包裹后的相位
考虑到悬臂振动位移与干涉相位之间满足如下关系:
(8)
代入激光波长λ=650nm,经计算可得到振动位移量。
图7显示了微悬臂位移10个峰值点局部区域与10个谷值点局部区域对应的计算结果。

图7 微悬臂位移峰谷放大图
悬臂振动位移的峰谷值约为1200nm,相邻顶峰之间的差距最大约为12nm,相当于最大相位误差达到0.23rad。结果表明测量的精度很高。
4结论
在设计基于干涉条纹形状对悬臂角度变化不敏感的干涉光路基础上,提出了对难以保证正交化的两路干涉信号进行实时椭圆拟合的方法。根据椭圆拟合与参数换算结果推导出光电信号非正交条件下,悬臂干涉相位变化的计算方法,最后通过解包裹衔接算法还原悬臂振动位移。由于激光干涉仪位移测量以激光波长为标准,在一般工业测量中,不需要对测量系统进行专门的校准验证,测量结果可信度高,很容易达到纳米级精度。在应用该测量方法对某种微悬臂振动位移的测量实验中,在振动峰峰值为1200nm的条件下,比较了其中10个振动周期内振动位移的幅度,发现峰峰间误差及谷谷间误差均小于12nm。
参考文献:
[1]IshikawaI,SawadaR,HigurashiE,etal.IntegratedMicro-displacementSensorthatMeasuresTiltingAngleandLinearMovementofanExternalMirror[J].SensorsandActuatorsA:Physical, 2007, 138(2):269-275.
[2]HerfstRW,KlopWA,EschenM,etal.SystematicCharacterizationofOpticalBeamDeflectionMeasurementSystemforMicroandNanomechanicalSystems[J].Measurement, 2014, 56(10):104-116.
[3]黄玉波,栗大超,胡小唐,等.测量微悬臂梁曲率的相移显微干涉法[J].光学精密工程,2007,15(9):1398-1402.
HuangYubo,LiDachao,HuXiaotangetal.CurvatureMeasurementofMicroCantileverBasedonPhase-steppingMicroscopicInterferometry[J].OpticsandPrecisionEngineering,2007,15(9):1398-1402.
[4]唐洁.压电微悬臂梁传感技术的研究[D].天津:天津大学,2005.
[5]周雄图,张永爱,郭太良.SiO2微悬臂梁制备及其高阶谐振的传感器研究[J].光电子激光,2013(11):2055-2059.ZhouXiongtu,ZhangYongai,GuoTailiang.FabricationofSiO2Micro-cantileveranditsSensorApplicationBasedonHigherResonanceModes[J].JournalofOptoelectronics·Laser,2013(11):2055-2059.[6]LiLiyan,WangJian,HanChunyang,etal.IntegrationSingle-frequencyLaserInterferometerUsedtoNanometerMeasurement[J].ChineseJournalofLasers,2011,38(4):0408001-1-5.
[7]XiongLiangcai,ZhouQuansheng,YouWu,etal.NewLaserExcitationMethodforModalAnalysisofMicrostructure[J].MechanicalSystemsandSignalProcessing, 2015, 50:227-234.
[8]袁群, 高志山, 李建欣,等. 基于π/4相移平均的多光束干涉相位提取算法[J]. 光学学报,2011,31(11):140-145.
YuanQun,GaoZhishan,LiJianxin,etal.PhaseExtractionAlgorithmsofMulti-beamInterferenceBasedonPhase-shiftingAveraging[J].ActaOpticaSinica,2011,31(11):140-145.
[9]黄强辉,曹益平,张可雄,等.基于四象限探测器检测干涉条纹正交信号[J].强激光和粒子束,2008,20(8):1253-1256.
HuangQianghui,CaoYiping,ZhangKexiong,etal.DetectingOrthogonalSignalsofInterferenceFringesBasedonFourQuadrantDetector[J].HighPowerLaserandParticleBeams,2008,20(8):1253-1256.
[10]周浩,王选择,翟中生,等.基于圆形四象限光电探测器的条纹形状识别方法研究[J].中国激光,2012,39(7):0708002-1-7.
ZhouHao,WangXuanze,ZhaiZhongsheng,etal.ResearchonFringeShapeRecognitionMethodsBasedonCircularFour-quadrantPhotoelectricDetect[J].ChineseJournalofLasers,2012,39(7):0708002-1-7.
[11]黄强辉,曹益平.采用四象限探测器检测干涉条纹正交信号的新方法[J].中国激光,2009,36(5):1166-1170.
HuangQianghui,CaoYiping.NewMethodforDetectingOrthogonalSignalsofLaserInterferenceFringesUsingFour-quadrantDetector[J].ChineseJournalofLasers,2009,36(5):1166-1170.
[12]KakumaS,HoshiiJ,TakahashiN,etal.PrecisionLengthChangeFollowedbyDynamicDetectionoftheLaserFrequencyLockedtoInterferenceFringe[C]//18thCongressoftheInternationalCommissionforOptics.SanFrancisco, 1999:643.
[13]GeZT,TakedaM.High-resolutionTwo-dimensionalAngleMeasurementTechniqueBasedonFringeAnalysis[J].AppliedOptics,2003,42(34):6859-6868.
[14]彭东林,付敏,朱革,等. 一种光强正交调制的新型线性位移传感器研究[J]. 光学学报,2014,34(12):1212007.
PengDonglin,FuMin,ZhuGe,etal.StudyonaNovelLinearDisplacementSensorBasedontheOrthogonalModulatingLightIntensity[J].ActaOpticaSinica, 2014, 34(12): 1212007.
[15]陈家凤,陈海清.基于小波变换的加权最小二乘相位解缠算法[J].光电子激光,2008(4):514-517
ChenJiafeng,ChenHaiqing.WeightedLeastSquaresPhaseUnwrappingAlgorithmBasedonMultiresolutionWaveletTransform[J].JournalofOptoelectronics·Laser,2008(4):514-517.
[16]王选择.正交衍射光栅计量原理及在超精密工作台上的应用[D].武汉:华中科技大学,2004.
[17]涂勇,钟金钢.一种应用于动态数字全息的快速相位解包裹算法[J].光电子激光,2012(1):148-153.
TuYong,ZhongJingang.AMethodforFastPhaseUnwrappinginDynamicDigitalHolography[J].JournalofOptoelectronics·Laser,2012(1):148-153.
[18]李国栋,韦春龙,于瀛洁,等.圆形域干涉图中的相位解包裹[J].光学精密工程,2000,8(5):473-477.
LiGuodong,WeiChunlong,YuYinjie,etal.Phase-unwrappingforInterferogramswithCircleField[J].OpticsandPrecisionEngineering,2000,8(5):473-477.
[19]WangXin,DaFeipeng.PhaseUnwrappingAlgorithmUsingInterlacedFringefor3DShapeMeasurement[J].JournalofOptoelectronics·Laser,2011,22(2):249-255.
[20]朱勇建,李安虎,潘卫清,等.结构光测量中快速相位解包裹算法的讨论[J].光子学报,2009,38(1):184-188.
ZhuYongjian,LiAnhu,PanWeiqing,etal.FastPhase-unwrappingAlgorithmsUsedforStructural-lightMeasurement[J].ActaPhotonicaSinica,2009,38(1):184-188.
[21]卓静一,孔令讲,周建华,等. 一种液晶相控阵中基于迭代的相位恢复算法[J]. 光学学报, 2014, 34(5): 0505001.
ZhuoJingyi,KongLingjiang,ZhouJianhua,etal.AnIteration-basedPhaseRetrievalAlgorithminLiquid-crystalPhasedArray[J].ActaOpticaSinica, 2014, 34(5): 0505001.
[22]王选择,翟中生,钟毓宁,等.应用动态调制与干涉条纹形状测量二维角度[J].光学精密工程,2014,22(2):274-279.
WangXuanze,ZhaiZhongsheng,ZhongYuning,etal.MeasurementofTwo-dimensionalAngleUsingDynamicModulationandInterferenceFringeShape[J].OpticsandPrecisionEngineering,2014,22(2):274-279.
(编辑王艳丽)
AProcessingAlgorithmofNon-orthogonalSignalsforMicro-cantileverVibrationInterferometryMeasurement
WangXuanzeKongDejingZhaiZhongsheng
HubeiUniversityofTechnology,Wuhan,430068
Abstract:This paper designed interference measurement system which the stripe shape was less sensitive to cantilever’s changing angles. Then analysing the characteristics of two-photoelectric receiving interference signals which were difficult to guarantee orthogonalization, a real-time ellipse fitting method was proposed. Using the ellipse fitting method and the conversion results, the theoretical formula of interference fringe phase change could be derived. Finally, according to the relationship between the phase and vibration displacement, and the property of vibration displacement’s continuity, vibration displacement quantity could be obtained by using unwrapping algorithm. The results show that this method can achieve measurement level of interference precision order without additional hardware processing circuit wnder the conditions of the sufficient sampling frequency.
Key words:measurement; micro cantilever; phase-difference; ellipse fitting; phase unwrapping
收稿日期:2015-04-28
基金项目:国家自然科学基金资助项目(51175154, 51275157, 51275158);天津大学精密测试技术及仪器国家重点实验室开放基金资助项目(PIL1209)
中图分类号:TH744.3
DOI:10.3969/j.issn.1004-132X.2016.04.004
作者简介:王选择,男,1971年生.湖北工业大学机械工程学院教授。孔德靖,男,1991年生。湖北工业大学机械工程学院硕士研究生。翟中生,男,1978年生。湖北工业大学机械工程学院副教授、博士。
