液压钻具输送装置研制
2016-05-18王建伟孙丽丽王卫华刘士岩吴国辉李慎奎
王建伟,孙丽丽,王卫华,刘士岩,张 宁,吴国辉,李慎奎
(华北石油荣盛机械制造有限公司,河北 任丘 062552)
液压钻具输送装置研制
王建伟,孙丽丽,王卫华,刘士岩,张宁,吴国辉,李慎奎
(华北石油荣盛机械制造有限公司,河北 任丘 062552)
摘要:针对斜直井钻机不能使用吊卡、固定猫道等工具的问题,需要采用新的工具来完成接单根工作。通过研究斜直井钻机液压顶驱、液压大钳、提升系统的特点,研制出液压钻具输送装置,其功能类似于动力猫道,由变幅机构、伸缩机构、翻转机构、小钳子等组成。装置通过液压控制,操作人员少,劳动强度低,安全性和生产效率大幅提高。
关键词:轻型钻机;接单根;钳子;坡道;液压
全液压控制是目前各轻型钻机生产厂家普遍选用的设计思路,通常配备液压顶驱、提升系统、液压(气动)卡瓦等,而且一些辅助设备也实现了液压控制,包括液压升降的钻台、液压自动排管和钻具输送系统等。国外先进钻机一般采用全液压控制装置,自动化程度高,大幅降低了工人的劳动强度[1]。目前,国外生产商有雪姆、阿特拉斯、宝峨、FORMOST等,国内生产厂家有石油四机厂、南阳二机集团、黄海机械、渤海中成装备等。华北石油荣盛机械制造有限公司在2011年也推出了一款MZJ-15XY型斜直井煤层气液压钻机。
国外钻机大多配有井场钻具自动上、下钻台的装置,又名动力猫道[2]。在起下钻过程中,需要将钻杆从井口移送到排放架或从排放架移送到井口,即钻杆排放操作。其特点是一个重复性高而劳动强度大的过程;花费大量时间;需要多人合作共同完成[3];具有危险性。由于新型斜直井钻机不使用吊卡、固定猫道等工具,因此必须采用新的工具来完成接单根工作。通过研究斜直井钻机,结合钻机的液压顶驱、液压大钳、提升系统的特点,开发出液压钻具输送装置。其功能类似于动力猫道,包括变幅机构、伸缩机构、翻转机构、小钳子等,可通过液压控制,操作人员少,劳动强度低,提高了安全性和生产效率。
1结构设计
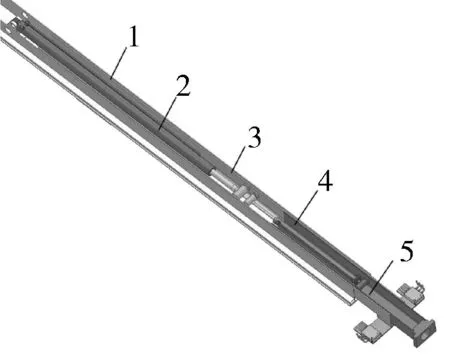
1.1总体结构
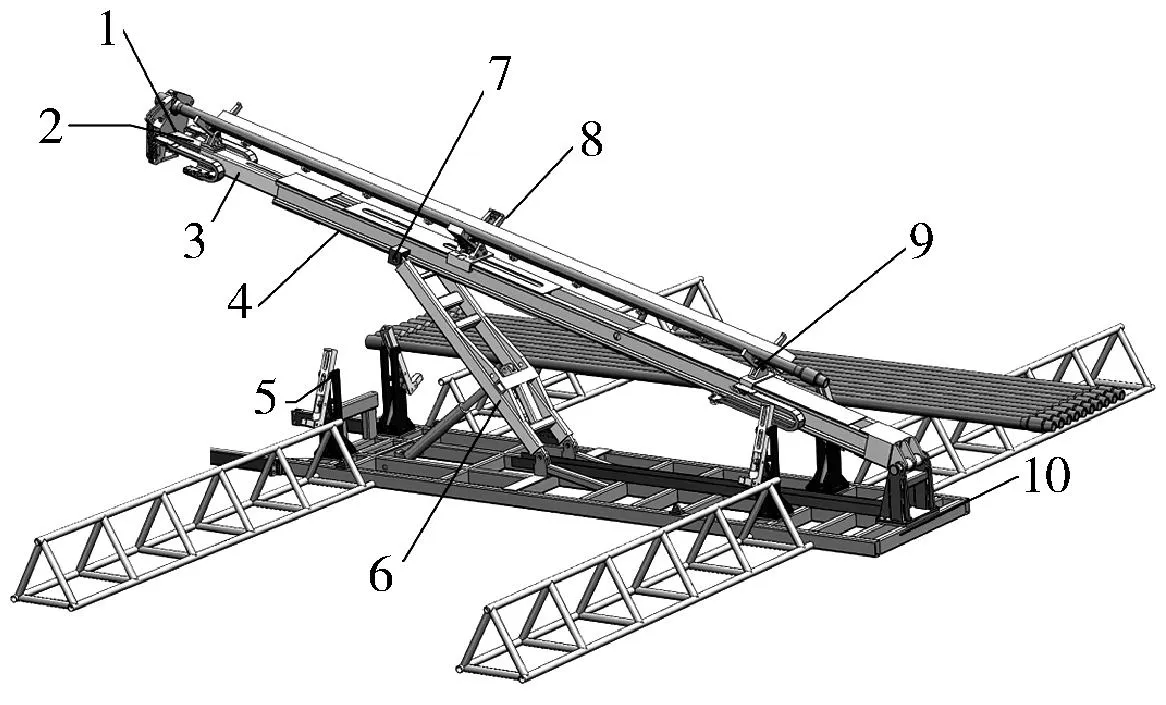
1—小钳子;2—小伸缩臂;3—大伸缩臂;4—主梁;
1.2变幅机构
变幅结构采用了曲柄导杆机构[4]的原理,由3个转动副和1个移动副构成,通过摆动杆机构的摆动角实现变幅,最大变幅角度小于18°,通过液压缸推动撑杆,撑杆转动带动滑块滑动,滑块与撑杆间为铰链连接,可相对转动。整个变幅动作完成时间不大于8 s,变幅机构如图2所示。
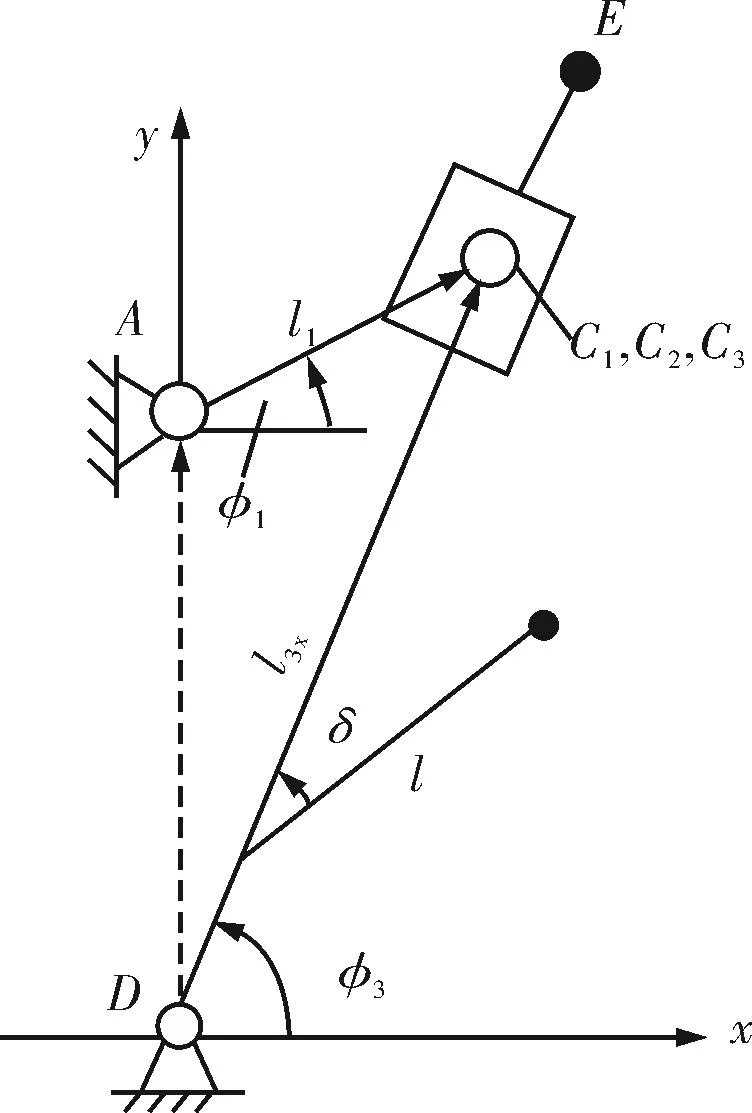
a 曲柄导杆机构
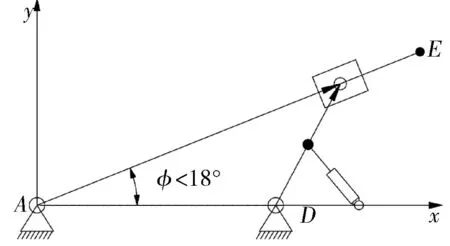
b 钻具输送装置机构
1.3伸缩臂机构
伸缩臂为2层方管结构(如图3),通过2个液缸实现单独伸缩,为了防止小伸缩臂的管线在大伸缩臂内部移动造成摩擦,将小伸缩臂液缸倒置安装,将管线从小伸缩臂前端引出并通过拖链引导。而大伸缩臂液缸通过后侧的引出,再从主梁的开口处引出并通过拖链引导。通过优化设计管线,避免了工作中对管线的磨损和挤压,提高了安全性。
1—主梁;2—大伸臂液缸;3—大伸缩臂;
1.4翻转机构
翻转机构采用了双液缸联动设计,如图4所示。翻转机构工作时,如果左侧的液缸伸出时,右侧的液缸缩回,形成1个液缸是推力、1个液缸拉力的作用状态,行程上有一定余量。这样使得翻转机构的左右翻转作用力相等,且能增大载荷能力。同样由于液缸随动,管线也安装在外侧有拖链引导,固定于主梁上,当坡道整体滑动时,不会与其他部位碰撞。

图4 翻转机构动作示意
1.5小钳子
小钳子用于夹紧钻杆接头,作用是一方面防止上升过程中掉落,另一方面承受旋扣时的反转矩,最大夹紧力时可承受12 kN·m的反转矩。小钳子由钳体、钳爪和液缸组成,钳体上有可拆卸的牙块,钳爪前端有圆周方向布置的可拆卸的牙块,2种牙块可互换。当液缸推动钳爪时,钳爪绕钳体上的转轴分别转动,向放置在钳体V形槽上的钻杆接头下压,使得钳体和钳爪上的牙块嵌入接头表面(如ø127 mm钻杆接头ø168 mm外圆[5])。由于牙块采用表面淬火处理,硬度可达55 HRC以上,因此牙板有较好的强度和耐磨性。牙块牢牢地抓住钻杆接头,实现承受反转矩的作用,完成旋扣动作。钳头采用曲线拟合设计,可兼容大部分钻具接头或者套管尺寸,钳爪的压紧力方向总是通过接头的中心线,实现3点定位,在满足转矩的前提下一直夹紧接头,小钳子夹紧不同的钻杆直径,如图5所示。
随着生活水平的提高,人们对自身健康的重视也越来越高,食品已不再仅仅满足于口味和营养,更要求其具有功能性,因此功能性食品的开发成为一大趋势[1]。黄精为百合科植物黄精、滇黄精或多花黄精的根茎,功效良多,被列为上品的滋补药,具有补气益阴、健脾、润肺、益肾之功效[2],已被国家食品药品监督管理局列为药食两用的中药,也被广泛用于功能性食品的制作中。现代研究表明,黄精具有降血压、降血脂、降血糖、防止动脉粥样硬化、延缓衰老和抗菌等作用[3]。
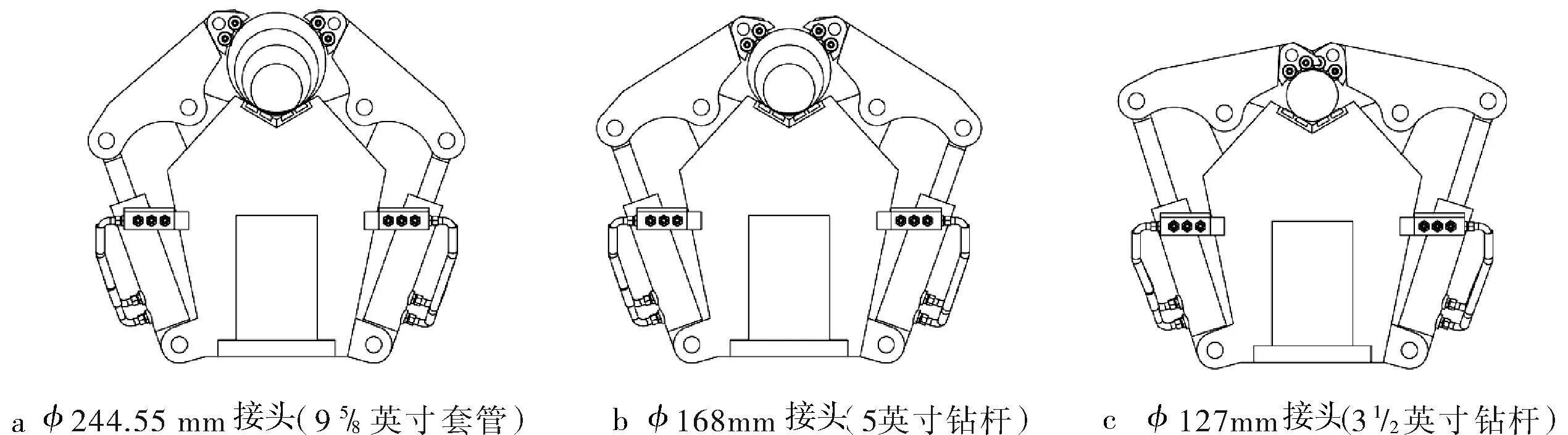
图5 小钳子夹紧不同直径钻具
1.6机械手同步回路
在装置两侧安装有机械手,负责将钻具送上和送下坡道,每1对机械手没有使用机械固连,而是安装液压同步回路。使用分流集流阀既可以使两液压缸的进油流量相等,又可使两液压缸的回油流量相等,从而实现两液压缸的往返同步[6]。液压回路如图6所示,机械手结构如图7所示。
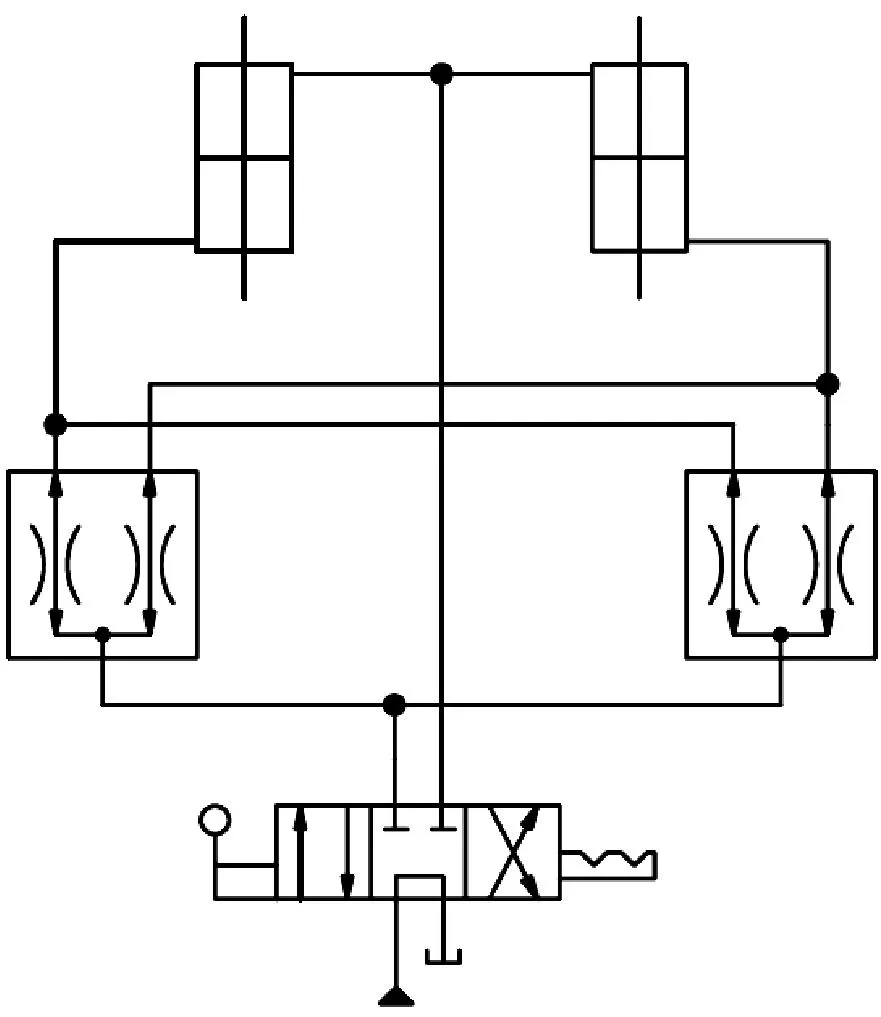
图6 分流集流阀同步回路
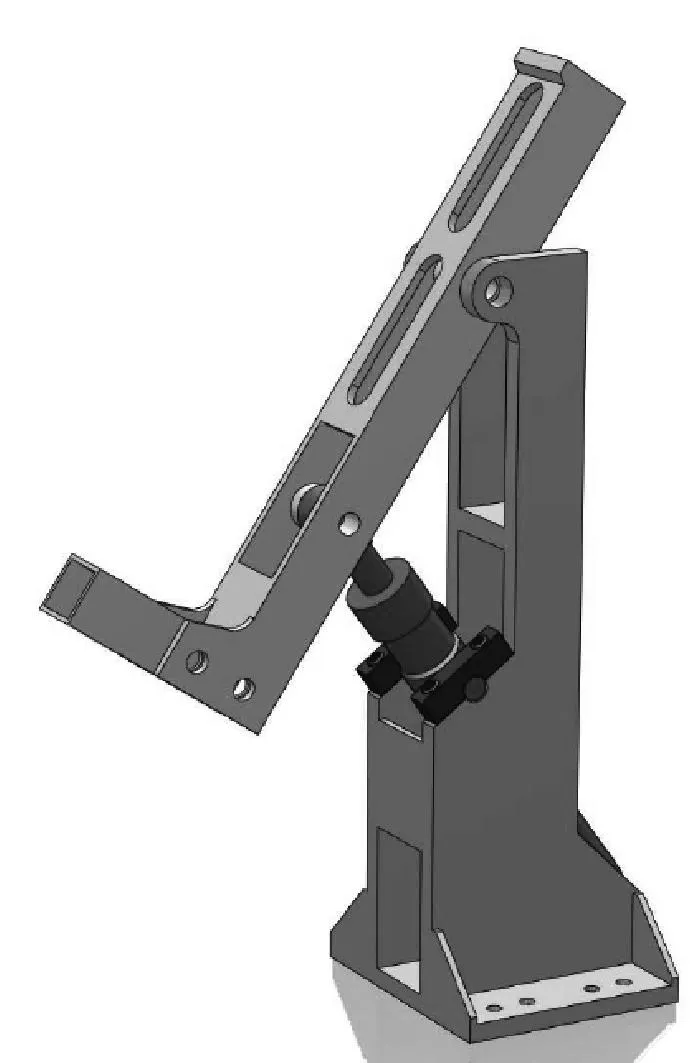
图7 机械手机构
2工作原理
2.1下钻接单根
下钻时,钻具输送装置放置在钻机的正前方,钻杆放置在钻具输送装置的左侧或者右侧。首先钻具输送装置的小伸缩臂向前伸出,为后续钻杆滚入做好准备,钻杆从通用排管架上滚向钻具输送装置,到达机械手钩杆;液压缸推动钩杆,在同步回路的控制下,钩杆同步运动,使钻杆从排管架上被钩起;随着液缸到达最大行程,钩杆上升直到上表面与水平面形成一定的角度,使钻杆能够自由滚向坡道。坡道翻转机构的V形坡道可通过内部的液缸实现左右翻转,在钩杆到达高度前,坡道转向有钻杆的左位(或右位),钻杆在重力作用下滚向坡道V板,钻杆到位后,坡道V板转向中位。小伸缩臂缩回,小钳子夹紧钻杆的接头,变幅液缸推动撑杆,撑杆一端连接有滑块,滑块在主梁下侧滑动。随着液压缸的伸长,主梁快速升起到一定高度后,顶驱的变幅液压缸推动顶驱翘起主轴,与钻具输送装置上的钻杆调整到同轴位置。此时,大伸缩臂伸出带动坡道上的钻杆一起在主梁上移动,顶驱上安装有浮动短节,用于弥补螺纹传动的位移差。钻杆接头对接后,顶驱旋转主轴正转,将螺纹旋紧,小钳子松开,通过钻机的提升系统将钻杆沿坡道V板将钻杆拉起,完成下钻接单根工作。
2.2起钻甩单根
起钻过程与下钻过程相反,钻机提升系统将钻杆提起离开卡瓦平面后,由液压大钳卸扣,顶驱旋开螺纹后,由扶正器推动钻杆翘起一定角度。此时,钻具输送装置主梁已经上升到钻台高度,小钳子打开,钻机提升系统下降,钻杆下降,由于顶驱的变幅功能,钻杆不断变化角度,并下降高度,直至被完全放置在坡道V板中。小钳子夹紧钻杆接头,顶驱反转卸开螺纹,钻杆脱离顶驱,钻具输送装置按原来的路线返回,主梁下降至最低位置,机械手翘起钩杆,小钳子松开,小伸缩臂伸出,坡道翻转至左侧(或右侧),由于坡道翻转的角度大于30°,V板的一侧会与水平面形成负角度,钻杆由于重力作用滚向机械手钩杆,钩杆的一侧有一个小的凸起,可防止钻杆滚回坡道。当机械手液缸缩回时,钩杆带动钻杆平稳放置在排管架上,坡道V板回中位,等待下一次循环完成起钻甩单根的工作。
3主要技术参数(如表1)
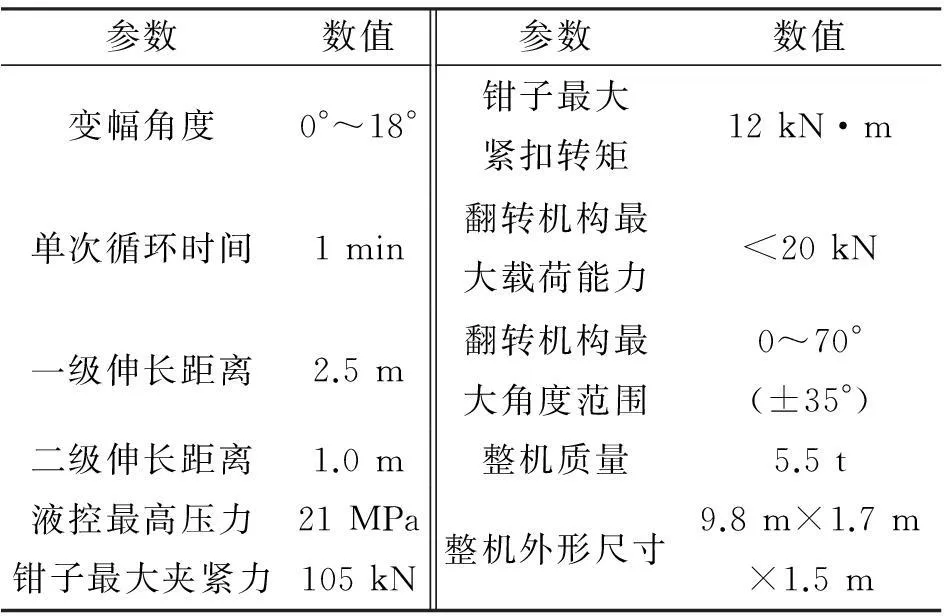
表1 主要技术参数
4创新技术
1)大小伸缩臂双层设计,可利用小伸缩臂的单独伸缩带动小钳子避让一定距离,以方便钻杆滚入坡道,还可以利用1 m长的伸缩距离来调整钻具在坡道上的位置,方便夹住接头本体;大小伸缩臂嵌套2层,并分别控制,使得小伸缩臂与大伸缩臂互相不受影响,又增大了伸长的距离;优化的管线设计使得管线的磨损降到最低。
2)小钳子自定心设计,通过拟合钳爪的移动轨迹,计算出钳爪夹紧力法线的移动轨迹,使得在钻具中心变化时,一直能够使夹紧力法线方向通过管子中心线,实现3点定位夹紧。这种设计提高了小钳子的通用性,省去了更换钳爪的步骤,为用户提供了便利,也提高了效率。
3)同步阀的应用使得两侧的机械手可用1条油路控制,不需要机械固连便可实现同步移动,举升钻杆更加平稳。
4)坡道翻转机构液缸联动设计,用2个对称布置的液缸串联油路,1个为推力,1个为拉力,实现翻转机构的翻转功能,增大了翻转机构的载荷能力,同时又没有增加原来机构的体积,结构紧凑。
5厂内试验及现场应用
1)小钳子夹紧力试验。最大紧扣转矩为12 kN·m,夹紧液缸实际油压小于15 MPa。
2)翻转机构试验。利用长9 m、直径180 mm的芯棒测试翻转载荷,最大压力17 MPa。
3)2012-12,中石油渤海钻探公司在荣盛试验1X井中采用该钻具输送装置工程机原型进行了45°斜直井钻井作业,达到了使用要求。
4)2014-10,方圆科技发展有限公司在中石油华固34-1、34-2井钻井作业中使用该装置工程机改进型,作业顺利完成,满足现场使用要求。
6结论
1)使用液压钻具输送装置改变了传统的用钢丝绳拉拽、坡道导引的模式,操作更加简便,仅需1名操作人员和1名场地工,并且大幅减轻了劳动强度,而且可在3 min内完成接单根工序,整体安装简单,大幅缩短了钻进辅助时间,提高了钻进的效率,降低了钻井附加费用[7]。
2)采用液压控制,使操作人员和场地人员远离危险源,人员安全得到保障。
3)地面井场设备的自动化程度要求越来越高,车载拖挂、自动化控制、远程遥控、全电驱动、钻机与钻具输送装置一体化等技术将是今后的研究方向。
参考文献:
[1]王军,解庆,刘金荣.煤层气勘探开发设备配套方案建议[J].石油矿场机械,2010,39(3):79-82.
[2]赵淑兰,李文彪,聂永普,等.动力猫道技术国内外现状和发展趋势[J].石油矿场机械,2010,39(2):13-15.
[3]刘文庆,崔学政,张富强.钻杆自动排放系统的发展及典型结构[J].石油矿场机械,2007,36(7):74-77.
[4]成大先.机械设计手册(第1卷)[M].北京:化学工业出版社,2007.
[5]SY/T5290—2000,石油钻杆接头[S].
[6]王益群,高殿荣.液压工程师技术手册[M].北京:化学工业出版社,2009.
[7]寇红涛,崔建春,刘海伟,等.液压动力钻杆排放猫道设计与应用[J].石油机械,2008,36(9):29-35.
Research and Development of the Hydraulic Drill Pipe Handling System
WANG Jianwei,SUN Lili,WANG Weihua,LIU Shiyan,ZHANG Ning,WU Guohui,LI Shenkui
(RongshengMachineryManufactureLtd.ofHuabeiOilfield,Renqiu062252,China)
Abstract:Due to not use the elevator and fixed catwalk on the slant drilling rig,the new equipments must be used to complete the works of the making a joint.By studying the function characteristics of the hydraulic top driver,hydraulic clamp,hoist system of the slant drilling rig,developed hydraulic pipe handling system,its function is similar to the power catwalk,and it is composed of the lifting,telescopic,rotating mechanism,little clamp,etc.The equipment can be controlled by the hydraulic,and need fewer operators,the intensity of labor is lower,the safety and efficiency are improved.
Keywords:light rig;make a joint;clamp;catwalk;hydraulic
中图分类号:TE923
文献标识码:B
doi:10.3969/j.issn.1001-3482.2016.04.019
作者简介:王建伟(1982-),男,河北任丘人,工程师,主要从事斜直井钻机设计及水下井控设备研发工作,E-mail:wjw647@163.com。
收稿日期:2015-10-20
文章编号:1001-3482(2016)04-0074-04