无模型自适应控制下的风轮动态载荷控制
2016-06-06聂向欣
聂向欣,刘 姝
(沈阳工程学院a.新能源学院;b.新能源学院,辽宁 沈阳 110136)
无模型自适应控制下的风轮动态载荷控制
聂向欣a,刘姝b
(沈阳工程学院a.新能源学院;b.新能源学院,辽宁 沈阳 110136)
摘要:随着能源结构的不断调整,风电机组的制造量在逐年增加,与此同时,风力机的尺寸也越来越大,对于风轮来说,这无疑会使其柔性增加,更为重要的是,风轮会受到较为复杂的动态载荷,因此必须要对其进行控制,以此来延长机组寿命,提升其运行效率。基于风电机组的线性化模型,通过坐标变换理论,将叶片根部的弯矩反馈到到两个固定的直交坐标系,设计出了一种无模型自适应控制器对风轮的动态载荷进行控制,有效地消除了风轮的俯仰力矩和偏转力矩。在FAST和SIMULINK的联合仿真下,验证了控制器的有效性。
关键词:风轮;动态载荷;坐标变换;无模型自适应控制
1风电机组风轮叶片根部载荷反馈原理
对于统一变桨来说, 在载荷分析中要对3个叶片的载荷同时进行考虑,而独立变桨则不然,它的主要特点就是要分别去考虑作用在每个叶片上的载荷,因此,需要将叶片和传动系统进行刚性的假设。另外,因为发电机的力矩可控,叶根的弯矩可以准确测量,所以可以结合风电机组的GL坐标系对风轮的受力进行分析。
首先,计算叶片上的载荷。
1)计算叶片上的力。
叶片x方向上的受力主要是由空气引起的推力:
(1)
式中,ρ为空气密度;R桨叶为风轮半径;cx为x向推力系数;U为来流风速。
叶片y向和z向的力是由气动力、重力和惯性力的耦合作用引起的:
(2)
式中,Fy,空气,桨叶、Fz,空气,桨叶为空气动力的y向和z向分量;Fy,重气,桨叶、Fz,重力,桨叶为叶片重力y向和z向分量;Fy,惯,桨叶、Fz,惯,桨叶为惯性力y向和z向分量。
y向和z向空气动力分量的计算与叶片上面的推力计算类似:
(3)
y向和z向重力分量在重力总是竖直向下的,可以表示为:
(4)
式中,m桨叶为桨叶质量;θ为叶片方位角。

图1 风电机组GL坐标系
惯性力在y向和z向差距较大,这是因为Fy,惯,桨叶主要由加速度引起,Fz,惯,桨叶主要由离心力引起,则两者可以表示为:
(5)
式中,R毂为轮毂半径;z为叶片质心z轴坐标。
2)计算桨叶上的力矩。
x向的力矩Mx,桨叶(指的就是GL坐标系中的的MXB,但为了方便计算,所以另作表示,下文同)的主要作用是使风轮旋转,因此可以将其排除在动态载荷之外。y向和z向力矩是由于空气动力引起的动态载荷,可以表示为:
(6)
然后,计算轮毂上的载荷。将上面叶根坐标系下计算得到的载荷做转换处理,使之映射到轮毂坐标系中:
式中,m桨为轮毂质量。
轮毂上的弯矩:
最后,计算机舱上的载荷。值得说明的是,机舱上的的载荷和轮毂上的载荷大致相等,唯一不同的是机舱z轴方向要承受发电机的重力和机舱自身的重力,即:(m机+m舱)g。
(9)
y轴和z轴的弯矩也被叫做倾斜力矩和偏转力矩:
(10)
式中,h毂为轮毂的中心高度;xov为塔顶和风轮中心的距离。
为了方便控制器的设计,需要对风电机组的相关工作点进行特定的线性处理,首先就是对水平推力的线性化:
(11)
Ud和Uq是3个叶片的平均风速及其在d-q轴上分量的叠加,βd和βq是3个桨叶角在d-q轴上的分量,结合应用在交流电机控制中的Park变换,可以得到线性化的倾斜力矩和偏转力矩:
(12)
接下来,对叶片桨距角的驱动单元进行建模,电机驱动的变桨距单元可以认为是二阶系统:
(13)

b1Δβ桨叶(k-1)+b2Δβ桨叶(k-2)
(14)
在Park变换中,采用离散的时间t=kT,T为采样时间。通过坐标变换,可以得到一个依靠变桨进行驱动的模型。
(15)
(16)
在伺服驱动的作用下,坐标系中的d轴和q轴会发生一定的作用,导致真实桨距角和理想桨距角之间出现一定的延迟,因此,桨距角要进行参数变换:
θ桨叶→θ桨叶+φ伺服(μ)
(17)
式中,φ伺服(μ)为由于伺服驱动引起的转动频率的相位延迟。
2无模型自适应控制器的设计
通常的变桨距风电机组有3个运行区间,分别是停机状态下运行,额定风速以下运行以及额定风速以上运行,如图2所示。当风速低于额定风速时,风力发电机组要根据风速的变化,进行变桨变速控制,从而达到最佳的叶尖速比,使风能捕获和功率输出最大化最佳功;当风速超过额定风速时,需要通过变桨调节桨距角来实现对风轮不平衡动态载荷的控制。

图2 变桨距风力发电机运行区间
此控制器并非完全采用独立变桨,而是在其基础上,将控制器的功能一分为二,也就是既可以实施统一变桨又可以实施独立变桨,通过统一变桨主要实现对功率的控制,通过独立变桨主要实现对风轮动态载荷的控制。两个控制器会在高于额定风速时同时投入工作:对于统一变桨距控制器而言,其主要工作就是使3个叶片同时进行变桨,以此使输出功率维持在一个平稳的状态;而独立变桨距控制器的的主要目的是检测每个叶片不平衡载荷,然后通过控制器的算法得到每个叶片需要的桨距角,叶片桨距角的调节最终通过两个控制器共同实现。另外,采用一般的PID控制方法实现对统一变桨距控制器的设计,设计图如图3所示。
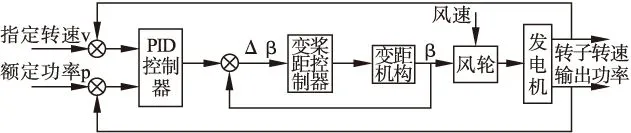
图3 统一变桨距控制器结构框图
无模型自适应独立变桨距控制器的原理的泛模型为
(y*(k+1)-y(k))
(18)
式中,y(k)为被控系统的输出;u(k-1)为控制器的输出;φ(k)为y(k)对u(k-1)对梯度的偏导形式向量∂y(k)/∂u(k-1);ρk为学习步长;λ为惩罚因子。
控制器设计的原理图如图4所示,结构图如图5所示。
首先,测量叶跟的弯矩My1、My2、My3,由式(12)建立的关系计算得到d-q坐标系下的M斜和M偏,然后,由所设计的控制器进行特定的计算,分别得出2个轴上桨距角需要的变化量βd和βq,最后再通过该坐标系进行逆变换处理,便可计算出3个叶片的实际需要的变化量β1、β2、β3。

图4 MFA控制器原理

图5 MFA控制器结构
(19)

3仿真与分析
此模块的仿真采用FAST和SIMULINK的联合仿真,FAST软件是一种针对于水平轴风电机组的软件,主要用于风轮叶片性能的分析和仿真,尤其是对于功率、载荷和偏航可以达到比较好的仿真效果。
仿真以1.5 MW风电机组为对象,采用IEC标准的风速模型,在高于额定风速下进行研究。仿真框图如图6所示。
仿真结果表明,采用了基于独立变桨的无模型自适应控制器后,风轮的俯仰弯矩和偏转弯矩的无论是从峰值还是均值都显著减小,这表明该控制器可以显著抑制载荷波动,降低风轮的不平衡载荷,有效减小风轮的动态载荷。

图6 Simulink仿真框图
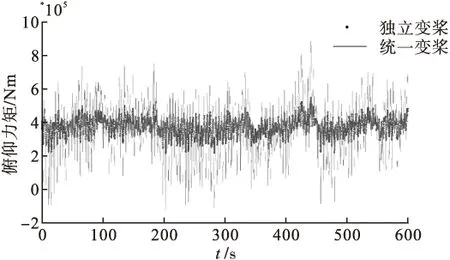
图7 俯仰弯矩对比

图8 偏转弯矩对比
参考文献
[1] 黄帅.MW级变速恒频风电机组独立变浆控制技术研究[D].重庆:重庆大学,2012.
[2]李传庆,刘广生.基于Matlab Simulink的MFA控制模块开发与仿真[J].控制工程,2008,15(z1):61-84.
[3]张钊.大型水平轴风力机叶片气动优化设计及气动载荷分析[D].兰州:兰州理工大学,2013.
[4]刘雄,李钢强,陈严,等.水平轴风力机叶片动态响应分析[J].机械工程学报,2010,46(12):130-131.
[5]黄小华,赵世林,周传捷,等.风力发电机组机舱底座强度与模态分析[J].沈阳工业大学学报:自然科学版,2009,31(2):156.
[6]陈嫦娥,毛承雄,王丹,等.多相交流系统的Park 变换[J].高压电技术,2008,34(11):2476-2480.
[7]范烨.风力发电电动变桨距伺服系统的研究[D].太原:太原理工大学,2013.
[8]夏安俊,徐浩,胡书举,等.大型风电机组的功率曲线自寻优控制策略[J].高电压技术,2012,38(8):2024-2027.
[9]王晓东,姚兴佳.基于泛模型的风轮不平衡载荷控制[J].太阳能学报,2012,33(2):217-218.
(责任编辑佟金锴校对张凯)
Dynamic Load Control of Wind Turbine Based on Model-free Adaptive Control
NIE Xiang-xin,LIU Shu
(School of New Energy,Shenyang Institute of Engineering,Shenyang 110136,Liaoning Province)
Abstract:With the continuous adjustment of energy structure,the manufactured number of wind turbine is increasing year by year. At the same time,the greater size of wind turbine will undoubtedly increase the flexibility of wind turbines that will be affected by complex dynamic loads. Therefore,we must carry out the load control to extend the service life of the machine and improve its operating efficiency.Based on the linear model of wind turbine generation,a model-free adaptive controller was designed to control the dynamic load of the wind turbine in this paper by transferring the loads of blade roots into two fixed orthogonal axis. The joint simulation of FAST and SIMULINK verified the effectiveness of the controller.
Key words:Wind turbine;Dynamic load;Coordinate transformation;Model-free adaptive control
中图分类号:TK81
文献标识码:A
文章编号:1673-1603(2016)02-0103-05
DOI:10.13888/j.cnki.jsie(ns).2016.02.002
通讯作者:刘姝(1973-),女,辽宁凌源人,讲师,博士,主要从事风力发电技术方面的研究。
作者简介:聂向欣(1991-),男(满族),河北承德人,硕士研究生。
收稿日期:2015-06-14
