潜艇自航模水声定位系统的设计与实现*
2016-04-15尚留宾陈志诚
尚留宾 魏 军 陈志诚
(海军工程大学 武汉 430033)
潜艇自航模水声定位系统的设计与实现*
尚留宾魏军陈志诚
(海军工程大学武汉430033)
摘要为满足潜艇自航模试验中目标定位的需要,针对某型潜艇自航模型设计和实现了一套水声定位系统。系统结合水声接收、发射等相关特定硬件设备实现了对水中目标数据实时采集、处理、监测。系统还具有传感器延时标定、数据实时采集处理、轨迹显示、数据存储等功能,对多通道数据采集同步、野点修正等问题进行了处理。最后通过对比水声定位系统轨迹与GPS轨迹,结果表明,该水声定位系统能够实现对自航模型的精确二维定位。
关键词自航模; 水声定位; 数据采集; 数据同步; 二维定位
Design and Implementation of Underwater Acoustic Positioning System in Submarine Self-propelled Model
SHANG LiubinWEI JunCHEN Zhicheng
(Naval University of Engineering, Wuhan430033)
AbstractTo meet the demands of the submarine target positioning in self-propelled model experiment, a set of underwater acoustic positioning system is designed and implemented according to a certain type of submarine self-propelled model. Combined with certain acoustic receiving and launching hardware, the goal of real-time data acquisition, processing, testing of underwater target is achieved. The system also possesses the functions such as sensor delay calibration, track display, data storage, and can solve the problems such as multichannel data acquisition synchronization and abnormal points. Finally, the comparison between acoustic positioning and GPS trajectory shows that the underwater acoustic positioning system can realize the accurate two-dimensional positioning of self-propelled model.
Key Wordsunderwater acoustic positioning, self-propelled model, data acquisition, data synchronization, two-dimensional positioning
Class NumberTP399
1引言
水下自航模试验对于研究潜艇在复杂环境条件下的机动性、操纵性等具有独特的优势[1]。由于潜艇自航模型在水下运动,在空气中常用来传递信息的介质如光波和无线电波等在水中会产生较大的衰减,因此基于声波探测的水声技术是获取和传递水下信息最有效的手段之一[2]。目前水声定位广泛应用于水下机器人、大型船舶、水下无线网络传感器定位等[3~5]。对于潜艇自航模型的定位应用较少,而且大多集中在水听器的布阵形式、定位算法的研究上,缺乏对潜艇自航模水声定位系统整体的研究和工程实践[6~9]。本文首先针对潜艇自航模试验具体工程试验环境[10],结合系统硬件条件,从系统的角度出发利用LabVIEW设计和实现了潜艇自航模水声定位系统。其次采用水面船舶自航模型作为试验对象,以水面船舶的GPS定位作为参考,对设计的水声定位系统定位能力进行检验分析,并针对试验环境中出现的实际问题对定位系统进一步优化处理。通过对比水声定位和GPS定位两种实时定位轨迹,表明该水声定位系统具有较好稳定性和可靠性。最后对水声定位解算点进行了误差分析,平均误差小于0.3m,达到了试验误差要求。
2水声定位原理
在潜艇自航模试验中,为节省成本,降低布设传感器难度,同时考虑到潜艇自航模下潜深度较浅,在其运动维度上深度距离相对平面距离可忽略不计,因此试验要求平面二维定位即可。
目标点距已知点之间的距离主要依靠传播信号从目标点发射到接收点接收之间的时间差进行测定,通过测量目标点距三个或更多个已知点之间的距离解算出目标点位置。进行目标二维定位时仅需要三个已知节点即可,三个已知参考节点的坐标分别为(x1,y1)、(x2,y2)、(x3,y3)。理想状态下目标点(x0,y0)到三个已知节点的真实距离为(d1,d2,d3),三圆相交于一点,得到方程组:
(1)
化简可得:
(2)
求解方程组可得:
AX=B
(3)
X=A-1B
(4)


实际环境中由于受外界环境干扰等影响,目标点到三点之间的距离存在一定误差,因此通常情况下三圆相交往往存在多个交点,如图1所示。

图1 实际情况
式(3)修正为
AX+E=B
(5)
其中E为随机测距误差。
根据最小二乘估计原理:
(6)
求解上式可得:
(7)
3水声定位系统的设计
3.1系统硬件组成及工作原理
为了能够实时检验水声定位系统的定位精度和跟踪效果,选用同时装有GPS定位和水声发射换能器的水面船舶自航模型进行试验。系统硬件组成如图2所示。
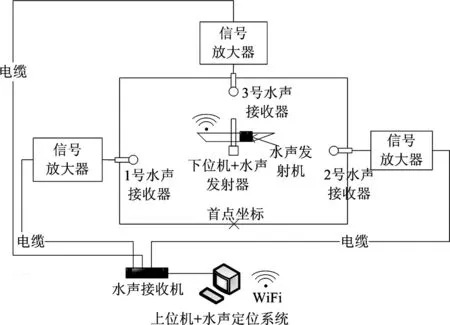
图2 系统硬件组成示意图
自航模距各水声接收器之间的距离测定建立在水声发射机与接收机之间启动信号同步的基础上的。以测量自航模距1号水声接收器为例,水声发射机的发射频率为1Hz,水声发射换能器在t0时刻发出声波脉冲,固定在岸边的1号水声接收器在t0+Δt时刻接收到声波脉冲后将声信号转换为电信号通过信号放大器发送至水声接收机。水声接收机将时间差Δt以数据帧格式发送至串口。
水声定位系统同时读取水声接收机多个串口数据以获得水声发射换能器距各个接收器之间的距离。将时间差与声速相乘即得到自航模距各水声接收器的距离。
试验开始前需要利用差分GPS测得水声接收器固定坐标,在解算自航模位置时将测得的GPS坐标转换为平面坐标。获得三边距离和三个已知节点位置根据式(7)计算得到自航模位置。
3.2系统软件组成
水声定位系统的软件部分是基于LabVIEW13版本进行开发设计的,主要完成系统标定、多通道数据采集、数据实时处理、数据存储和显示等功能。在试验开始前需要对水声接收器延时误差、实际水声声速等参数进行标定。程序设计流程框图如图3所示。
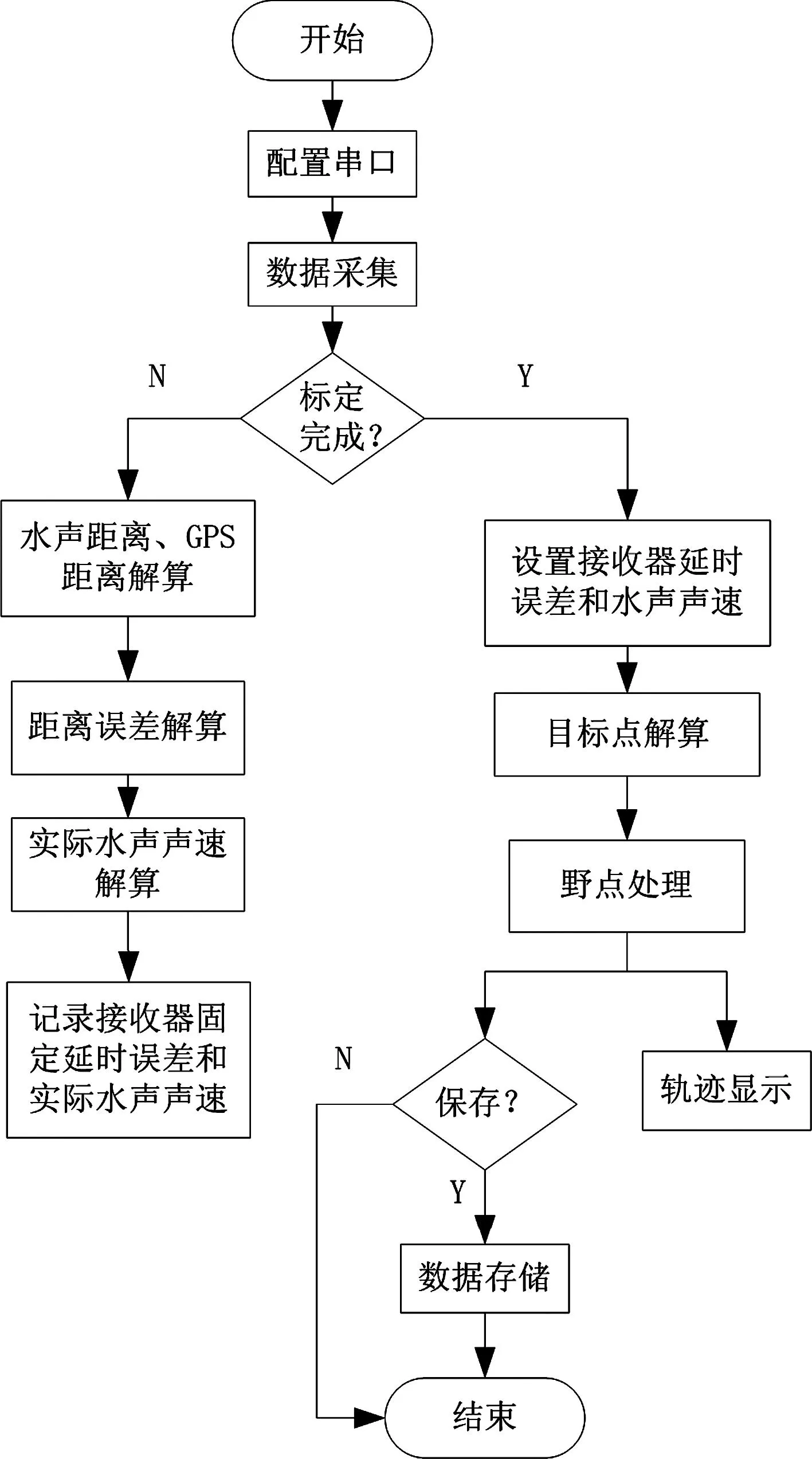
图3 程序流程图
在潜艇自航模下水前首先需要利用装有GPS和水声发射器的水面自航模对相关参数进行标定,标定原因详见4.3节。利用预设声速与数据采集到的时间差数据计算得到三边水声距离,然后计算同一周期内的GPS距离与水声距离之间的偏差,同时利用GPS距离与时间差数据计算实际声速值。分析距离误差和实际声速并记录固定距离误差和实际声速值。
标定完成后,按照标定值设置接收器延时误差和水声声速,解算出目标点后,对于满足野值判定条件的坐标进行处理,详细野值判定处理过程见4.2节。将处理后的目标点坐标以曲线形式显示在主界面上,如需保存,则存储三边水声距离、水声目标点等信息。
4水声定位系统实现及关键技术分析
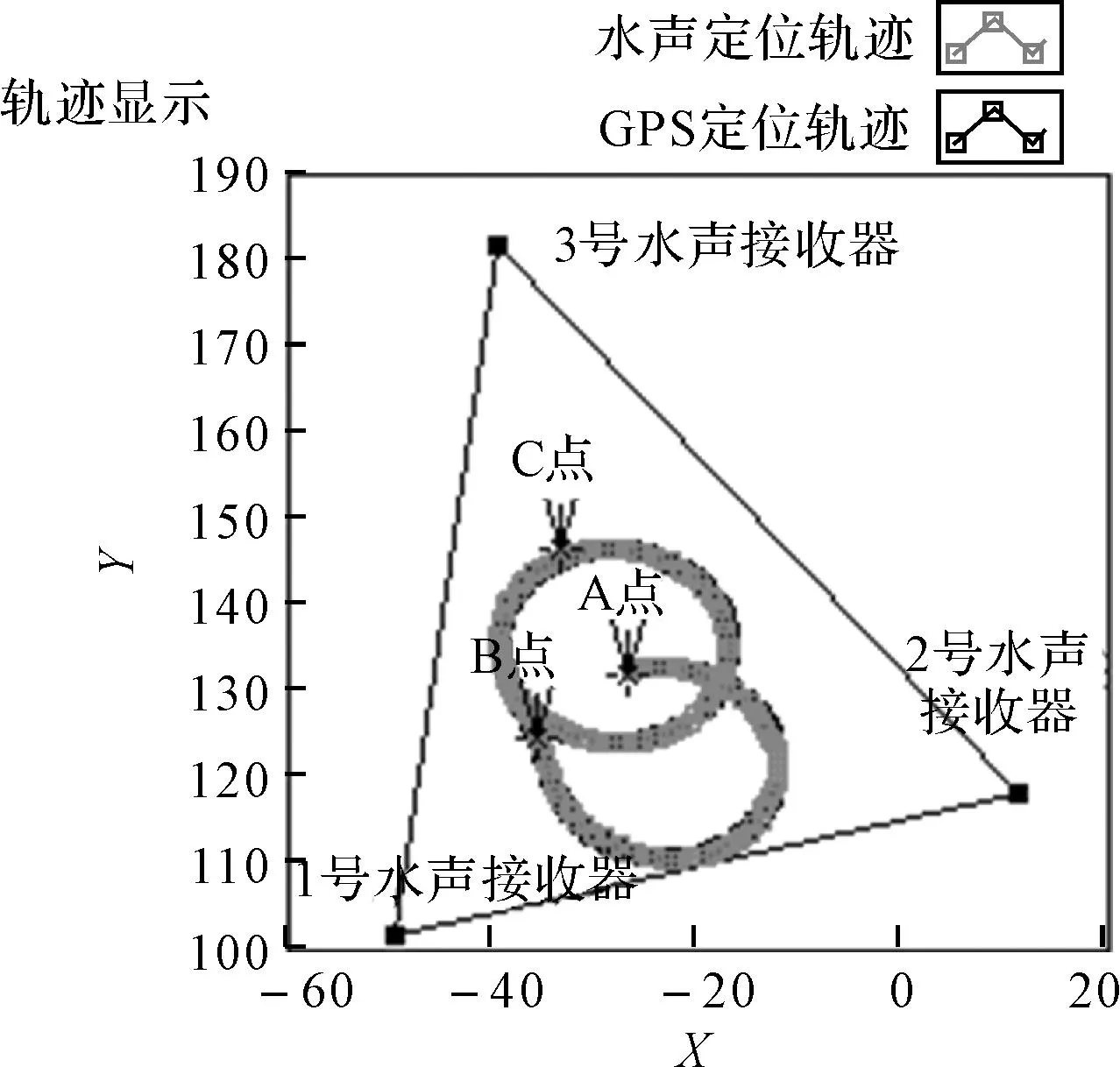
水声定位实验在长为120m,宽63.6m的水池中进行。三个水声接接收器平面坐标分别为(-50.04,101.56),(11.35,118.20),(-39.62,101.56)。根据实际情况声速选择为1450m/s。在常规情况下试验结果如图4所示。
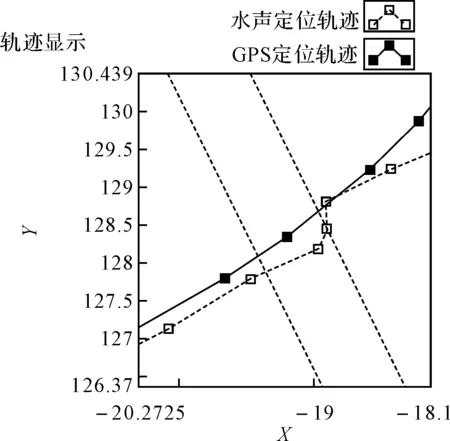
图4 试验航迹局部图
观察试验航迹图,水声定位系统轨迹主要存在以下问题:
1) 轨迹存在“锯齿”;
2) 存在明显偏离定位轨迹的水声定位点;
3) 水声定位轨迹与GPS定位轨迹之间存在固定偏差。
如何处理这些问题是提高水声定位精度的关键。
4.1多通道数据采集同步
“锯齿”现象产生的主要是多串口数据读取不同步造成的。常规情况下,若将程序循环等待时间设置为200ms,在1s周期内可多次读取串口数据,而三个串口数据在同一周期内并非同时发生改变,因此在1s内可能产生解算出多个不同的点。将程序等待时间设置为1s后,可以消除锯齿现象。但程序读取串口时间仍然不确定,同样存在数据不同步问题,如图5所示。
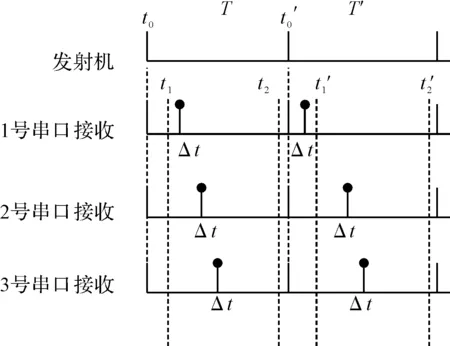
图5 多通道数据采集同步示意图
其中t0时刻为发射机和接收机启动的整秒信号,发送周期为1s;Δt为串口收到的时间差;t1、t2为当前周期程序读取串口时刻。

4.2“野点”处理
在实际工程环境中,由于外界环境干扰等问题可能产生较大测距误差,这部分误差不是解算方法造成的。如表1测量数据表所示,测量的2号距离和3号距离在第50s处出现较大偏差,导致解算点坐标与实际坐标偏差较大。这类异常点通常称作“野点”。综合试验情况来看,“野点”出现的概率不高,但非常影响对目标状态的实时观测。因此,在数据处理过程中需要对这些“野点”进行判断并予以剔除。

表1 测量数据表
如图6所示,其中A、B两点分别为t-2,t-1时刻测得的点,C点为t0时刻待测点。对于判断解算点坐标是否属于“野点”主要参考指标为解算点与上一次测量点之间的方向和距离偏差。

图6 “野点”判断示意图
方向判断:
(8)
(9)
|θBC-θAB| (10) 其中rθ表示方向容忍偏差,其值一般根据目标点运动角速度而定。 若式(10)满足,则表明方向合理。 距离判断: |dAB-dBC| (11) 其中rd表示距离容忍偏差,其值一般根据目标运动速度而定。 若式(11)满足,则表明距离合理。 若方向或距离任一偏差过大则认为该点为“野点”,删除“野点”并以上一时刻坐标点作为该时刻坐标点。 4.3传感器延时误差标定 出现此类偏差的原因在于水声接收器自身具有一定的延时误差。以分析3号距离误差数据为例,未对接收器进行延时误差标定前,距离误差如图7所示。 图7 距离误差趋势图 从趋势图中可以看出距离误差始终在1附近跳动,说明3号接收器有一定的延时误差。在试验开始前应根据距离误差实时数据对水声接收器延时标定。通过调节延时误差使距离误差在零值附近跳动。 4.4修正后结果 方向容忍偏差rθ=10°,距离容忍偏差rd=2m。1号接收器延时标定设置为-0.5;2号接收器延时标定设置为0;3号接收器延时标定设置为1。自航模试验航迹如图8所示。 图8 试验航迹图 图9 航迹局部图 目标船由A点出发经过B点后绕C点后做回转运动,总体运动轨迹为:A-B-C-B。对GPS点与水声定位点之间的距离差进行分析,误差曲线如图10所示,平均距离误差为0.2864m。 图10 误差分析 5结语 本文设计的水声定位系统采用的是LabVIEW图形化编程语言,操作简单方便,扩展性较好,缩短了系统开发时间。同时解决了实际工程环境中的数据同步、“野点”处理等问题。结果满足试验要求。在综合误差中还存在一些较大误差点,将在今后的研究中对这些误差进一步分析以提高定位精度。在实际应用过程中可根据实际情况增加水声接收节点,扩大试验范围。该水声定位系统已成功应用到实际项目试验过程中。 参 考 文 献 [1] 陈东宾,肖昌润,张文照.水声式自航模同步定位系统研究及应用[J].船海工程,2011,40(6):194-19. [2] 王波,毕毅,李和平.水声式自航模运动轨迹实时测量系统[J]. SHIP ENGINEERING,2003,25(2):53-55. [3] 周艳.基于RSSI测距的传感器网络定位算法研究[J].计算机科学,2009,36(4):119-121. [4] 王怡,付丽琴.基于多传感器的水声定位精度研究[J].计算机测量与控制,2009,17(2):363-367. [5] Yuh J. Design and control of autonomus underwater robots: a survey[J]. Autonomus Robots,2000(8):7-24. [6] 钱洪宝,孙大军.水声定位系统现状[J].声学技术,2011,30(3):389-391. [7] 董真杰,郑琛瑶,张国龙.多传感器数据融合提高水声定位精度[J].现代电子技术,2014,37(18):127-129. [8] 李飞,李斌.水声定位系统数据采集单元设计[J].声学技术,2009,28(5):664-668. [9] 焦小涛,李建昌,门丽娟.两种TDOA定位算法在水声被动定位下的精度分析[J].电声技术,2013,37(1):73-75. [10] 魏军,陈志诚,曾斌.潜艇自航模控制系统设计[J].火力与指挥控制,2014,39(11):171-174. 中图分类号TP399 DOI:10.3969/j.issn.1672-9730.2016.03.036 作者简介:尚留宾,男,硕士研究生,研究方向:信息管理。魏军,男,博士,副教授,研究方向:系统开发与系统集成。陈志诚,男,博士,讲师,研究方向:信息管理。 收稿日期:2015年9月9日,修回日期:2015年10月22日