基于领导者的群体机器人编队及导航控制
2016-06-14高全杰
陈 浩,雷 斌,高全杰
(武汉科技大学机械自动化学院,湖北 武汉,430081)
基于领导者的群体机器人编队及导航控制
陈浩,雷斌,高全杰
(武汉科技大学机械自动化学院,湖北 武汉,430081)
摘要:介绍了基于领导者的群体机器人一致性方法,在此基础上提出一种群体机器人编队及导航控制方法。该方法采用分层控制策略,即控制系统分为目标层、领导层和跟随层。将目标层中目标点的位置信息发送给领导者,采用位置一致性算法使领导者朝目标运动;与此同时,领导者将其状态信息发送给跟随层中的跟随者,采用基于领导者的群体机器人编队控制方法,使跟随者与领导者保持一定的队形朝着目标运动。该方法可针对由多个子集构成的群体机器人系统进行导航。通过计算机仿真和群体机器人实验平台验证了所提方法的有效性。
关键词:群体机器人;多智能体;一致性;领导者;编队;导航;分层控制
随着机器人在工业、农业、医学、建筑业甚至军事等领域中的应用日益广泛,其工作环境和任务也越来越复杂。单个机器人对外部环境信息的获取及处理能力是有限的,因此其发展存在着一定的瓶颈;群体机器人结构简单,设计和制造成本相对较低,而且群体机器人的可扩展性、灵活性、柔性和鲁棒性等都占有较大的优势,因此其应用前景更加广阔。群体机器人控制的一个基本方法是一致性方法,它是个体之间相互作用的规则,描述了每个个体与它相邻个体间的信息交互过程,通过局部的信息交互而使整个群体的状态信息量形成一致。该方法在群体机器人、多智能体系统等研究领域已经取得了一定的成果[1-5]。
一致性方法的一个重要应用是群体机器人的编队控制。编队是指控制群体机器人的方向角、速度以及机器人之间的相对距离形成一致,保持设定的队形朝着同一个方向运动。文献[6]介绍了一种基于一致性的多智能体编队控制方法,通过选择合适的一致性状态信息量,将一致性变体算法运用到编队控制中。文献[7]采用迭代学习控制方法产生一系列的控制信号,用于多智能体的编队控制。文献[8]提出了一种输入受限的编队控制方法,具有较好的实际应用效果。群体机器人编队控制可使群体机器人保持一定的队形进行运动,然而这种运动不具有目的性,要想其运动到指定位置并执行任务,则需进行编队导航控制。文献[9]研究了基于PSO参数优化的群体机器人在位置环境下的编队导航控制。文献[10]研究了传感器约束条件下基于领导者信息的编队导航,提出一种局部控制策略,即采用动态信息交互拓扑结构,也能确保形成预定的编队模式。文献[11]针对多智能体系统提出了模糊逻辑控制的导航控制方法。
本文首先介绍一种基于领导者的一致性方法,然后提出基于领导者的群体机器人编队控制方法以及采用分层控制策略的编队导航控制方法,最后通过仿真和试验对上述方法的有效性进行验证。
1基于领导者的一致性方法
1.1预备知识
1.2数学描述
这里考虑由n+1个机器人组成的群体机器人系统,其中编号为0的机器人为领导者,其他编号1~n的机器人为跟随者。该n+1个机器人的信息交互图={V,E}中,V={0,1,2,…,n},信息交互矩阵为:
跟随者机器人的数学模型为:
(1)
式中:t为时间;ξi∈R和ζi∈R分别表示第i个跟随者机器人的状态信息量和控制输入量。
领导者机器人的数学模型为:
(2)
式中:ξ0∈R和ζ0∈R分别表示领导者机器人的状态信息量和控制输入量。
定义1对于任意初始条件,如果满足
即所有跟随者的状态信息量最终收敛于领导者的状态信息量,则表明群体机器人系统形成具有领导者的一致性。
建立基于领导者的一致性方法如下:
(3)
式中:bi=ai0≥0;wij(t)和wi0(t)为t时刻的加权值。
定理1[12]基本静态连续时间一致性方法(式(3))渐进形成一致,当且仅当其对应的交互图有一条有向生成树。
2基于领导者的编队控制方法
2.1机器人运动模型
一个典型的移动机器人运动模型如下:
(4)
式中:xi、yi分别为机器人i的横坐标和纵坐标;θi、vi、ωi分别为机器人i的方向角、线速度和角速度,其中vi和ωi为控制输入量。
2.2基于领导者的对齐行为一致性方法
对齐行为是用来控制群体机器人的方向角形成一致,使群体机器人朝着同一个方向运动。根据式(3),基于领导者的对齐行为一致性方法可以表示为:
(5)
2.3基于领导者的聚集和分散行为一致性方法
聚集和分散行为是用来控制群体机器人的相对距离形成一致,使群体机器人保持一定的队形。 基于领导者的聚集和分散行为一致性方法可以表示为:
(6)
(7)
令ri=[xi,yi]T、rj=[xj,yj]T、rij=ri-rj,则式(6)和式(7)可以化为:
(8)

综合式(5)和式(8),就得到基于领导者的群体机器人编队控制方法。
3基于领导者的编队导航控制方法
3.1编队导航分层控制策略
在基于领导者的编队控制方法基础上,本文提出一种群体机器人分层编队导航控制方法。将控制系统分为目标层、领导层和跟随层,如图1所示,其中:目标层含有一个目标点,领导层含有一个或多个领导者,跟随层含有一个或多个不相连通的跟随者群,每一个领导者都有与其对应的跟随者群。具体的控制策略为:将目标层的目标信息发送给领导层的领导者,并采用位置一致性方法,使领导者朝着目标点运动;同时,每一个领导者将自身状态信息发送给跟随层中与其相对应的跟随者群,并采用本文提出的编队控制方法与跟随者保持一定的队形朝着目标运动,不同的群体之间不受影响。
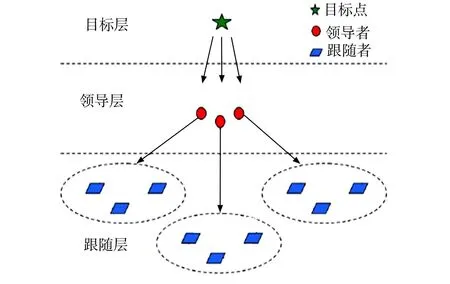
图1 分层控制策略示意图
3.2编队导航控制方法
由领导层和跟随层中的N个机器人组成的群体机器人系统记为g={r1,r2,…,rN},存在m个不连通的子集,每个子集中含有一个领导者和n个跟随者。某一个子集中的群体机器人记为gk={rk0,rk1,…,rkn},1≤k≤m,其中领导者为rk0。采用位置一致性算法,将目标信息发送给领导者rk0,其导航控制方法如下:
(9)
引理1[12]当群体机器人的信息交互图为一条有向生成树时,所有机器人最终收敛于根节点机器人的状态信息。
领导者和目标点可看作是由两个机器人所组成的有向生成树[12],且目标点为根节点。将目标点的位置信息发送给领导者,并采用式(9)的控制方法,由引理1可知,领导者的状态信息量最终收敛于目标点的状态信息量,即领导者运动到目标点位置。向目标点运动的同时,领导者与其对应的跟随者之间采用式(5)和式(8)所示的基于领导者的编队控制方法进行编队运动,到达目标点及其附近,从而完成编队导航运动。同理,其他子集的领导者及所对应的跟随者也采用上述控制方法,从而完成整个群体的编队导航控制。
4编队导航控制仿真与试验
4.1仿真
本仿真采用的群体机器人系统分为两个子集:g1={r10,r11,r12,r13,r14}和g2={r20,r21,r22,r23,r24},其中r10和r20为领导者。每个子集中含有1个领导者和4个跟随者,其信息交互如图2所示,图中箭头表示信息传递方向。
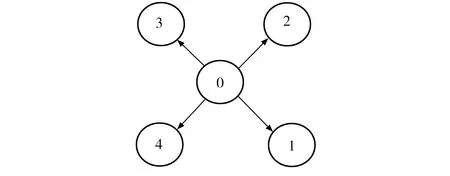
图2 仿真过程中机器人的信息交互
Fig.2 Information interaction between robots in the simulation
图2中含有一条有向生成树,由引理1可知其状态信息量可以形成一致。两个群体机器人子集的信息交互矩阵为:
设定g1中5个机器人的初始位置分别为(12,5)、(20,10)、(6,13)、(20,3)、(4,3),编队运动时,跟随者与领导者在x轴和y轴方向的距离保持为5 m,跟随者之间的距离保持为10 m。设定g2中5个机器人的初始位置分别为(12,66)、(18,70)、(6,73)、(21,64)、(5,52),编队运动时,跟随者与领导者在x轴和y轴方向的距离保持为8 m,跟随者之间的距离保持为16 m。图3为群体机器人的初始状态。采用本文所提出的编队导航控制方法,仿真结果如图4所示。从图4中可以看出,领导者最终都运动到目标点,并与跟随者保持一定的队形,从而验证了该编队导航控制方法的有效性。
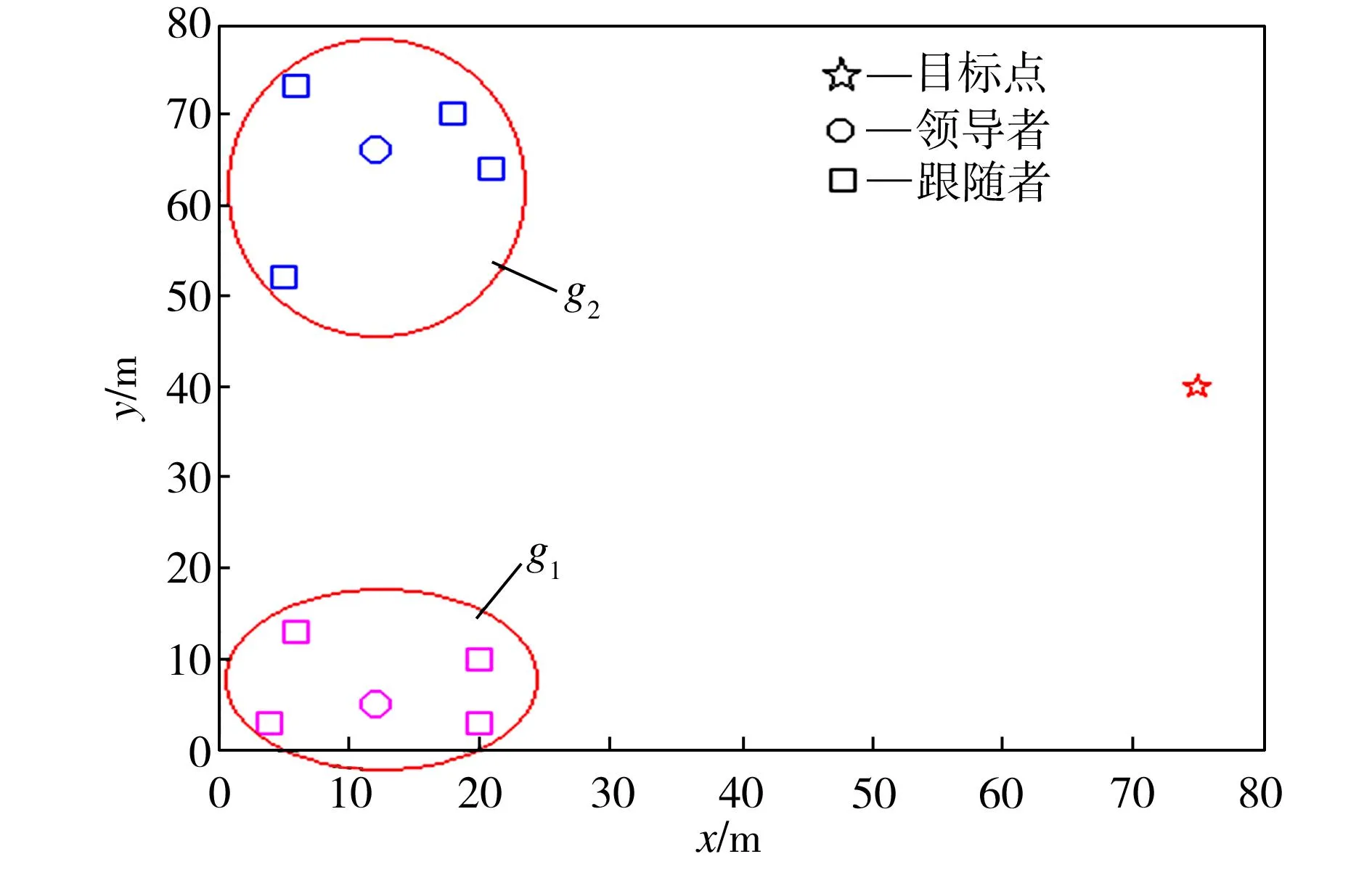
图3 群体机器人的初始状态
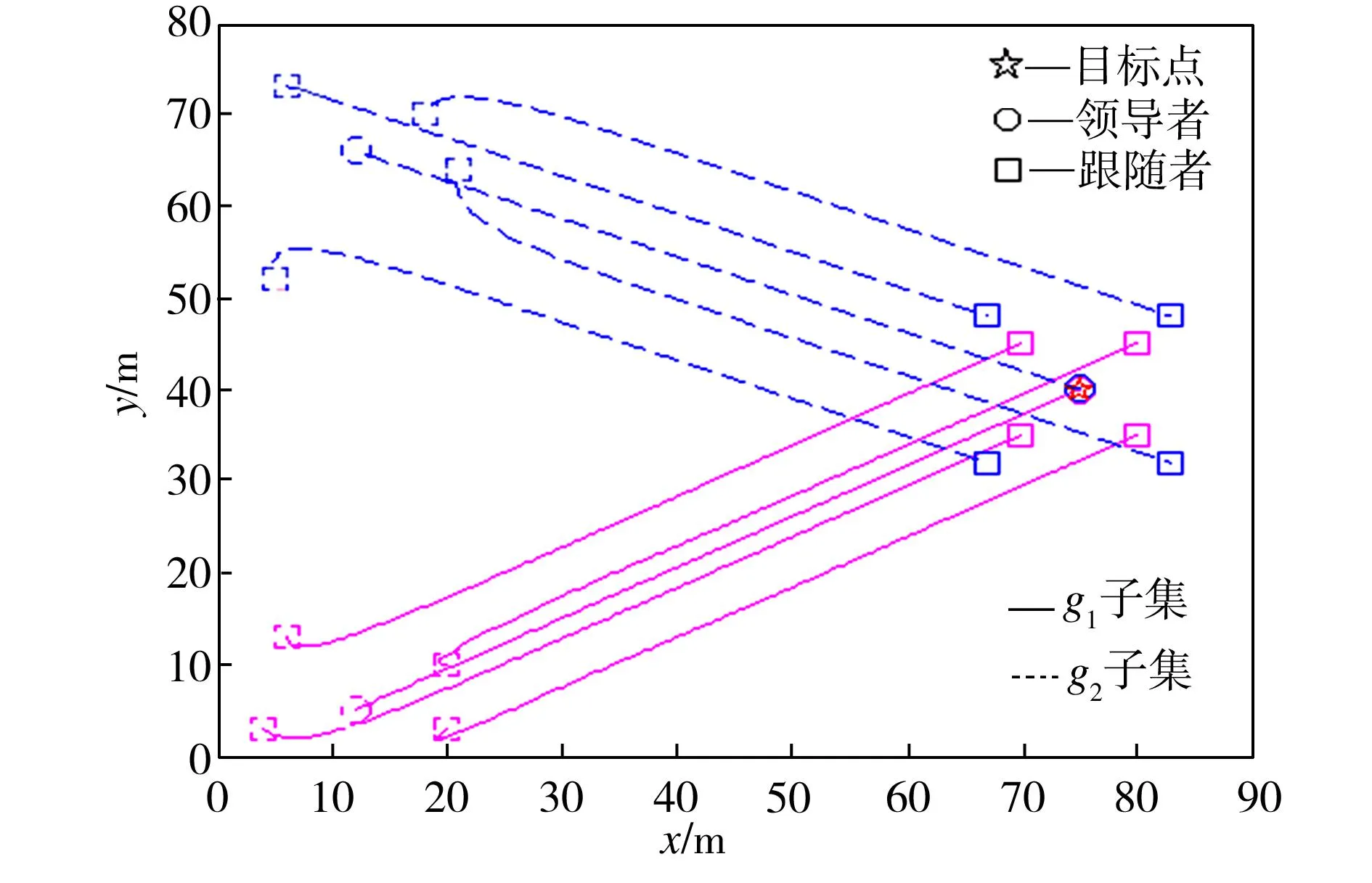
图4 群体机器人编队导航控制仿真结果
Fig.4 Simulation result of formation and navigation control for swarm robots
4.2试验
采用本文提出的编队及导航控制方法在由3个机器人组成的群体机器人实验平台上进行试验。该群体机器人有一个领导者和两个跟随者,表示为g={r0,r1,r2},其信息交互如图5所示,设定r0与r1及r2的编队距离均为0.2 m。编队及导航控制试验结果如图6所示。从图6中可以看出,机器人最后保持一定的编队运动到了指定目标处,进一步验证了本文所提出的群体机器人编队及导航控制方法的有效性。
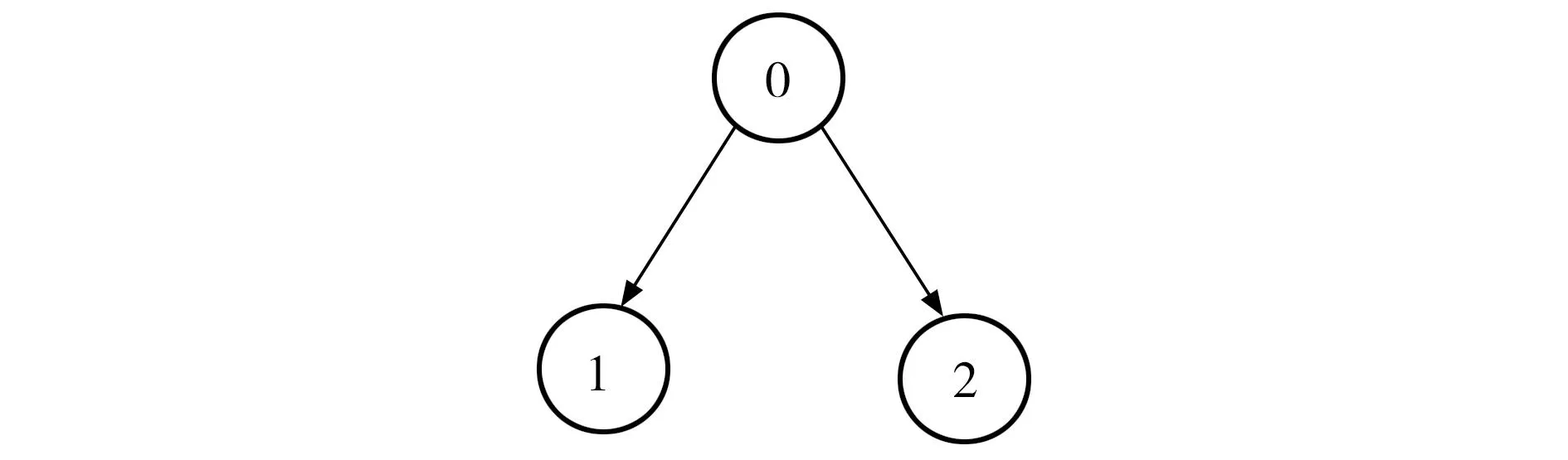
图5 试验过程中机器人的信息交互
Fig.5 Information interaction between robots in the experiment
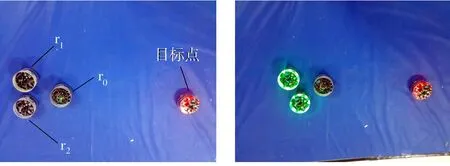
(a)初始状态(b)t=3 s
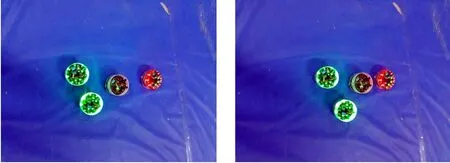
(c)t=7 s(d)t=9 s
图6群体机器人编队导航控制试验结果
Fig.6 Experimental results of formation and navigation control for swarm robots
5结语
本文提出了基于领导者的群体机器人编队控制方法以及基于领导者的群体机器人编队导航控制方法,该方法采用分层控制策略,即将控制系统分为目标层、领导层和跟随层,可针对由多个子集构成的群体机器人系统进行导航。最后通过计算机仿真和群体机器人实验平台验证了该方法的有效性。
参考文献
[1]Olfati-Saber R,Murray R M. Consensus problems in networks of agents with switching topology and time-delays[J]. IEEE Transactions on Automatic Control, 2004, 49(9): 1520-1533.
[2]Ren Wei, Beard R W. Consensus seeking in multi-agent systems under dynamically changing interaction topologies[J]. IEEE Transactions on Automatic Control, 2005, 50(5): 655-661.
[3]Ren Wei, Atkins E. Distributed multi-vehicle coordinated control via local information exchange[J].International Journal of Robust and Nonlinear Control, 2007,17:1002-1033.
[4]Yu Wenwu, Chen Guanrong, Cao Ming. Some necessary and sufficient conditions for second-order consensus in multi-agent dynamical systems[J]. Automatica, 2010, 46: 1089-1095.
[5]Yang Tao, Meng Ziyang, Dimarogonas D V,et al. Global consensus for discrete-time multi-agent systems with input saturation constraints[J]. Automatica,2014,50: 499-506.
[6]Ren Wei. Consensus based formation control strategies for multi-vehicle systems[C]//Proceedings of the 2006 American Control Conference. Minneapolis, Minnesota, USA, June 14-16, 2006:4237-4242.
[7]Meng Deyuan, Jia Yingmin, Du Junping, et al. On iterative learning algorithms for the formation control of nonlinear multi-agent systems[J]. Automatica, 2014, 50: 291-295.
[8]Lei Bin, Chen Hao, Zeng Liangcai, et al. Consensus algorithm with input constraints for swarm robots formation control[C]//Proceedings of the 2015 IEEE 12th International Conference on Networking, Sensing and Control. Taipei, April 9-11, 2015:157-162.
[9]Liu Qiang, Ma Jiachen, Zhang Qi. PSO-based parameters optimization of multi-robot formation navigation in unknown environment[C]//Proceedings of the 10th World Congress on Intelligent Control and Automation. Beijing, July 6-8, 2012:3571-3576.
[10]Li Yangmin, Chen Xin. Leader-formation navigation with sensor constraints[C]//Proceedings of the 2005 IEEE International Conference on Information Acquisition. Hong Kong and Macau, June 27-July 3, 2005: 554-560.
[12]雷斌. 群体机器人系统合作控制问题研究[D]. 武汉:武汉理工大学, 2009.
[责任编辑尚晶]
Formation and navigation control for swarm robots based on leader
ChenHao,LeiBin,GaoQuanjie
(College of Machinery and Automation, Wuhan University of Science and Technology, Wuhan 430081, China)
Abstract:A consensus algorithm for swarm robots based on leader is introduced. On the basis of this algorithm, a formation and navigation control method for swarm robots is proposed. It uses hierarchical control strategy, and the control system is divided into target layer, leader layer and follower layer. Position information of target point in the target layer is sent to the leader, and then the leader is impelled to move towards the target by using the position consensus algorithm. Meanwhile, the leader’s status messages are delivered to his followers in the next layer, and the formation control algorithm based on leader is adopted to control the leader and his followers moving to the target with the right formation. The proposed approach can be used to navigate swarm robots system consisting of multiple subsystems, and its validity is verified by computer simulation and swarm robots experimental platform.
Key words:swarm robots; multi-agent; consensus; leader; formation; navigation; hierarchical control
收稿日期:2016-01-06
基金项目:国家自然科学基金资助项目(61305110);武汉科技大学青年科技骨干培育计划项目(2011xz007).
作者简介:陈浩(1989-),男,武汉科技大学硕士生. E-mail:chenhao894@163.com通讯作者:雷斌(1979-),男,武汉科技大学副教授,博士. E-mail:leibin@wust.edu.cn
中图分类号:TP273
文献标志码:A
文章编号:1674-3644(2016)03-0219-05
