面向振动响应特性的坐姿人体动力学模型
2016-04-15张志飞胡正权徐中明贺岩松黄深荣
张志飞, 胡正权, 徐中明, 贺岩松, 黄深荣
(1.重庆大学 机械传动国家重点实验室,重庆 400030; 2.重庆大学 汽车工程学院,重庆 400030)
面向振动响应特性的坐姿人体动力学模型
张志飞1,2, 胡正权2, 徐中明1,2, 贺岩松2, 黄深荣2
(1.重庆大学 机械传动国家重点实验室,重庆400030; 2.重庆大学 汽车工程学院,重庆400030)
摘要:为了能准确地模拟人体的振动响应特性,并减少模型的复杂程度,结合分析力学和人体各部位实际状况,建立了六自由度坐姿人体动力学模型。列出了该模型的运动微分方程,并推导出人体振动响应特性的计算公式,以试验数据为依据,以动态等效质量和座位处到头部传递函数为目标,运用多目标优化方法获得了模型参数。结果显示,六自由度模型能准确的拟合人体振动响应特性曲线。将该模型与经典的集中参数模型(ISO 5982(2001)模型)和复杂生物力学模型(Tae-Hyeong Kim的模型)进行对比分析,该模型能更好地拟合试验数据,其结构简单却能相对完整、准确地反映人体动态特性,可用于人体振动响应仿真分析。
关键词:人体动力学模型;全身振动;动态等效质量;传递函数;参数识别
振动会使人体感到不舒适、疲劳,甚至对人体造成损伤,坐姿时,人体对低频(5 Hz左右)激励引起的全身振动尤为敏感[1-2]。因此,人体在低频垂向振动激励下的动态响应特性受到了学者们的格外关注。广泛用于描述人体振动响应特性的参数有臀部到头部的传递函数、动态等效质量[3]。
为了能分析、预测和改善人体振动,或者研究机动车满足特定平顺性条件下的机动性能[4],需要建立合理的人体动力学模型来预测人体关键部位的振动响应[5]。在大量试验结果的基础上,国内外学者们建立了多种动力学模型来描述人体的振动响应特性。Coermann[6]就通过测试坐姿时驱动点机械阻抗建立了一自由度模型。ISO 7962建立了面向臀部到头部传递函数的四自由度坐姿人体模型[7]。ISO 5982基于动态等效质量建立了三自由度坐姿人体模型[8]。张鄂等[9]建立了串联四自由度坐姿人体垂向动力学模型。但上述模型对人体过于简化,只考虑身体各部位的垂向振动,在模拟座位处到头部传递函数时精度不是很高。为能更好地模拟人体各部位的振动响应,学者们建立了很多基于生物力学的复杂模型,Cho等[10]基于座椅到臀部、背部和头部传递函数建立了九自由度多体动力学模型;Kim等[11]建立了五自由度人体模型,能同时拟合垂向和水平方向的动态等效质量;Kim等[12]基于动态等效质量和臀部到头部传递函数建立了多自由度坐姿人体模型。颜璘娟等[13]建立了坐姿人体2维有限元模型以反映人体生物力学响应。李晓玲等[14]运用Adams/LifeMode软件建立了坐姿人体多体动力学模型,用于振动舒适性的研究。这些模型虽能反映人体多个部位多个方向的运动信息,但结构复杂、不易仿真,并且对试验数据的拟合度不高。
为了建立结构简单、自由度少却能如复杂的生物力学模型一样,能相对完整、准确地表达人体动态特性的人体动力学模型,尝试将集中参数建模方法与多体动力学相结合,建立能同时反映人体动态等效质量和座椅到头部传递特性的多自由度坐姿人体模型。根据模型的运动方程推导振动响应特性的计算公式,并运用多目标优化方法拟合实验数据获得模型参数,最后通过与ISO 5982 (2001)模型和Tae-Hyeong Kim的模型对比来分析模型的准确性。
1人体振动响应特性及人体动力学模型
人体处于坐姿时,激励坐骨节点(座椅面与臀部的接触点)和大腿的振动会通过全身各个部分传递到头部。并且坐骨节点处、头部的振动是影响舒适性和产生视觉障碍的重要因素。因此可以用座椅面到头部的振动传递函数、动态等效质量等来描述人体对振动动态响应特性。最常用的表明人体振动响应特性的参数是驱动点动态等效质量、臀部到头部传递函数,ISO 5982(2001)对其的定义如下:
垂向动态等效质量是人体振动输入点垂向的驱动力(F)与垂向加速度(a)的拉普拉斯变换之比,表示为:
(1)
座椅面到头部的垂向振动传递函数,通常采用头部垂向加速度(ahead)与座椅面与臀部接触点的垂向振动加速度(aseat)的拉普拉斯变换之比来表示:
(2)
为了更加全面的描述人体动态响应特性,文献[12]定义了座椅面到人体头部旋转振动传递函数如下:
(3)

坐姿人体可以用集中质量、线型或扭转弹簧以及阻尼器、衬套、以及运动副(多体动力学模型)组成的机械系统来建模,以反映人体振动响应特性,但模型的结构形式有多种。图1为ISO 5928(2001)给出的基于动态等效质量的三自由度模型,是应用较广泛的人体模型,其结构并不与真实人体结构对应,只是假设m0代表坐姿时座椅对人体的振动输入点,m2代表头部,除此以外模型中其它质量、刚度和阻尼并不对应实际的人体结构。图2是Kim建立的多自由度模型,其结构与实际人体结构相对应,因此是较为接近真实人体结构的模型。模型中的弹簧、阻尼器和衬套模拟肌肉组织或关节处的刚度和阻尼特性,因此模型较为复杂。


图1 ISO5982模型Fig.1AmodelofISO5982图2 Kim的模型Fig.2AmodelofKim
2六自由度人体动力学模型
2.1模型的建立
人体在受到外界干扰后会处于非平衡状态,人体重心会偏离初始位置[15]。然而人体通过前庭、视觉、本体感受器来感知这些变化信息,并刺激中枢神经作出相应的应激反射,使肌肉产生恢复力以恢复重心位置[16]。坐姿人体受到外界激励时,会有意识的控制上体以保持坐姿。为了使模型更接近人体运动的真实情况,应在模型中考虑到这种因素。虽然这种神经调节机制复杂,但可以通过弹簧和阻尼来简化模拟重心偏离平衡位置时肌肉产生的恢复力和阻尼力[17-18]。
综合上述研究,提出如图3所示的六自由度坐姿人体模型。m0代表座椅对人体振动输入点;m1及m5分别代表臀部和大腿;m4代表内人体脏质量;m2代表人体背部质量,J2代表背部绕O1点的转动惯量;m1与m2通过旋转铰相连;m3代表颈部质量;m6代表头部质量,J6代表头部绕O2点的转动惯量。假想的墙体(左侧斜线)与k2、c2组成的弹簧阻尼系统代表人体为保持坐姿而产生回复力的机制。模型中其余各弹簧和阻尼代表了肌肉组织或关节处刚度和阻尼特性。e2代表背部质心位置到O1点的距离,α代表背部质心与O1点连线偏离垂向的角度。e2代表头部质心到O2点的距离,β代表头部质心与O2点连线偏离水平方向的角度。

图3 六自由度模型Fig.3 A six degree-of-freedom model
在该模型中,并不要求模型与真实人体严格对应,只要求能反映人体关键部位的动力学特性,否则模型将异常复杂。为了简便,忽略侧向振动的影响,假设模型中的刚度和阻尼都是线性的,m2只向m3传递垂向振动,k2、c2可沿墙壁滑动,忽略摩擦力影响。选取各刚体偏离静平衡位置的位移和转角为广义自由度,即m2具有绕O1点的旋转自由度θ2,m6具有绕O2点的旋转自由度θ6,取顺时针方向为正,其它质量块只具有偏离其静平衡位置的垂向移动自由度,取向上为正,z0为激励位移。
2.2六自由度模型运动方程及振动响应特性
在静平衡位置运用牛顿第二定律和力矩平衡原理建立的系统运动方程如下:
经过拉普拉斯变换并整理,
(m3s2+m6s2+c3s+k3)z3(s)-
(c3s+k3)z1(s)-esinα(c3s+k3)θ(s)+
m6e6cosβ·θ6(s)=0
esinα(c3s+k3)z3(s)+esinα(m2s2-
c3s-k3)z1(s)+[Js2-e2sin2α(c3s+k3)+
e2cos2αc2s+e2cos2αk2+
m2s2e2sin2α+m2s2e2cos2α]θ(s)=0
(m4s2+c4s+k4)z4(s)-(c4s+k4)z1(s)=0
m4s2z4(s)+(m1s2+m2s2+c1s+k1)z1(s)+
m2s2esinαθ(s)-(c1s+k1)z0(s)=0
(m5s2+c5s+k5)z5(s)-(c5s+k5)z0(s)=0
m6s2e6cosβ·z3(s)=0
令:
A=m3s2+m6s2+c3s+k3,
B=c3s+k3,
C=e2sinα(c3s+k3),
D=m6s2e6cosβ,
E=e2sinα(m3s2-c3s-k3),


G=m4s2+c4s+k4,
H=c4s+k4,I=m4s2,K=m1s2+m2s2+c1s+k1,
L=m2s2e2sinα,
M=c1s+k1,N=m5s2+c5s+k5,P=c5s+k5,

R=m6s2e6cosβ
求得:





座椅面垂直振动到头部垂直振动的传递函数可由下式计算:
(4)
座椅面垂直振动到头部旋转振动的传递函数可由下式计算:
(5)
模型受垂向力为:
(6)
则模型垂向动态等效质量为:
(7)
3六自由度模型参数识别
3.1参数识别方法
文献[10]对5位成年男性进行测试,得到在0.5~20 Hz频带内头部传递函数数据和垂向动态等效质量数据的平均值,如图4所示。其中,图4(a)为垂向动态等效质量幅值,图4(b)为垂向动态等效质量相位,图4(c)为座椅面到头部垂向振动传递率,图4(d)为座椅面到头部旋转振动传递率。利用座椅到头部传递函数和垂向动态等效质量的表达式,以此试验数据为基准,对模型参数进行识别。

图4 人体振动响应特性试验数据Fig.4 Test data of human dynamical response
为了拟合实验数据,运用最小二乘的原理建立的4个目标函数如下:
(8)
式中,Me、φe、He、Hβe分别为试验获得的动态等效质量幅值、相位和座椅面到头部振动传递率。Mm、φm、Hheadm、Hβm分别为模型动态等效质量幅值、动态等效质量相位、座椅面到头部垂向振动传递率和座椅面到头部旋转振动传递率,计算公式为:
(9)
(10)
(11)
(12)
采用Matlab与Isight联合仿真的方法建立使I1、I2、I3、I4同时最小为目标的多目标优化模型。由于各目标直接存在复杂的制约关系,几乎不可能得到使它们同时最小的最优解。所以,在解决多目标优化问题时,就必须对各性能指标进行综合评定,以确定出最优方案。在最优方案里,并不一定是所有的目标值都能达到该性能指标的最优。于是,出现了Pareto最优解(集)的概念。多目标优化问题实际上就是求解该问题的Pareto最优解集。利用Isight中的多目标遗传优化算法,可计算出不同权重组合下的最优方案,这些最优方案的集合就是Pareto最优解集。
利用Isight的多目标优化问题Pareto最优解集的专用后处理工具工程数据挖掘(Engineering Data Mining,EDM),可以动态显示设计变量的变化和优化目标的响应,根据对各个分目标的权衡,找到最合适的折衷解。
3.2参数识别结果及对比分析
采用NSGA-II算法,经过计算并利用EDM工具得到变量变化和优化目标响应图,如图5所示。图中上部各条曲线代表不同权重下的Pareto最优解,下部为对应优化目标响应,因此可以根据此图来选择最终的优化结果。
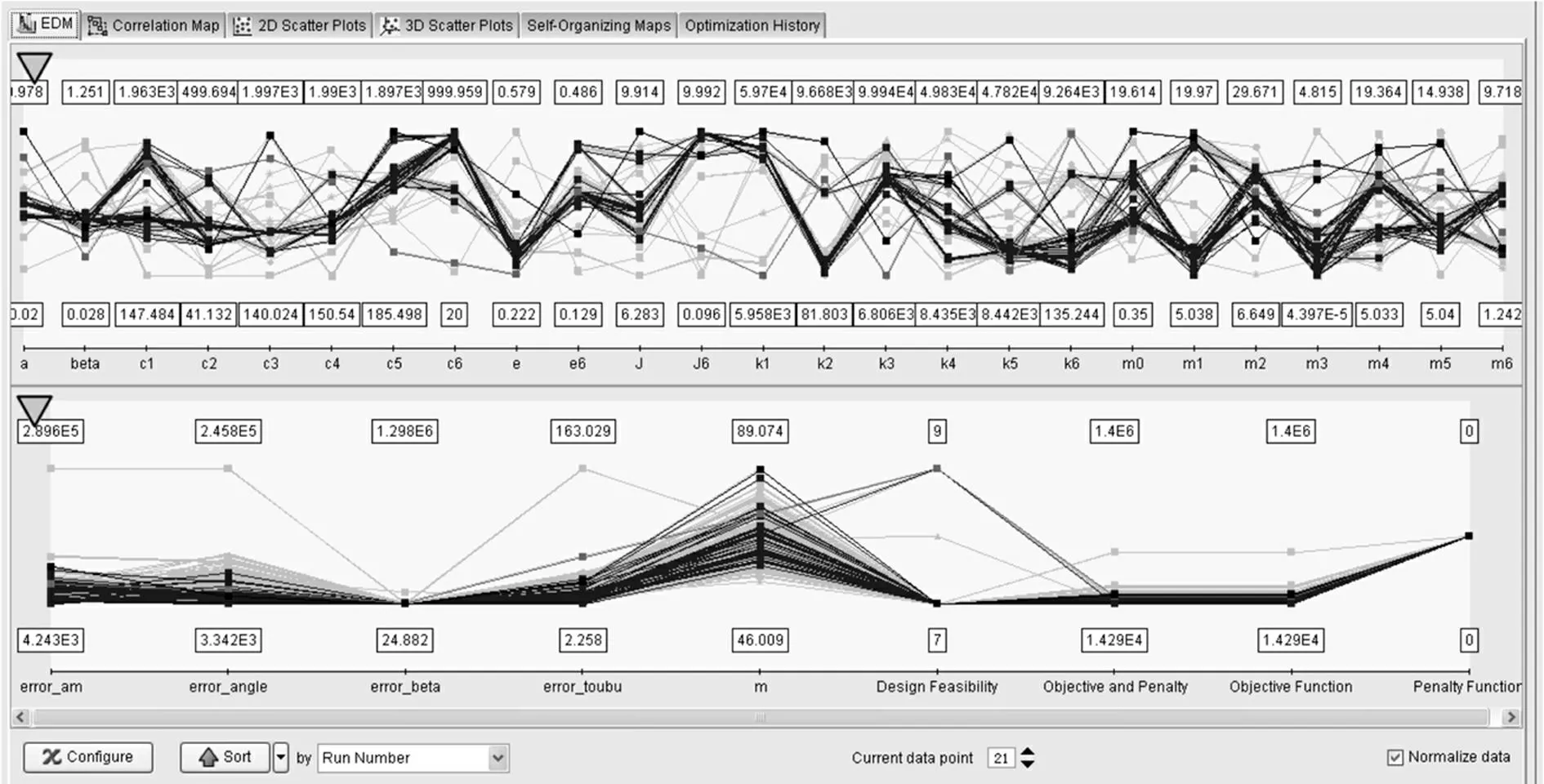
图5 变量的变化和优化目标的响应Fig.5 Variables and objectives responses
通过对Pareto最优解集的分析和权衡,最终取权重为I1∶I2∶I3∶I4=1∶1∶1∶1,即尽量同等照顾所有目标,得到的结果如表1所示。
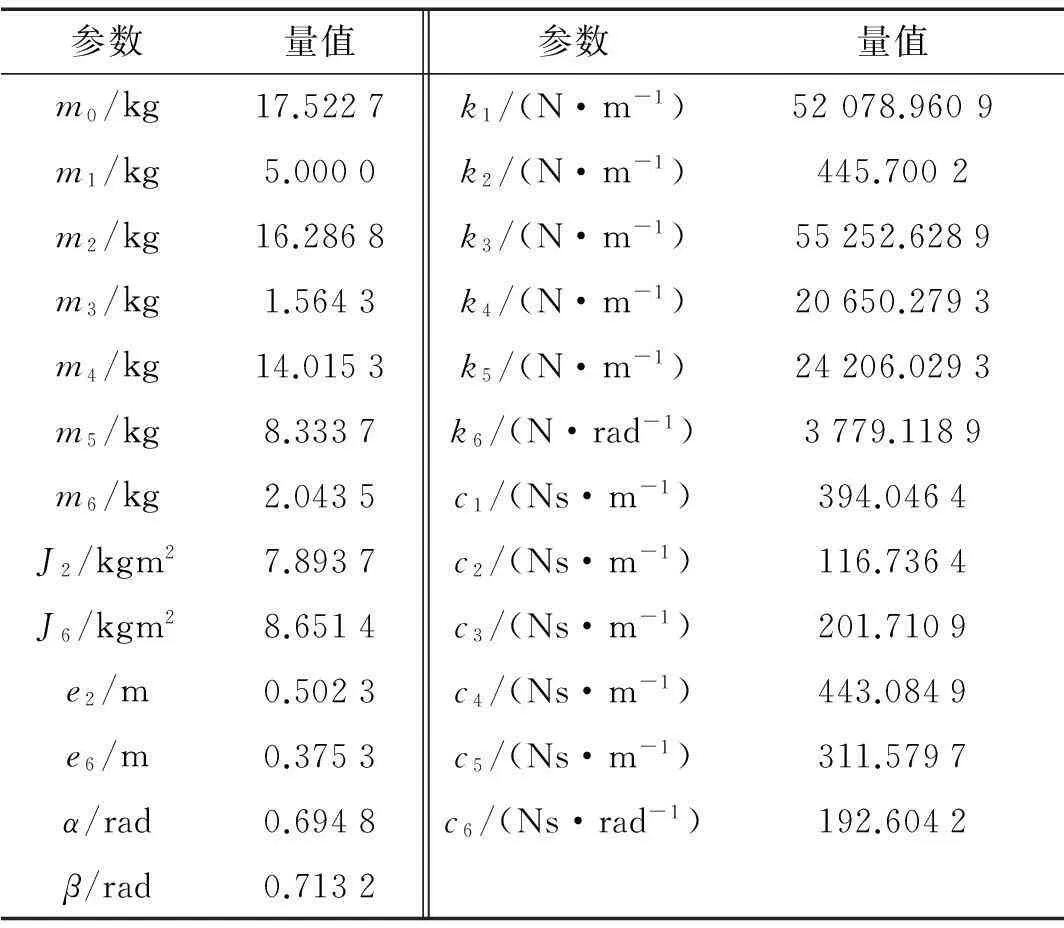
表1 六自由度模型参数表
将表1的参数代入六自由度模型,可求得该模型频率范围为0.5~20 Hz时,各振动响应特性的理论值。为了检测模型的合理性,将其与Kim的模型和ISO 5982模型的振动响应特性进行对比。图6为各模型的动态等效质量幅值,图 7为各模型动态等效相位,图8为各模型座椅面到头部垂向振动传递率,图9为各模型座椅面到头部旋转振动传递率。
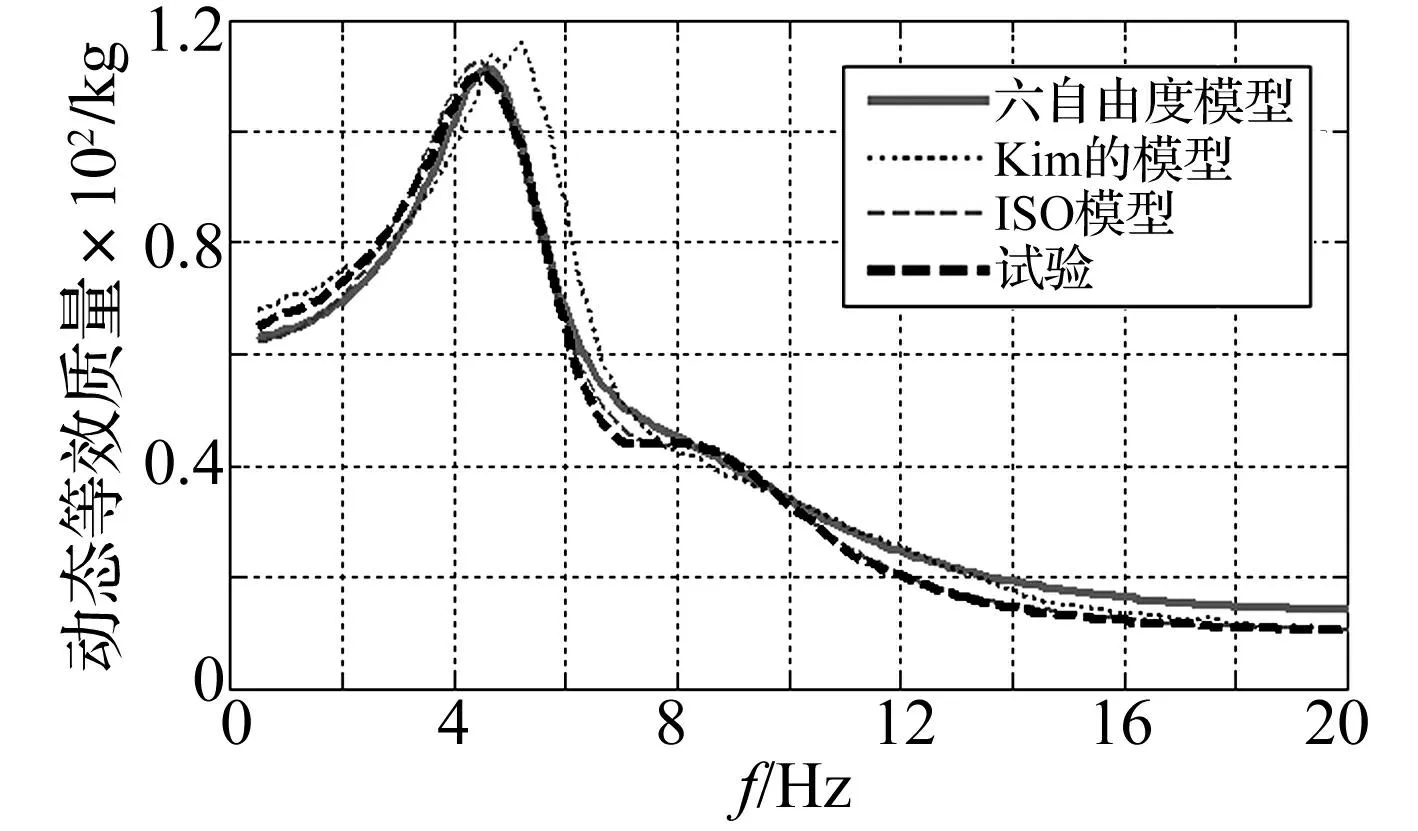
图6 各模型动态等效质量幅值对比Fig.6 Apparent mass amplitude of each model
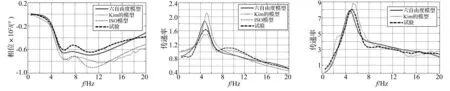

图7 各模型动态等效质量相位对比Fig.7Apparentmassphaseofeachmodel图8 各模型座椅面到头部垂向振动传递率对比Fig.8Seattoheadtransmissibilityofeachmodel图9 各模型座椅面到头部旋转振动传递率对比Fig.9Seattoheadrotationtransmissibilityofeachmodel
由图6~图9可以看出,六自由度模型同其它模型一样,各动态特性都能在较大范围内与实验曲线一致,说明所建立的模型是合理的。
·文化定位策略。文化定位是将文化与品牌特征联系起来,为品牌注入文化内涵,形成文化上的品牌差异。这种文化可以是图书馆自身的文化、校园文化、城市文化特色、地域文化等。2015年俄罗斯政府的阅读推广项目“2015 俄罗斯联邦文学年”的品牌选择了3 位享誉世界的俄罗斯作家头像剪影作为徽标,并采用了俄罗斯国旗红蓝白3 种具有象征意味的颜色,充分体现了俄罗斯独特的文化意蕴。因而,文化定位不仅可以大大提高品牌品位,还可以使品牌形象独具特色,获得读者的心理认同。

吻合度的计算公式为[19]:
(13)

拟合优度的计算公式为:
(14)
(15)

由表2和表3可见,由于ISO模型是单纯的基于动态等效质量而建立的模型,因此它在对动态等效质量的拟合上较其它更具优势,但其它方面都不如另外两个模型,甚至不能表达座椅面到头部旋转振动传递函数信息。六自由度模型能同Kim的模型一样,能表达相对完整的人体动态特性信息,并且整体上拟合效果都明显好于其它模型。

表2 各模型的吻合度值对比

表3 各模型的拟合优度对比
上述对比分析表明,所建立的六自由度模型准确合理,能够以较少的自由度表达人体振动响应特性,能够用于预测人体振动的研究中。
4结论
为了模拟人体对振动的响应特性,运用集中参数建模和多体动力学知识,考虑人体在振动干扰下的坐姿保持机制,建立了六自由度人体坐姿动力学模型,推导了人体振动响应特性表达式,以动态等效质量和座椅到头部传递函数为目标,采用Isight与Matlab联合计算求解多目标优化模型的方法识别了模型参数。结果显示,六自由度模型的振动响应特性曲线能与实验曲线保持一致。与ISO 5982(2001)推荐的模型及Tae-Hyeong Kim的模型相比,该模型能更好地拟合实验数据。说明所提出的建模方法合理,能准确地反映人体振动响应特性,对于更多人体部位之间传递函数的模拟也能达到效果,能够简化人体动力学建模,可用于人体振动响应的预测。
参 考 文 献
[ 1 ] Wei L, Griffin M J. Mathematical models for the apparent mass of the seated human body exposed to vertical vibration [J].Journal of Sound and Vibration,1998,212(5):855-874.
[ 2 ] Basri B, Griffin M J. Predicting discomfort from whole-body vertical vibration when sitting with an inclined backrest [J]. Applied Ergonomics,2013,44(3):423-434.
[ 3 ] Matsumoto Y, Griffin M J. Movement of the upper-body of seated subjects exposed to vertical whole-body vibration at the principal resonance frequency [J]. Journal of Sound and Vibration,1998,215(4):743-762.
[ 4 ] 韩愈,孟广伟,黄朝胜,等.越野车辆机动性研究[J].振动与冲击,2015,34(2):96-100.
HAN Yu,MENG Guang-wei,HUANG Chao-sheng, et al. Mobility of off-road vehicle[J].Journal of Vibration And Shock,2015,34(2):96-100.
[ 5 ] Marzbanrad J. Afkar A. A biomechanical model as a seated human body for calculation of vertical vibration transmissibility using a genetic algorithm[J]. Journal of Mechanics in Medicine and Biology,2013,13(4):1350053.
[ 6 ] Coermann R R. The mechanical impedance of the human body in sitting and standing position at low frequencies [J]. Human Factors,1962:227-253.
[ 7 ] International Standard 7962,1987. Mechanical vibration and shock—mechanical transmissibility of the human body in the z direction[S].
[ 8 ] International Standard 5982,2001, Mechanical vibration and shock—Range of idealized values to characterize seated body biodynamic response under vertical vibration[S].
[ 9 ] 张鄂,刘中华,邵晓春,等.九自由度乘坐动力学模型的人体振动特征仿真[J].交通运输工程学报,2010,10(4):58-64.
ZHANG E, LIU Zhong-hua,SHAO Xiao-chun, et al. Simulation of human vibration characteristics based on 9-DOF riding dynamics model[J]. Journal of Traffic and Transportation Engineering,2010,10(4): 58-64.
[10] Cho Y, Yoon Y S. Biomechanical model of human on seat with backrest for valuating ride quality [J]. International Journal of Industrial Ergonomics, 2001, 27: 331-345.
[11] Kim K S,Kim J, Kim K J,et al. Dynamic modeling of seated human body based on measurements of apparent inertia matrix for fore-and-aft/vertical/pitch motion[J]. Journal of Sound and Vibration,2001, 330(23): 5716-5735.
[12] Kim T H, Kim Y T, Yoon Y S,et al. Development of a biomechanical model of the human body in a sitting posture with vibration transmissibility in the vertical direction [J]. International Journal of Industrial Ergonomics, 2005,35(9): 817-829.
[13] 颜璘娟,杨智春,罗亨存.坐姿人体的冲击力学响应分析[J].振动与冲击,2010,29(9):151-154.
YAN Lin-juan, YANG Zhi-chun, LUO Heng-cun. Analysis on impact response of seated human body[J]. Journal of Vibration and Shock, 2010, 29(9):151-154.
[14] 李晓玲,张鄂,陆长德. 人体生物力学模型的驾驶舒适度仿真研究[J].西安交通大学学报, 2008, 42(5):556-560.
LI Xiao-ling,ZHANG E, LU Chang-de. Driving comfort simulation based on human biomechanics model under vibration [J].Journal of Xi’an Jiaotong University,2008,42(5):556-560.
[15] Wu M, Ji L, Jin D. Minimal step length necessary for recovery of forward balance loss with a single step [J]. Journal of Biomechanics,2007,40(9):1559-1566.
[16] 黄小兵,刘博.平衡三联及中枢整合在人体平衡中的作用[J].前庭医学,2009,17(6):534-536.
HUANG Xiao-bing,LIU Bo. Balance ability in patients with benign paroxysmal positional vertigo[J]. Journal of Audiology and Speech Pathology,2009,17(6):534-536.
[17] 程熙,潘志庚.虚拟人运动中受扰的平衡保持算法[J]. 计算机辅助设计与图形学学报,2009,21(3):325-330.
CHENG Xi,PAN Zhi-geng. A balance keeping algorithm for virtual characters in loco motion[J]. Journal of Computer-Aided Design & Computer Graphics,2009,21(3):325-330.
[18] 苏海龙,张大卫,李佳.步态自主平衡行为的下肢神经肌肉力学分析[J]. 天津大学学报,2013,46(8):743-748.
SU Hai-long,ZHANG Da-wei, LI Jia. Analysis of neuromuscular mechanics of lower extremities based on self-balance recovery during walking [J]. Journal of Tianjin University, 2013,46(8):743-748.
[19] 张鄂,许临安,刘中华,等. 多自由度坐姿人体上体系统动力学建模与振动特性研究[J].工程设计学报,2008,15(4):244-249.
ZHANG E,XU Lin-an, LU Zhong-hua,et al. Dynamic modeling and vibration characteristics of multi DOF upper part system of seated human body [J]. Journal of Engineering Design, 2008,15(4):244-249.
A dynamic model of a seated human body based on dynamic response
ZHANGZhi-fei1,2,HUZheng-quan2,XUZhong-ming1,2,HEYan-song2,HUANGShen-rong2
(1. State Key Lab of Mechanical Transmission, Chongqing University, Chongqing 400030, China;2. College of Automotive Engineering, Chongqing University, Chongqing 400030, China)
Abstract:To precisely simulate the dynamic response of a seated human body and simplify its mechanical model, a six-DOF dynamical model was developed by combining analytical mechanics and actual situations of each segment of a human body. Its equations of motion and formulas of dynamic response were presented and parameters of the model were derived with measured data of apparent masses, vertical and rotational vibration transfer functions from seat to human head using curve fitting. Results showed that the model can precisely fit the dynamic response of the seated human body. Comparing the proposed model with the classical lumped model(a model recommended by ISO 5982(2001))and a complex biodynamic model (Tae-Hyeong Kim’s model), it was shown that the proposed model can fit the dynamic response the seated human body more precisely with a simpler structure, and it can be used to simulate the dynamic response of the seated human body.
Key words:dynamic model; whole-body vibration; apparent mass; transfer function; parametric identification
中图分类号:TH113.1
文献标志码:A
DOI:10.13465/j.cnki.jvs.2016.04.017
收稿日期:2014-10-16修改稿收到日期:2015-03-11
基金项目:国家自然科学基金项目(51109390);中央高校基本科研业务费(CDJZR13110041)
第一作者 张志飞 男,博士,副教授,1983年7月生
