一种基于绝对式角编码器的风标式迎角侧滑角传感器的设计与实现
2016-06-23毛仲君张利辉黄少林
杨 帅, 黄 平, 毛仲君, 张利辉, 黄少林
(1. 中国空气动力研究与发展中心 计算空气动力研究所, 四川 绵阳 621000; 2. 总参炮兵训练基地雷达教研室, 河北 张家口 075100)
一种基于绝对式角编码器的风标式迎角侧滑角传感器的设计与实现
杨 帅1,*, 黄 平1, 毛仲君1, 张利辉1, 黄少林2
(1. 中国空气动力研究与发展中心 计算空气动力研究所, 四川 绵阳 621000; 2. 总参炮兵训练基地雷达教研室, 河北 张家口 075100)
设计了一种风标式迎角侧滑角传感器,以满足模型飞行试验中大迎角飞行状态下迎角侧滑角的测量需求。首先对比分析了压差比式传感器与风标式传感器的优缺点,并结合试验需求,选取风标式传感器为设计目标。采用新型绝对式角编码器来测量角度,增加了测量范围、提高了测量精度并能满足恶劣环境条件下的测量需求。采用自平衡式风标,省去了配重,减小了机身气流的影响。风标式传感器由风标机械结构和测量系统组成。通过风洞试验及飞行试验验证,该风标式传感器的迎角测量范围能够达到±90°,并具有结构简单、测量范围大和测量精度高等优点。
大迎角;绝对式角编码器;自平衡式风标;传感器
0 引 言
模型飞行试验是通过飞行器模型在大气中飞行进行空气动力学问题研究的一种模拟飞行试验方法,是空气动力学三大研究手段之一。通过开展模型大迎角飞行试验获取大迎角气动特性和操稳特性,可以有效验证危险边界飞行控制律,为研制具有过失速机动飞行能力的战斗机提供技术支撑。研制一种能够准确测量大迎角飞行气流系参数的传感器,是大迎角飞行试验的关键。
常用的迎角侧滑角传感器有压差比式和风标式。现有的试验模型上采用五孔探针测量常规迎角气流参数,五孔探针即属于压差比式传感器[1]。压差比式传感器主要利用压差比与迎角侧滑角的关系来获取迎角侧滑角信息。压差比式传感器适用于被测角度小、Ma数大的场合。该模型所采用的五孔探针准确测量范围在±30°之间,无法满足大迎角测量需求,而且结构复杂,密封性要求高,还存在研制周期长、造价成本高、易损坏和不易维修等缺点。而风标式传感器主要利用风标跟随飞机周围气流变化来获取迎角侧滑角信息,它具有结构简单、造价成本低、测量范围大和响应比较迅速等优点。与五孔探针相比,风标式传感器不易受空气中的雨、雪、雾和沙尘影响,可靠性更高。
早在20世纪50年代,美国的William Gracey[2]已经对飞机迎角的测量方法进行了总结,详细分析了风标传感器的优缺点。经过几十年的发展,美国的风标传感器已经取得了很大的进步。美国Spaceage Control、 Goodrich 等公司推出了许多风标式迎角传感器产品。美国 A4“天鹰”舰载攻击机、B1轰炸机、F5战斗机、T38 教练机以及 C5、C17、C141 等军用运输机广泛采用了风标式传感器。
国内的风标式传感器最近几年也有很大的发展。汪磊[3]设计的某型迎角侧滑角传感器和吴大卫等人[4]发明的微小型迎角传感器都是风标式传感器,但是这些风标式传感器都是采用电位器角度传感器或者霍尔角度传感器来测量角度,迎角测量范围最大只有±45°。电位器角度传感器是将风标的角度变化通过改变滑动变阻器的电阻值转换为相对应的电压变化,它具有结构简单、价格低廉等优点,但存在测量精度低、测量范围小、寿命短等缺点。霍尔角度传感器是利用霍尔效应原理制成,它具有灵敏度高和体积小等优点,但同时存在互换性差、易受温度变化影响和非线性输出的缺点。
新型的绝对式角编码器[5]解决了这些问题,绝对式角编码器由机械位置决定了每个位置的唯一性,无需记忆,无需寻找参考点,而且不用一直计数,可以随时读取它的位置,因此大大提高了绝对式角编码器的抗干扰特性和数据可靠性。因此,本文基于绝对式角编码器,采用自平衡式风标,设计一种能够对某模型飞机±90°迎角范围进行测量的风标式传感器,并通过风洞试验和飞行试验验证。
1 总体设计
风标式迎角侧滑角传感器主要由风标机械结构和测量系统组成,其工作流程图如图1所示。

图1 风标式传感器工作流程图
当风标中心线与气流方向平行时(即无迎角或侧滑角时),气动力不产生力矩,风标不转动。当模型飞机以某一迎角(或侧滑角)飞行时,由于风标气动力产生力矩,使风标转动消除风标自身的迎角,直到风标中心线与气流方向一致为止,此时风标与机体轴线的夹角与模型飞机的迎角(或侧滑角)相等。风标偏转带动转轴转动,转轴转动的角度由绝对式角编码器直接读取,再通过系统解算,对外输出迎角(或侧滑角)数据,供飞控系统使用。该风标式传感器的迎角测量范围能够达到±90°,测量精度能够达到0.1°,起动速度≤15m/s。
2 结构设计
该风标式迎角侧滑角传感器结构部分由风标组件、轴组件、轴承座和绝对式角编码器等组成。迎角风标由2个风标叶片组成,侧滑角风标由一个风标叶片组成。传感器外形如图2所示。

图2 风标式传感器结构图
现有的迎角(或侧滑角)风标一般为刀片式,风标本身的重量很大,需要在机身内部设置配重进行平衡,从而导致整个产品的重量过大。另外,由于内部配重结构的限制,迎角(或侧滑角)的测量范围很小,一般不超过±30°。由于刀片式风标贴近机身表面,测量的迎角(或侧滑角)会受到飞机表面局部流场的影响,必须使用程序进行补偿。刀片式风标传感器如图3所示。

图3 刀片式风标传感器
本文设计的风标采用新型的自平衡结构。为了满足平衡和降低风标阻力系数,风标叶片采用对称翼型。风标叶片使用密度小的玻璃钢复合材料,风标杆使用密度大的不锈钢材料,通过风标前后使用不同密度材料的结构达到自平衡效果,并且将风标的气动中心调整到旋转轴孔处,因此风标受到的径向力矩很小,适于低速状态下的迎角(或侧滑角)测量。该风标安装在飞机的正前方,并且远离机身表面,受到飞机表面气流的影响小,可以准确输出迎角(或侧滑角)的测量数据,并可大幅增加迎角(或侧滑角)的测量范围。另外,为了保持风标转动时的刚度和强度,防止出现机构变形,引起测量误差,风标转轴采用Φ4mm不锈钢材料制成,并加装轴承座以支撑风标转轴。整个风标传感器安装在机身里面,只有风标叶片露于机身外,如图4所示。
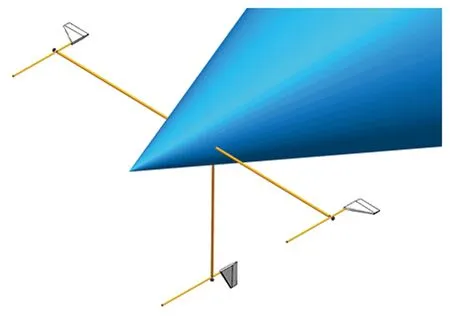
图4 风标式传感器机身安装图
为了保持传感器的测量精度,风标转轴必须保持足够的刚度强度,因此需要对风标转轴进行刚度和强度分析。在一个极限条件下,飞行最大速度为60m/s,空气密度为1.225kg/m3,阻力系数取0.9,风标转轴最大迎风面积为732.3mm2,则施加在风标转轴上的气动力F可根据式(1)计算得出。
对风标转轴进行有限元分析,结果如图5和6所示。在最大设计载荷下,风标转轴的变形引起的位移变化在0.13mm左右,最大应力为14.86MPa,满足设计要求。

图5 风标转轴刚度有限元分析图
风标传感器在机身上的安装位置误差会影响传感器的测量精度,因此需要采取相应措施以减小误差。安装位置误差主要由传感器的加工误差和装配误差引起。通过提高机械加工精度来减小加工误差,通过使用工装夹具来减小装配误差。
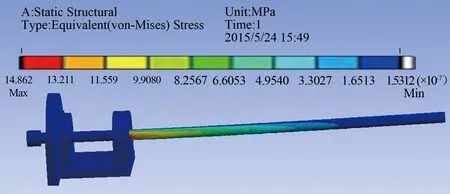
图6 风标转轴强度有限元分析图
3 测量系统设计
风标传感器的测量系统主要是对风标偏转的角度进行采集和数据处理,得到飞机模型的真实迎角和侧滑角数据。风标传感器的测量系统通过嵌入式设计实现,包括角度传感器、数据处理器和存储器等部分,如图7所示。测量系统通过角度传感器采集得到风标的偏转角度,发送给数据处理器。系统解算后一方面通过对外输出迎角侧滑角值,供飞控系统使用,另一方面存储到板载存储器中,便于后续的数据分析。
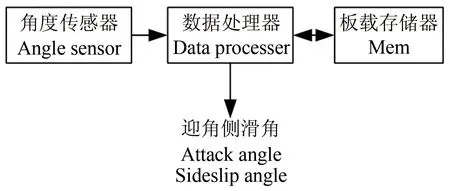
图7 风标式传感器测量系统图
由于测量精度要求高及工作环境苛刻,角度传感器选用的是空心轴单圈绝对式角编码器。它以2个精密的球轴承为基础,适用于恶劣的工作环境。在低速转动环境下具有0.09°的测量精度。绝对式角编码器通过转动过程中测量光电编码盘各道刻线,以获取唯一的编码,再通过编码器常用SSI接口发送给数据处理器[6]。
数据处理器采用Cortex M4芯片处理器。Cortex M4芯片处理器是由ARM专门开发的最新嵌入式处理器,在M3基础上强化了运算能力,新加了浮点、DSP和并行计算等。
4 风洞试验结果分析
由于风标传感器测量结果受到加工装配精度等影响,需要通过风洞校测试验来确定。试验结果技术指标如表1所示,从表中试验数据可见,均达到了技术指标要求。

表1 试验结果技术指标Table 1 Technical indicators of test results
风洞试验结果如图8和9所示,其中,Actual表示风洞机构的实际测量角度,Measure表示风标传感器的测量角度。
由图8和9可知,风标传感器与风洞机构的测量值基本一致。由于试验风洞流场品质不好以及风洞旋转机构存在测量误差,因而风洞机构的测量误差随着机构旋转角增加而增大,实测迎角为90°时的误差为5.2°。而图8中风标传感器测量结果在迎角为90°时的误差约为5°。因此,风标测量值与实际值一致。
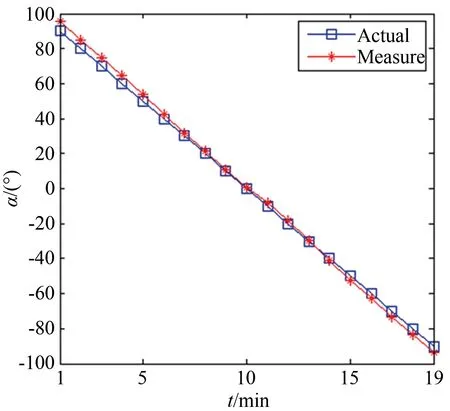
图8 迎角测量结果
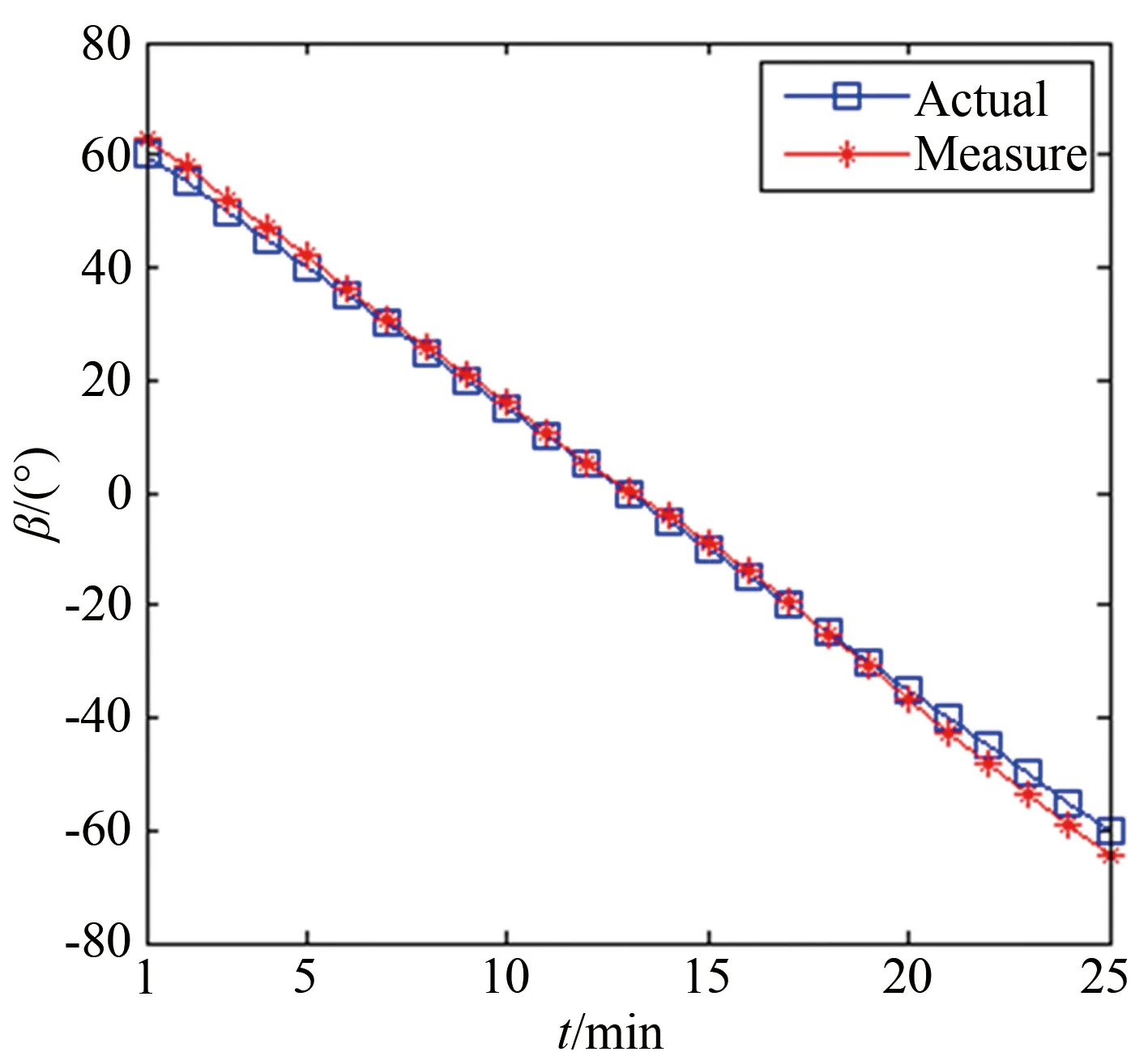
图9 侧滑角测量结果
5 飞行试验结果分析
通过模型飞行试验对设计的风标传感器进行了验证,并与五孔探针的测量结果进行比对。五孔探针进行过风洞试验标定,测量结果准确可靠,但无法测量超过±30°的迎角。
飞行状态下试验结果如图10、11和12所示,其中,AlphaWL表示左风标的迎角测量输出值,AlphaWR表示右风标的迎角测量输出值,AlphaFHP表示五孔探针的迎角测量输出值,BetaW表示下风标的侧滑角测量输出值,BetaFHP表示五孔探针的侧滑角测量输出值。

图10 平飞段迎角变化
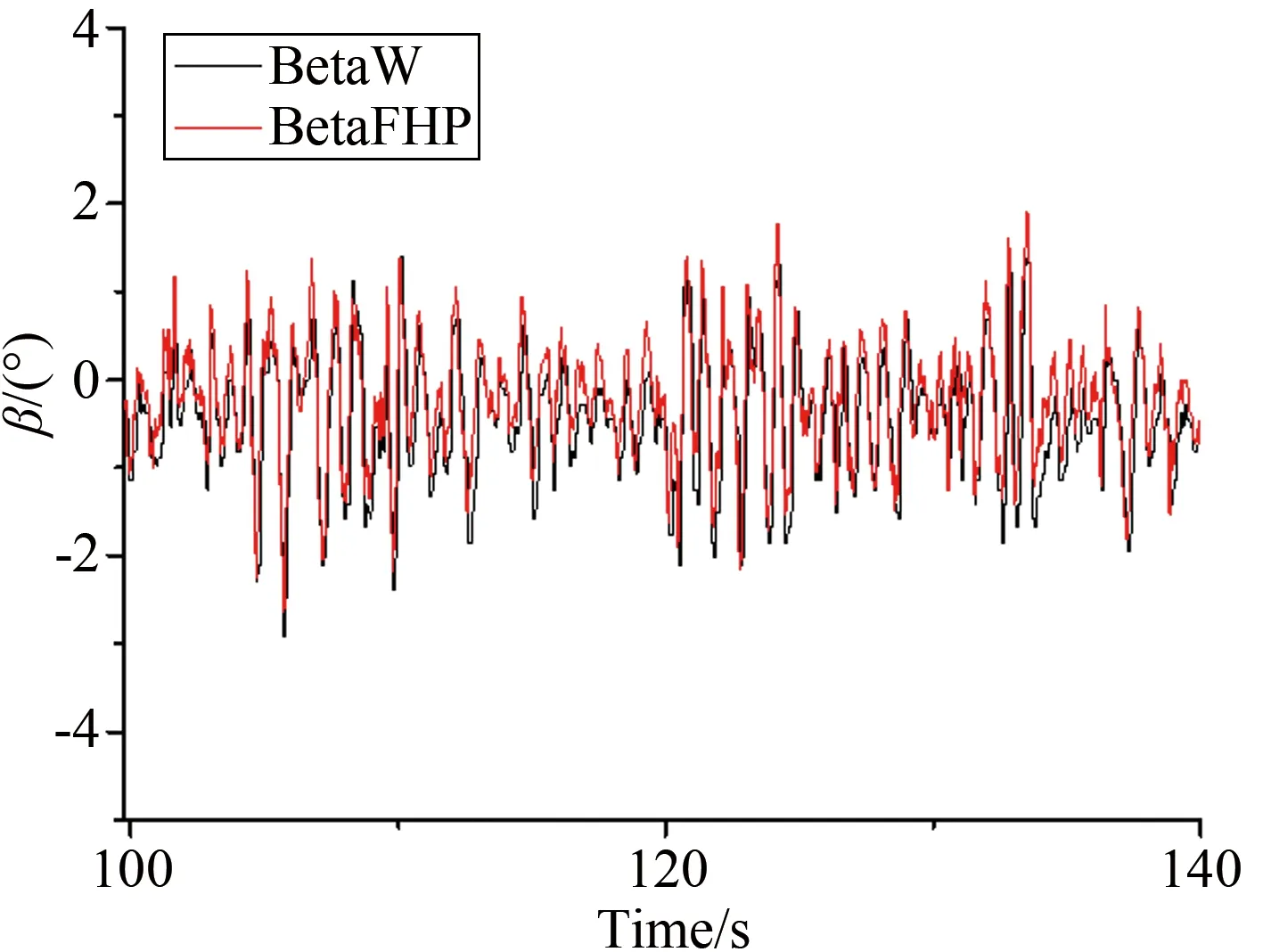
图11 平飞段侧滑角变化
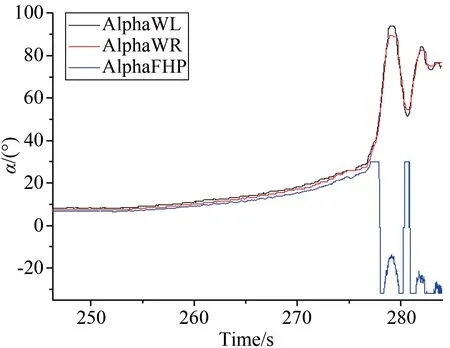
图12 大迎角变化时风标和探针测量结果
Fig.12 Measurement results of wind vane and probe in high attack angle flight
从图10可以看出,在平飞段,模型的迎角在8°左右,由于安装位置引起的绕流场不同,左风标、右风标和探针有固定的系统误差,但变化的跟随性好。图10中,在平飞段,模型的侧滑角稳定在-0.3°左右,且风标和探针的测量值基本一致。图10和11的结果说明,在常规的小迎角飞行条件下,风标传感器具有与五孔探针相当的测量能力,动态响应特性与五孔探针相当。
值得一提的是,本文设计的风标传感器可以准确地测量到大迎角状态下的迎角值。如图12所示,在试验中,模型从8°迎角一直拉起到失速迎角(此时模型失速下沉)。在迎角大于30°后,由于五孔探针头部出现严重的流动分离,五孔探针解算出现不稳定现象,测量结果出现较大的偏差,不能作为飞行控制的状态参数引入飞控系统,也不能用于气动力参数辨识。在此过程中,左风标、右风标均可以测量到真实的迎角大小。可见,本文设计的风标传感器具有指导大迎角飞行的能力,满足小型飞行器在大迎角飞行状态下迎角侧滑角的测量需求。
6 结 论
对比分析了压差比式传感器与风标式传感器的优缺点,并结合试验需求,选取风标式传感器为设计目标。本文所设计的风标式传感器有以下优点:
(1) 风标式传感器比压差比式传感器结构简单、造价低廉、测量范围广、不易受环境影响;
(2) 通过采用绝对式角编码器测量角度,风标式传感器具有抗干扰性能好、精度高、测量范围广等优点;
(3) 通过采用自平衡风标,风标式传感器省去了配重,减小了受机身气流的影响;
(4) 经过风洞试验及飞行试验验证,试验结果表明,迎角测量可达±90°,测量数据准确可靠。
[1] 居后鸿, 曾庆化, 陆辰, 等. 攻角传感器的应用与分析[J]. 航空计算技术, 2013, 43(6): 118-121.
Ju Houhong, Zeng Qinghua, Lu Chen, et al. Application and analysis of angle-of-attack sensors[J]. Aeronautical Computing Technique, 2013, 43(6): 118-121.
[2] William Gracey. Summary of methods of measuring angle of attack on aircraft[R]. NACA-TN 4351, 1958.
[3] 汪磊. 某型攻角侧滑角传感器设计[J]. 科技创新与应用, 2014, 41(22): 31-32.
Wang Lei. Design of sensors of attack angle and sideslip angle[J]. Technology Innovation and Application, 2014, 41(22): 31-32.
[4] 吴大卫, 宋磊, 杨士普, 等. 微小型迎角传感器: 中国, 201420306864.1[P]. 2014-12-10. Wu Dawei, Song Lei, Yang Shipu, et al. Micro angle of attack sensor: China, 201420306864.1[P]. 2014-12-10.
[5] 叶丽娜, 韩玮. 基于绝对编码器的角度测量装置的设计与实现[J]. 舰船电子工程, 2014, 34(6): 128-130.
Ye Lina, Han Wei. Design and realization of angle measurement equipment based on absolute encoders[J]. Ship Electronic Engineering, 2014, 34(6): 128-130.
[6] 付海军, 李小艳. 绝对式编码器的应用[J]. 微电机, 2013, 46(6): 91-93.
Fu Haijun, Li Xiaoyan. Application of absolute encoder[J]. Micromotors, 2013, 46(6): 91-93.
[7] 姜健, 屈霁云, 赵海刚. 五孔探针的设计制造及标定方法研究[J]. 工程与试验, 2014, 54(1): 59-63.
Jiang Jian, Qu Jiyun, Zhao Haigang. Study on development and calibration method for five-hole probe[J]. Engineering and Test, 2014, 54(1): 59-63.
[8] Park M H, Kim S S, Ryoo C K, et al. Development of Alpha sensor for unmanned aerial systems[C]. Japan: SICE Annual Conference, 2008: 2131-2134.
[9] 杜振宇, 石岩, 张丽. 小型自平衡式风标: 中国, 201310623757.1[P]. 2014-04-02.
Du Zhenyu, Shi Yan, Zhang Li. Mini self-balancing wind vane: China, 201310623757. 1[P]. 2014-04-02.
[10] Greene L M. Angle of Attack Sensor: US, 5438865[P]. 1995-8-8.
[11] 张守言. 模型自由飞试验[M]. 北京: 国防工业出版社, 2002: 217-220
Zhang Shouyan. Model free flight experiment[M]. Beijing: National Defend Industry Press, 2002: 217-220
[12] 濮良贵, 纪名刚. 机械设计[M]. 北京: 高等教育出版社, 2010: 111-142
Pu Lianggui, Ji Minggang. Mechanical design[M]. Beijing: Higher Education Press, 2010: 111-142.
[13] 浦广益. ANSYS Workbench 基础教程与实例详解[M]. 北京: 中国水利水电出版社, 2013: 96-104.
Pu Guangyi. ANSYS workbench basic tutorials and example explanation[M]. Beijing: China Waterpower Press, 2013: 96-104.
(编辑:杨 娟)
Design and realization of wind vane sensors of attack angle and sideslip angle based on absolute encoders
Yang Shuai1,*, Huang Ping1, Mao Zhongjun1, Zhang Lihui1, Huang Shaolin2
(1. Computational Aerodynamics Institute, China Aerodynamics Research and Development Center, Mianyang Sichuan 621000, China; 2. Radar Teaching and Research Section, Artillery Training Base of General Staff, Zhangjiakou Hebei 075100, China)
Accurate attack angle measurement is vital for post-stall maneuver. This paper propose a wind vane sensor based on absolute encoders to measure the airflow parameters to support the high angle of attack flight experiment. Firstly, two kinds of sensors are compared. One is the differential pressure ratio sensor, such as the five-hole probe, which is suitable for small angle and high Mach condition. The other is the wind vane sensor, which can follow the wind from any direction and has larger range of measurement. This paper introduces a wind vane sensor based on the absolute encoder, which has compact structure, small volume, fast response and high resolution. This makes it possible for the measurement of the high angle of attack and high angle of sideslip in the model flight test. Secondly, the components of the sensors are introduced. The wind vane sensor consists of the mechanical structure and the measurement system. The former contains wind vane, rotor and bearing support. A new type of self-balancing wind vane is designed in this paper. The vane is made of materials of different densities to achieve the self-balancing, so the bob-weight is not needed any more. The vane is installed in front of the plane to reduce the influence of the plane surface. The vane is exposed in the flow field and follows the variation of the flow, and the moving of the vane drives the angle sensor. The measurement system is an embedded micro-system, which uses the angle sensor to measure the changed angle of the vane, and then computes and outputs the attack angle (sideslip angle) to the flight control system. Choosing a suitable angle sensor is the key. The chosen absolute encoder has high resolution,good dynamic characteristic and convenient access port, which make it a better choice for this design than other angle sensors. Finally, the experimental results are given. In the wind tunnel experiment, the experimental result of the wind vane sensor met the design requirements. In the model flight experiment, the proposed wind vane sensor and a five-hole probe mounted at the head of the flight model responded simultaneously. The experiment results show that the wind vane sensor has close measurement ability compared with the five-hole probe in the small attack angle flight. On the contrary, the vane can measure the high angle of attack (over 30 degree) in the stall experiment while the five-hole probe fails in that situation. So the vane has great advantage in high angle of attack flight tests.
high angle of attack;absolute encoders;self-balancing wind vane;sensors
1672-9897(2016)01-0097-06
10.11729/syltlx20150058
2015-04-22;
2015-08-25
YangS,HuangP,MaoZJ,etal.Designandrealizationofwindvanesensorsofattackangleandsideslipanglebasedonabsoluteencoders.JournalofExperimentsinFluidMechanics, 2016, 30(1): 97-101, 112. 杨帅,黄平, 毛仲君, 等. 一种基于绝对式角编码器的风标式迎角侧滑角传感器的设计与实现. 实验流体力学, 2016, 30(1): 97-101, 112.
V241.4
A

杨 帅(1989-),男,河南许昌人,助理工程师。研究方向:无人机结构设计。通信地址:四川省绵阳市中国空气动力研究与发展中心(621000)。E-mail:18780329161@163.com
*通信作者 E-mail: 18780329161@163.com
