单相LCL型并网逆变器的滑模控制策略
2016-06-02姜慧鹏刘宜成庞冰洋四川大学电气信息学院四川成都610065
姜慧鹏,刘宜成,蒲 明,庞冰洋(四川大学电气信息学院,四川成都610065)
单相LCL型并网逆变器的滑模控制策略
姜慧鹏,刘宜成,蒲明,庞冰洋
(四川大学电气信息学院,四川成都610065)
摘 要:为了改善单相LCL型并网逆变器的稳态性能和瞬时响应性能,提出了一种基于改进切换函数的滑模控制策略。该控制策略从开关函数模型角度分析单相LCL型并网逆变器的数学模型,得到系统的状态方程。通过选取合适的滑模面,求得等效控制。提出一种改进的切换函数设计滑模控制器,并用李雅普洛夫第二法证明了系统的稳定性。最后用MATLAB对系统进行了仿真实验,仿真结果表明,采用该控制策略的逆变器具有较好的稳态性能和瞬时响应性能,其并网电流畸变率为0.41%。
关键词:滑模控制;并网逆变器;LCL;李雅普洛夫第二法
0 引言
目前,煤炭、天然气等不可再生资源的日益消耗,使环境污染越来越严重,各国都在积极寻求高效、清洁的可再生能源,利用太阳能发电的技术及设备成为研究热点[1]。
并网逆变器就是其中的一项关键设备,它将光伏电池输出的直流电转换为有谐波的交流电。为了减小谐波的影响,需要对逆变过后的并网电流进行滤波[2]。LCL滤波器的体积小且能有效滤除电流中的高频分量,因此被越来越多地采用。不过这种滤波器的电容支路会引起谐振,这就要求控制器具有更强的稳态性能和更好的响应性能[3-5]。
逆变器控制方法已有很多学者研究,常见的几种也各有其优劣势。滞环控制稳定性好、响应快,但要求开关频率高,损耗加大[6-8]。PI控制技术成熟、可靠性高,但具有稳态误差[9-10]。另外有学者采用具有较好稳定性、鲁棒性和瞬时响应特性的滑模控制[10-11],但对逆变器的模型做了一定的简化,且在控制器中引入了基于传递函数模型的PI控制。本文从开关函数角度出发,推导了单相LCL型并网逆变器的数学模型,并采用基于改进切换函数的滑模控制策略设计控制器。最后,用MATLAB仿真验证了控制器的有效性和正确性。
1 电路结构及数学模型
单相LCL型并网逆变器采用桥式逆变,并网侧用LCL滤波器滤波,电路结构如图1所示。其中,Udc、Uin、UC和e分别直流侧电压、逆变器输出电压、滤波电容电压和并网电压;iL、iC、ig分别为流过逆变器侧电感L1的电流、流过滤波电容Cf的电流和流过网侧电感Lg的并网电流[12]。

图1 单相LCL型并网逆变器的电路结构
由基尔霍夫电压和电流定律,列出各个回路的电路方程如下:

其中,Sk为开关函数。
以上方程可化简为:


2 滑模控制器的设计
滑模控制有基于等效控制和基于趋近律的两种实现方法[13],这里采用基于等效控制的方法。设计步骤如下。
首先选取滑模面:

其中,k1、k2为大于零的常数。
由s=0得:

将式(3)代入推导得:

在取切换控制时,采用改进的切换控制函数:

其中,k3、k4为大于零的常数。则可以得到控制量u =ueq+ un,即:

这里得到的控制量是一个连续的时间信号,需要通过一个PWM产生器,产生4个开关信号来控制全桥的对应开关。
3 稳定性的证明
取正定标量函数:

则有:

将以上各公式代入得:

其中

又因f(ueq)为式(5)中x3的导数值,即:

代入式(11)中得:

根据李雅普诺夫第二法的相关论述可知系统稳定。
4 系统仿真分析
为了证明改进的滑模控制器的有效性,用MATLAB对一台额定容量为1 kVA的并网逆变器进行了仿真,控制器分别采用双闭环(PI+P)控制策略[14]和改进的滑模控制策略。表1列出了系统的仿真参数。

表1 仿真参数
为观察系统的稳态性能,在并网逆变器稳定运行时,分析并网电压与并网电流,并对并网电流做FFT分析。为了突出对比,将电流放大了10倍显示。
采用双闭环(PI+P)控制策略时,并网电压和并网电流如图2所示,并网电流的FFT分析如图3所示,并网电压与并网电流同频同相,THD为0.66%。
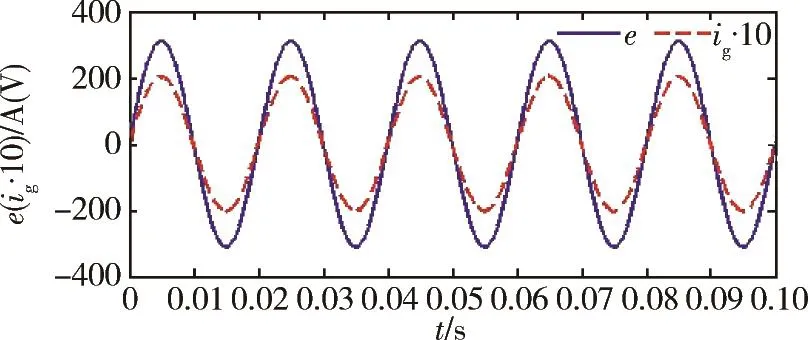
图2 并网电压和并网电流
采用改进的滑模控制策略时,并网电压和并网电流如图4所示,并网电流的FFT分析如图5所示,并网电压与并网电流同频同相,THD为0.41%,系统具有较好的稳态性能。

图3 并网电流的FFT分析

图4 并网电压和并网电流
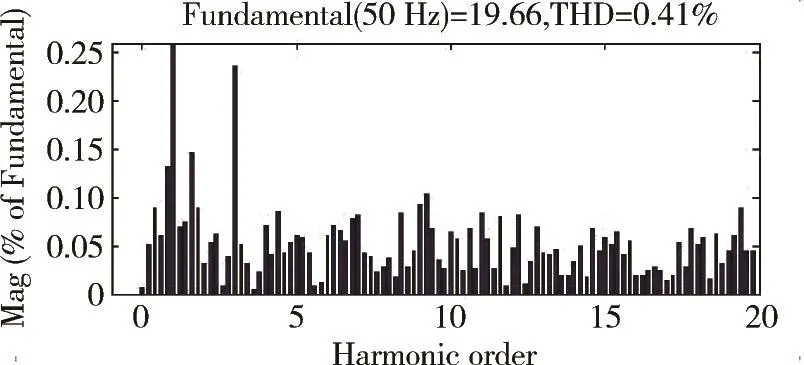
图5 并网电流的FFT分析
为观察系统的瞬时响应性能,分析了负载在满载与半载之间跳变的情况,得到了跳变(跳变时刻t=0.025 s)时的并网电流波形。
采用双闭环(PI+P)控制策略时,半载至满载跳变的情况如图6所示,满载跳变至半载的情况如图7所示,并网电流能在0.002 s(0.1个周期)内恢复稳定运行,且有最大为0.7的超调。

图6 半载跳变至满载

图7 满载跳变至半载
采用改进的滑模控制策略时,半载至满载跳变的情况如图8所示,满载跳变至半载的情况如图9所示,并网电流能在0.001 s(0.05个周期)内恢复稳定运行,且没有超调,系统具有较好的瞬时响应性能。

图8 半载跳变至满载

图9 满载跳变至半载
5 结论
本文推导了单相LCL型并网逆变器的数学模型,提出了一种基于改进切换函数的滑模控制策略。1 kVA并网逆变器的仿真研究表明,采用本文所提出的滑模控制策略,系统具有较好的稳态性能,在负载跳变后,系统能快速地恢复稳定运行,具有很好的瞬时响应特性。
参考文献
[1]艾欣,韩晓男,孙英云.大型光伏电站并网特性及其低碳运行与控制技术[J].电网技术,2013,37(1):15-23.
[2]李泽斌,罗安,田园,等.LCL型光伏并网逆变器电流内环控制方法[J].电网技术,2014,38(10):2772-2778.
[3]赵晋斌,张元吉,屈克庆,等.单相LCL并网逆变器控制策略综述[J].电工技术学报,2013,28(10):134-142.
[4]戴训江,晁勤.基于LCL滤波的光伏并网逆变器电流滞环控制[J].电力电子技术,2009,43(7):33-35.
[5]臧鹏,洪峰,辛张楠,等.LCL滤波器型双Buck并网逆变器[J].电子技术应用,2015,41(10):129-132.
[6]马小虎,袁晓玲,施俊华.改进滞环电流控制策略在光伏并网中的研究[J].电源技术,2013,37(11):2019-2022.
[7]彭传彪,王少坤,王晓锋,等.自适应滞环电流控制逆变器复合控制策略[J].电力自动化设备,2011,31(7):42-47.
[8]黄少辉,林培杰,程树英,等.电流型并网逆变器的模糊滞环控制[J].微型机与应用,2015,34(13):73-76.
[9]韩金刚,朱瑞林,汤天浩,等.LCL型并网逆变器并网电流复合控制研究[J].太阳能学报,2014,35(9):1599-1605.
[10]何翔,张代润.基于滑模控制的三相光伏并网逆变器研究[J].电源技术,2014,38(4):672-675.
[11]王朗珠,丁茂桃,郑连清.一种新的三相电压型PWM整流器控制[J].电力电子技术,2012,46(5):57-59.
[12]黄挚雄,徐保友,沈玲菲,等.LCL并网逆变器新型电流双闭环控制策略研究[J].电力系统保护与控制,2012,40(17):1-5.
[13]刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2005.
[14]吴卫民,刘松培,何远彬.单相LCL并网逆变器电流控制综述[J].电源技术,2011,34(2):52-58.
姜慧鹏(1990 -),男,硕士研究生,主要研究方向:电力电子及其控制技术。
刘宜成(1975 -),男,博士,副教授,主要研究方向:非线性控制。
蒲明(1981 -),男,博士,讲师,主要研究方向:滑模控制。
引用格式:姜慧鹏,刘宜成,蒲明,等.单相LCL型并网逆变器的滑模控制策略[J].微型机与应用,2016,35(10):72-74,78.
Sliding mode control strategy for single-phase grid connected inverter with LCL filter
Jiang Huipeng,Liu Yicheng,Pu Ming,Pang Bingyang
(School of Electrical Engineering and Information,Sichuan University,Chengdu 610065,China)
Abstrac t:In order to improve the static and dynam ic performance of the single-phase grid connected inverter with LCL filter,a sliding mode control strategy based on an improved switching function is proposed.This control strategy,from the point of switching function model,analyses themodel of the system and obtains its state equation .By selecting proper slidingmode surface,it gets the equivalent control,puts forward a slidingmode controller using improved switching function and then proves the system stability by the second Lyapunov method.At last,it builds the inverter simulation experiment using MATLAB,and the simulation results show that the inverter using this strategy has a good dynamic response performance,and its total harmonic distribution of grid current is 0.41%.
Key w ords:sliding mode control;grid connected inverter;LCL filter;second Lyapunov method
作者简介:
收稿日期:(2016-02-23)
中图分类号:TM46
文献标识码:A
DOI:10.19358 /j.issn.1674-7720.2016.09.025
