高垄平台滴灌带铺设机改进设计与试验
2016-05-05赵淑红刘宏俊曹秀振李天宇田伯亮杨悦乾东北农业大学工程学院哈尔滨50030东北林业大学机电工程学院哈尔滨50040
赵淑红,刘宏俊,曹秀振,周 勇,李天宇,田伯亮,杨悦乾(.东北农业大学工程学院,哈尔滨 50030;.东北林业大学机电工程学院,哈尔滨 50040)
高垄平台滴灌带铺设机改进设计与试验
赵淑红1,刘宏俊1,曹秀振1,周勇1,李天宇2,田伯亮1,杨悦乾1
(1.东北农业大学工程学院,哈尔滨150030;2.东北林业大学机电工程学院,哈尔滨150040)
摘要:针对第一代滴灌带铺设机作业速度波动时滴灌带输出量不稳定、产生堆积、缠绕,覆土动作不稳定问题,文章在原有基础上设计滴灌带输送控制机构,改进覆土轮结构和尺寸,实现高垄平台滴灌带铺设及滴灌带间隔性覆土作业,完成第二代滴灌带铺设机设计。在田间试验中,滴灌带未出现堆积、缠绕;当开沟铲入土深度为18 cm,覆土轮压力657 N,机组作业速度6 km·h(-1)时,相应覆土量727 g,覆土间隔233.8 cm,开沟宽度29.6 cm。结果表明,第二代滴灌带铺设机可完成滴灌带铺设、间隔覆土、抚垄等作业,满足实际作业需求。
关键词:高垄平台;滴灌带;铺设机;间隔覆土;输送控制
赵淑红,刘宏俊,曹秀振,等.高垄平台滴灌带铺设机改进设计与试验[J].东北农业大学学报,2016,47(3):80-85.
Zhao Shuhong,Liu Hongjun,Cao Xiuzhen,et al.Design and experiment of high-ridge platform drip tape laying machine[J].Journal of Northeast Agricultural University,2016,47(3):80-85.(in Chinese with English abstract)
我国水资源短缺,工业城市用水增加,农业用水不足且浪费严重[1-2]。滴灌是微灌技术之一,属工程节水研究范畴。高垄平台采用宽110cm大垄,垄高25~30 cm,改善土壤容重,保持水分减少对作物水蚀,达到抗旱抗涝目的。传统垄作灌溉采用沟灌技术用水浪费明显,高垄平台上滴灌可有效提高水资源利用率[3-7]。目前吕明东等研发1MG-1型膜下滴灌铺管铺膜联合作业机组将滴管带和地膜铺在垄上或洼面并在地膜两边适量覆土[8];张勇等研究表明,滴管带开沟铺埋装置实现地膜与滴管带分离[9],但并非单独滴灌带铺设机器,无法完成单独滴灌带铺设固定。
第一代滴灌带铺设机可在低速时完成滴灌带铺设、间隔覆土、抚垄等作业,但工作效率低。速度波动时,滴灌带卷筒转动惯量大,支撑轴转动过于灵活,使滴灌带卷筒快速运转后无法立即停止,导致滴灌带过多输出产生堆积、缠绕问题[10]。本文针对第一代机型加以改进,设计滴灌带输送控制机构控制滴灌带卷筒转动与停止,使滴灌带在正常输出量时能顺畅转动,采用强制导向式间隔覆土机构,无论作业速度快慢,均能强制完成覆土作业。
1 高垄平台滴灌带铺设机结构设计
1.1整体结构
高垄平台滴灌带铺设机整体结构[11-12]如图1。主要有松土铲、机架、滴灌带悬挂机构、输送控制机构、滴灌带导向轮、间隔式覆土机构等组成。性能技术参数如表1。

图1 高垄平台滴灌带铺设机结构Fig.1 Schematic of high ridge platform drip tape laying machine

表1 整机技术参数Table 1 Technical parameters of machine
1.2工作原理
机器前部松土铲为间隔覆土轮覆土作业提供隆起松土,使滴灌带铺设于松土铲开出沟内。采用强制导向式间隔覆土机构,将抓土、放土动作改为推土,无论作业速度快慢,覆土动作均按设计完成,克服原有机型高速作业时无法完成规定覆土动作弊端。滴灌带输送控制机构控制滴灌带卷筒转动与停止,使滴灌带在正常输出量时顺畅转动。
2 高垄平台滴灌带铺设机关键部件设计
2.1间隔式覆土机构设计
间隔式覆土机构采用平面地轮加外边缘限位环,在地轮圆周上加装自动推土机构,该机构主要由导向装置和自动推土机构组成(如图2所示)。
2.1.1导向装置设计
导向装置由平行四杆仿形导向板构成,导向板对称安装在覆土轮两侧,组成开口大、闭口小导向结构,完成对推土板由开启到闭合状态导向。导向机构不但随覆土轮上下而同步运动,且在运动时与地面保持角度不变。利用平行四杆仿形功能,由水平机架与覆土轮斜拉杆作为平行四杆相邻两边,斜拉杆与覆土轮铰接点为平行四杆第二个铰接点,构造平行四连杆机构,将导向架安装于平行四杆机构下端杆上,覆土轮上下运动时,四杆机构下拉杆始终与覆土轮相对位置保持不变[13],使导向机构满足预期要求,如图2所示。
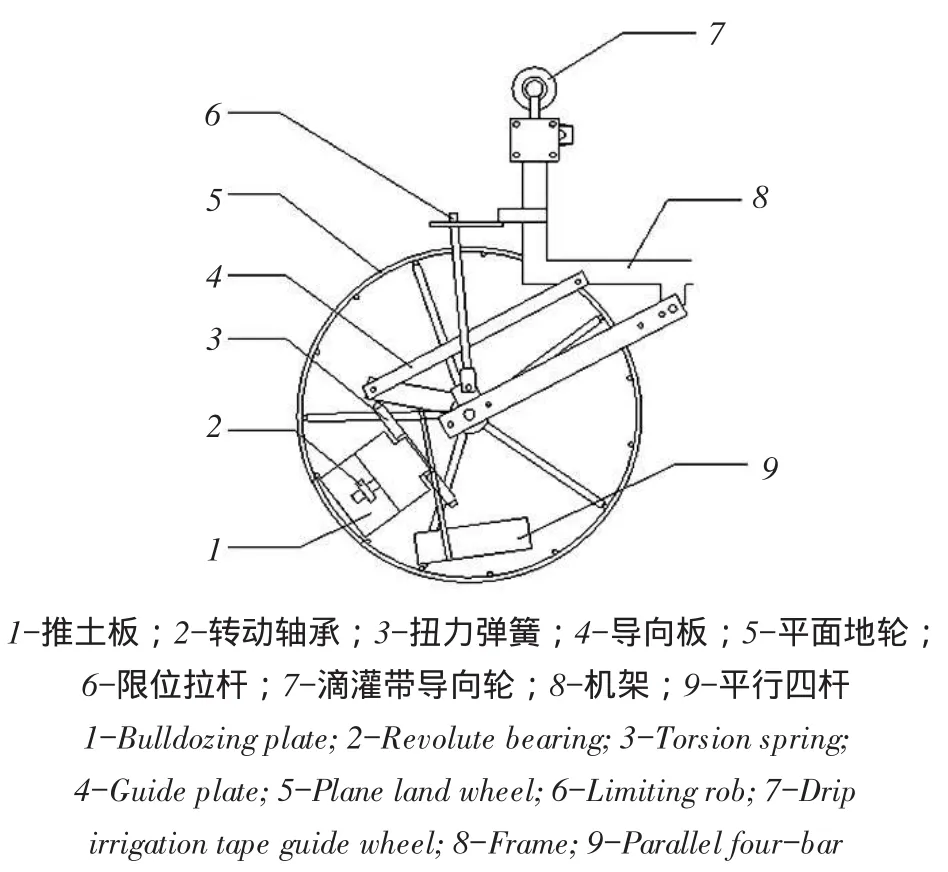
图2 间隔式覆土机构Fig.2 Schematic of intermittent soil structure
2.1.2自动推土机构设计及工作原理
在分土铲作用下土壤颗粒间出现相对位移,分土铲对土壤造成接近二项应力破坏,土壤利用自身抗剪强度阻止这种破坏形式,土壤剪切强度根据摩尔——库伦定律建立数学表达式可知:
τf=c+σ·tgφ(1)
式中,τf-剪切破坏面上剪应力,即土抗剪强度(KPa);c-土壤粘聚力,对于无粘性土壤其为零(KPa);σ-破坏面上法向应力(KPa);φ-土内摩擦角(°)。
由公式(1)可知应力与剪应力间存在线性关系,间隔覆土板作业前土壤已细化,推土板作业土壤颗粒大小及土壤湿度适中,推土板所受正压阻力较小,故采用薄板折弯结构。
两推土板通过转动轴与覆土轮体连接,在扭力弹簧作用下处于张开状态。当推土板随轮体转动接触土壤时,在土壤阻力作用下,推土板外边缘部分进入土中,由于松土铲在轮体两侧形成隆起土带,推土板在通过导向装置时,自身闭合,将土聚拢到轮体下滴灌带上。推土板通过导向装置后,在扭力弹簧作用下,又回到张开状态。将转动轴承安装在推土板外侧,随推土板进入导向板时自由转动,减少推土板导向过程阻力。平面地轮将滴灌带压于土壤表面,使滴灌带紧贴地面,防止覆于滴灌带土壤弹掉。
2.1.3间隔覆土轮设计
间隔覆土防风袭能力取决于覆土间隔及单次覆土量。在一定范围内,两者呈反比关系。现行人工间隔覆土间距为5 m,而此机构覆土量要小于人工覆土量,由于覆土间隔由未覆土长度和覆土长度组成,因而选取未覆土长度L=2 m;保证覆土间隔小于5 m。覆土间隔与覆土轮直径关系为:
J=π·D(2)
式中,J-覆土间隔(mm);D-间隔覆土轮直径(mm)。
覆于滴灌带上土壤应在滴灌带注水后靠水对滴灌带张力作用而滑下滴灌带,防止堵塞滴灌带,所以滴灌带覆土量不宜过大,取V=5× 105mm3。被推土板覆在滴灌带上土壤类似圆锥形状,可近似用锥体体积公式求覆土半径,得到覆土长度,圆锥体体积公式为:

式中,r-覆土半径(mm);h-覆土堆体高度(mm)。

式中,φ-土壤内摩擦角(°)。
由式(3)和(4)整理可得:

取φ=20°、V=5×105mm3代入式(5)得r=111.8mm。

式中,L-末次覆土长度(mm)。
由式(2)、式(6)整理可得:

将L=2 000 mm、r=111.8 mm代入式(7)得直径D=708.2 mm,取整为700 mm。
根据高垄平台特点,取轮宽b为90 mm(如图3所示)。
2.2滴灌带输送控制机构设计
机构主要由转动控制轮、制动杆组、制动圈等组成,如图4所示。
转动控制轮为可绕轴转动长形双杆架,工作时滴灌带交替绕过控制轮上下两杆。制动杆组由固定于机架制动杆和连接在控制轮转动轴上拨杆组成。制动杆在扭力弹簧作用下处于对制动盘常制动状态,制动盘通过滴灌带卷筒转动轴制约滴灌带卷筒,使其处于静止状态。拨杆转动时推动制动杆使制动杆与制动圈分离,消除制动作用。静止时,拨杆在自身重力作用下不对制动杆产生作用。作业时,机器行走拉伸滴灌带,交替绕过控制轮滴灌带使控制轮转动,带动拨杆转动,此时拨杆推动制动杆转动,使制动杆脱离制动盘,滴灌带卷筒脱离制动装置约束,实现灵活转动。
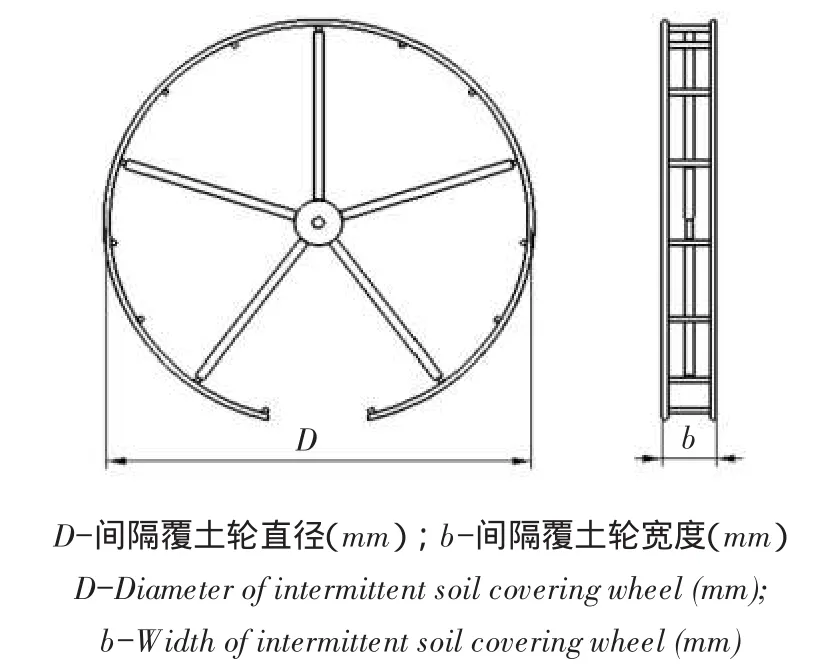
图3 间隔覆土轮机构Fig.3 Schematic of intermittent soil wheel structure
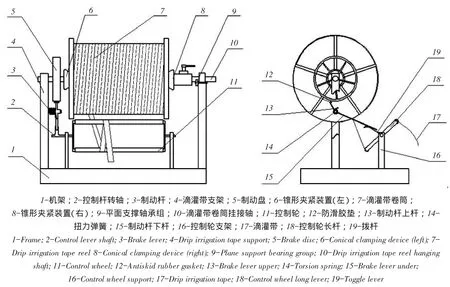
图4 滴灌带输送控制机构Fig.4 Schematic of drip tape transport control mechanism
通过输送控制机构作用,当滴灌带输出过多而产生松弛状态时,控制轮因滴灌带作用力减小而重新回到原始状态,脱离制动杆,使制动杆通过扭力弹簧重新作用于制动盘,限制滴灌带卷筒
转动,避免滴灌带输出过多[14]。
3 试验结果与分析
3.1地点
东北农业大学香坊实验实习基地,土壤坚实度为4.78kg·cm-2(0~5cm),7.25kg·cm-2(5~10cm),土壤含水率为22.34%,垄高30 cm,垄宽110 cm。
3.2设备及仪器
高垄平台滴灌带铺设机,TZS-1型土壤水分速测仪,TYD-2型土壤硬度计,JD1000-2电子天平,皮尺(量程:30 m;精度:1 mm),直尺(量程:0.3 m;精度:1 mm)。
3.3方法
采用三因素五水平正交试验设计,以机组作业速度A、松土铲入土深度B、间隔覆土轮体所受压力C作影响因素,以单次覆土量、覆土间隔、开沟宽度作响应指标,选用L25(56)正交表[15]。试验方案及结果见表2。
3.4结果分析
通过对试验结果极差分析,得出因素A、B、C对试验指标单次覆土量、每段覆土间距及开沟宽度最优水平,影响程度及优化组合,见表3。
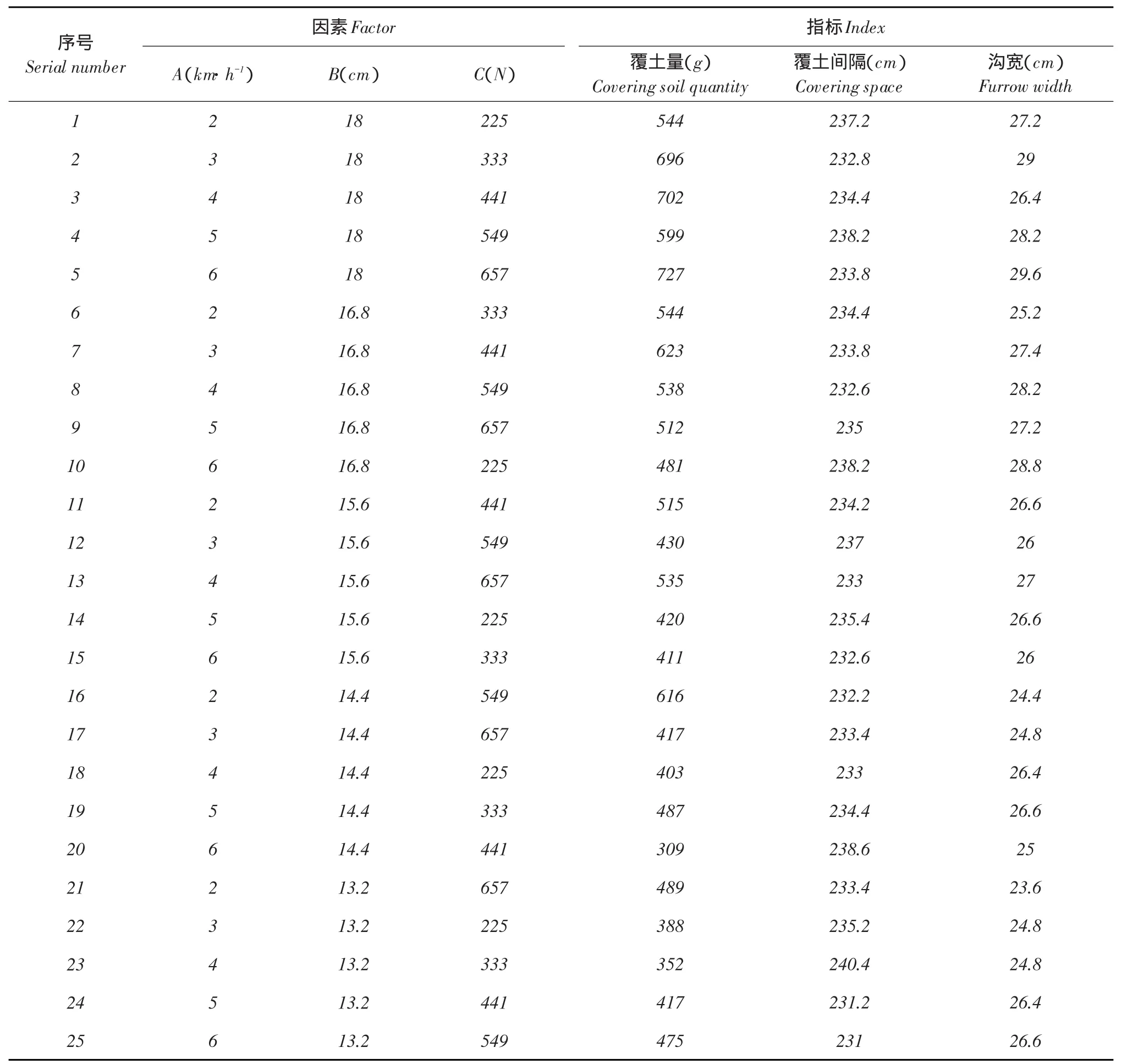
表2 试验方案及结果Table 2 Testing program and results

表3 极差分析Table 3 Range analysis
对于覆土量:B影响最大,各因素影响主次顺序为B>C>A,最优组合为B1C5A1,即开沟铲入土深度为18 cm,覆土轮压力为657 N,机组作业速度为2 km·h-1。对于覆土间距:C影响最大,各因素影响主次顺序为C>B>A,最优组合为C5B5A1,即覆土轮压力为657 N,开沟铲入土深度为13.2 cm,机组作业素为2 km·h-1。对于开沟宽度:B影响最大,各因素影响主次顺序为B>A>C,最优组合为B5A1C2,即开沟铲入土深度为13.2 cm,机组作业速度为2 km·h-1,覆土轮压力为333 N。
覆土量是影响作业效果主要指标,因素B是影响覆土量主要因素,但对覆土间距及开沟宽度影响相对不大,选用B1(开沟铲入土深度为18cm)。因素C是覆土间距主要因素,是开沟宽度次要因素,因此选用C5,即覆土轮压力为657 N。因素A在各相应指标中并非主要因素,考虑其对各指标影响不大,作业速度过低影响作业效率,故选用A5(机组作业速度为6 km·h-1)。由此得出,最优组合为B1C5A5,试验方案中包含该组合,可知覆土量为727 g,覆土间距为233.8 cm,开沟宽度为29.6 cm,各项指标满足优化要求,滴灌带铺设后效果见图5。
在试验过程中,滴灌带无堆积现象,说明滴灌带输送控制机构可消除作业期间速度波动影响,停车时滴灌带卷筒可即时制动,有效消除滴灌带堆积、缠绕现象。滴灌带在作业时无脱离现象,说明各轮体结构设计合理,与滴灌带配合紧密,工作可靠。

图5 滴灌带铺设后效果Fig.5 Effects after laying drip tape
4 结 论
a.改进第一代高垄平台滴灌带铺设机,设计强制导向式间隔覆土机构及滴灌带输送控制机构。
b.该机作业时,能有效控制停车引起滴灌带过剩输出而产生堆积、缠绕。
c.通过试验得出,各影响因素最优组合覆土量为727 g,覆土间距为233.8 cm,开沟宽度为29.6 cm。改进后铺设机可满足单独铺设滴灌带作业要求,为节水灌溉提供配套。
[参考文献]
[1]中国灌溉排水发展中心水利部农村水利司.农业节水发展战略研究[M].北京:水利水电出版社,2006.
[2]吴普特,冯浩,牛文全,等.中国用水结构发展态势与节水对策分析[J].农业工程学报,2003,19(1):1-6.
[3]楼豫红,康绍忠,崔宁博,等.四川省灌溉管理节水发展水平综合评价模型构建与应用[J].农业工程学报,2014,30(4):79-89.
[4]康绍忠,蔡焕杰,冯绍元.现代农业与生态节水技术创新与未来研究重点[J].农业工程学报,2004,20(1):1-6.
[5]郑耀泉,李光永,党平,等.喷灌与微灌设备[M].北京:水利水电出版社,1998.
[6]孙先明,孙锦秀,王春华.微灌带发展研究现状及前景[J].农机化研究,2006(3):33-34.
[7]张振华,蔡焕杰,郭永昌,等.滴灌土壤湿润体影响因素实验研究[J].农业工程学报,2002,18(2):17-20.
[8]吕明东,邢丹,刘洪发,等.1MG—1型膜下滴灌铺管铺膜联合作业机组的研究与设计[C].科技创新与节能减排——吉林省第五届科学技术学术年会论文集(下册),2008.
[9]张勇.滴灌带开沟铺埋装置设计[J].新疆农机化,2010(5):7-8.
[10]田佰亮,杨悦乾,赵淑红,等.高垄平台滴灌带铺设机设计与试验[J].农机化研究,2013,35(2):69-72.
[11]李宝筏.农业机械学[M].北京:中国农业出版社,2003.
[12]田佰亮.高垄平台滴灌带铺设机研究与试验[D].哈尔滨:东北农业大学,2014.
[13]韩豹,蒋亦元,吴文福.倒伏超级稻割前摘脱台试验[J].农业工程学报,2011,27(6):90-94.
[14]赵淑红,杨悦乾,田伯亮.滴灌带铺设机输送控制机构:中国,0031037.6[P].2015-01-21.
[15]王万中,茆诗松.试验设计与分析[M].上海:华东师范大学出版社,2004.
Design and experiment of high- ridge platform drip tape laying machine
ZHAO Shuhong1,LIU Hongjun1,CAO Xiuzhen1,ZHOU Yong1,LI Tianyu2,TIAN Bailiang1,YANG Yueqian1(1.School of Engineering,Northeast Agricultural University,Harbin 150030,China; 2.School of Mechanical and Electrical Engineering,Northeast Forestry University,Harbin 150040,China )
Abstract:Aimed at the first generation of drip irrigation laying machine work with the problem of output instability,accumulation,as well as winding.On the basis of the original structure the article improves the wheel turned the soil and size.Drip belt control mechanism was designed.This mechanism implements on the high-ridge platform after the laying of drip irrigation belt and laying of drip irrigation belt for intermittent covering soil.The design of the second generation of drip tape laying machine was completed.The field experiment was carried out,when the trenching shovel of soil depth of 18 cm,wheel turns the soil pressure was 657 N,the unit operation speed of 6 km·h(-1),the prototype can work normally,the covering soil quantity was 727 g,the covering spacing was 233.8 cm,furrow width was 29.6 cm.Experimental results showed that this machine could complete the laying of drip irrigation belt,intermittent covering soil and caresses ridge under the condition of high- speed.This machine could meet the demands of practical work.
Key words:high-ridge platform; laying machine; intermittent covering soil; transmission control; drip tape
作者简介:赵淑红(1969-),女,教授,博士,博士生导师,研究方向为田间农业机械。E-mail:shhzh091@sina.com
基金项目:“十二五”国家科技支撑计划项目(2014BAD11B01)
收稿日期:2015-11-03
中图分类号:S277.95
文献标志码:A
文章编号:1005-9369(2016)03-0080-06
