载体动态水平姿态采集处理设计
2016-06-21中国人民解放军海军七一工厂研发部
中国人民解放军海军七〇一工厂研发部 高 幸
载体动态水平姿态采集处理设计
中国人民解放军海军七〇一工厂研发部 高 幸
【摘要】针对载体在各种运动状态下,由于加速度干扰而影响水平姿态传感器检测精度的问题,研究了采用倾角传感器与陀螺为敏感元件的载体水平姿态采集处理方法。主要分析了敏感轴向角运动状态下的载体姿态算法,通过判定载体运动状态,计算、补偿载体倾角信息,提高传感器动态性能。
【关键词】水平姿态;动态;精度;陀螺;姿态算法
0 引言
在军事应用领域中,准确获取车辆、飞行器、舰船、导弹等运动姿态信息是对其进行监控的必备条件。目前广泛使用的摆式倾角传感器,是利用固体、液体、气体在重力场中摆的特性研制而成[1,2]。此类倾角传感器在静止状态下精度及稳定性较高,但由于结构原理的限制,在测量动态载体水平姿态角时无法获得较高精度,为弥补这一缺陷,将陀螺与倾角传感器结合起来研究了一种基于MEMS元件的载体水平姿态采集处理方法,通过研究载体姿态算法,准确判定载体姿态,计算倾角信息,可实时监测载体待测轴向的水平姿态信息。
1 总体设计
设计中,将倾角传感器及陀螺的敏感轴置于同一轴向,陀螺仅敏感待测轴向的角速度信息,倾角传感器敏感待测轴向的倾角信息,两者的输出共同判定载体运动姿态,计算输出载体实时倾角信息,系统框图如图1所示。敏感元件检测到的载体姿态信号同时被A/D采集并转化,通过单片机进行相应计算、补偿,主要包括采集信号、滤波、倾角传感器的零位偏移补偿、非线性度补偿、载体姿态判定以及动态精度补偿等,最后放大输出载体真实倾角信息。
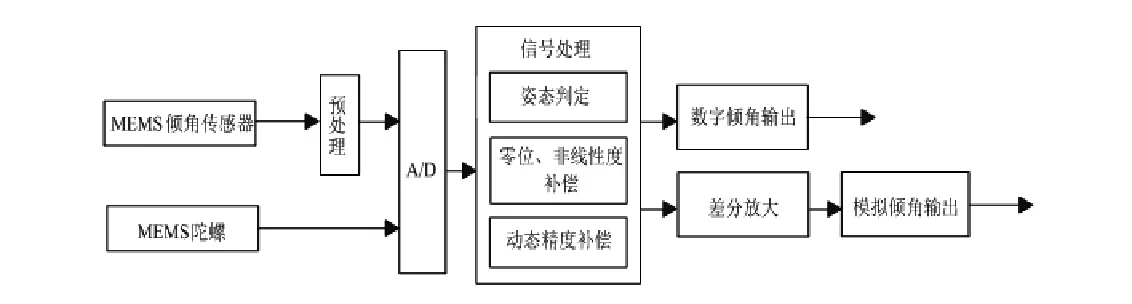
图1 系统方框图
2 姿态算法与运动分析
系统准确检测动载体水平姿态信息首先需要无误差准确判定载体的运动姿态,不同的运动状态,陀螺和倾角传感器输出存在明显区别。姿态算法中,根据不同运动状态下,敏感元件的输出特性,分别设定陀螺与倾角传感器输出门限值A和B,根据表1所示方法,通过比较输出电压与对应门限值,将载体运动分为:动态、静扰、静态和异常状态。
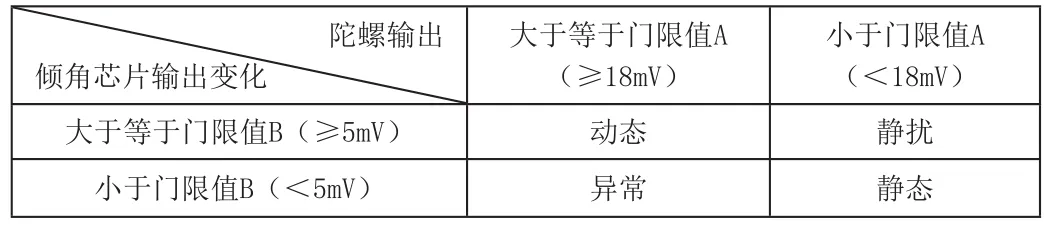
表1 系统状态划分表
进而分析提出不同运动状态下,载体倾角输出算法。如图2所示,静态下,敏感元件输出变化同时小于各自设定门限值,传感器最终输出即为倾角传感器实时输出;静扰状态下,陀螺输出小于设定门限值A时,认定在敏感轴方向无转动;此时,倾角传感器输出变化大于门限值B,则表示存在干扰,传感器最终输出为上一时刻输出;动态下,敏感元件输出变化均大于其设定门限值,将载体运动状态划分为两部分:(1)理论动态,仅敏感轴向角速度运动状态,此时,研究动态算法,提高检测精度。(2)扰动动态,即除敏感轴向角运动外,载体还存在其他方向运动,此时推导载体运动方程,计算近似角速度积分输出载体倾角变化。以下主要针对载体动态进行分析计算。
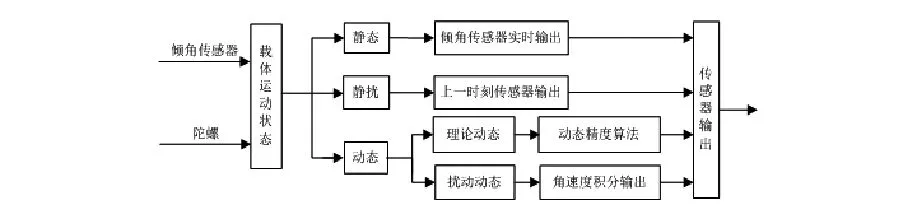
图2 系统实时姿态算法
2.1 理论动态分析
采用MEMS传感器三轴精密转台模拟载体理论动态下,载体在待测敏感轴方向做角振动运动,以敏感轴向20°,0.2Hz振动状态为例,设置敏感轴向运动摇摆角度为±20°,摇摆频率0.2Hz。采集卡同时采集运动平台角度变化数据、传感器组合输出及陀螺输出,采集时间间隔1ms,采集角度变化五周(0°~+20°~0º~-20º~0º为一周),取第三周期(n个采样数据,此状态下:n=5000,i=1~n)观察计算,(三组组数据均为随时间变化的正弦波曲线,即横轴为时间、纵轴为转台摇摆角度、倾角传感器输出电压及陀螺输出电压),摇摆测试台输出数据Yi和传感器组合倾角模拟电压输出数据Vi(补偿前为倾角传感器输出)。




通过电压-角度换算可得动态误差曲线,即倾角传感器采样输出与中框实际摇摆电压的差值曲线,误差曲线如图3中C1曲线所示,计算其补偿前动态精度分辨率为0.6507°设图3中误差曲线为C1,同时选取同次采样其他周期数据C2,以及重复采样数据C3、C4,四条误差曲线基本吻合,倾角误差有明显重复性规律。
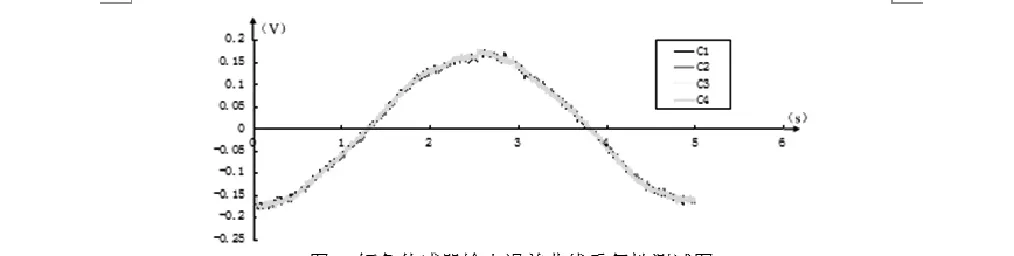
图3 倾角传感器输出误差曲线重复性测试图

2.2 扰动动态分析


运动状态下,水平姿态传感器输出:

在该代谢途径中,转酮醇酶是关键性的酶,对赤藓糖-4-磷酸的代谢量有显著的影响,进而影响赤藓糖醇的最终产量[27]。
则真实值:


由式(3.7)得:

代入式(3.10)得:


代入式(3.14),得:

则:


动态下,倾角传感器受到非轴向加速度干扰时,倾角输出零位差将大于陀螺角速度积分所得角度值,即:
设非轴向加速度产生的误差:

3 信号处理实现
图4 动态补偿程序流程图


4 实验结果
为模拟载体处于扰动动态的运动状态,采用MEMS三轴转台模拟载体同时存在轴向角运动及平面角运动的运动状态。设置敏感轴向角运动,即中框20°,0.2Hz摇摆,并设置内框参数5°,2Hz摇摆(即载体所在平面的角振动),示波器观察运动曲线见图5(a),倾角芯片输出为扭曲的类正弦曲线,通过计算后得到敏感轴向的摇摆正弦曲线。理论动态下,设置敏感轴向角运动,即中框20°,0.2Hz摇摆,输出如图5(b)所示,倾角输出与最终输出均为随载体倾角变化的平滑曲线,此状态下通过计算倾角误差函数,提高动态精度。

图5 载体动态下示波器观测图

图6 误差曲线与补偿曲线对比图
图7 补偿后倾角误差曲线
5 总结
本文从倾角传感器及陀螺为敏感元件的水平姿态传感器组合的工作原理和系统结构出发,研究了载体姿态判定、计算方法,重点分析了载体动态下姿态算法及精度补偿方法,最后,对产品进行了动态测试,测试结果表明,动态下,传感器可准确判定、计算载体运动姿态,理论动态下,通过分析载体姿态算法,补偿输出误差,可有效提高动态精度,20°摇摆范围内,动态精度分辨率≤0.05,传感器动态性能得到明显了提高。
参考文献
[1]张福学.自然对流气流的摆特性及其在传感器中的应用[J].中国工程科学,2002,4(8).
[2]朴林华,张伟,张金铎等.加速度对气体摆式倾角传感器影响机理的探究[J].传感器技术,2004,23(7).
作者简介:
高幸(1988—),安徽合肥人,硕士研究生,主要从事嵌入式系统、惯性器件的研究。
