主动前轮转向系统与防抱死制动系统协调控制
2016-04-11李强李晗付景顺
李强,李晗,付景顺
(沈阳工业大学,辽宁 沈阳 110870)
主动前轮转向系统与防抱死制动系统协调控制
李强,李晗,付景顺
(沈阳工业大学,辽宁 沈阳 110870)
摘 要:针对汽车转向制动工况,研究汽车主动前轮转向系统(AFS)和防抱死制动系统(ABS)的协调控制;建立七自由度整车模型、前轮主动转向系统模型、防抱死制动系统模型以及轮胎模型,设计了转向系统控制器和制动系统控制器,以及两子系统的协调控制器,并对提出的控制策略进行了仿真分析和对比验证。仿真结果表明:在转向制动工况下,与独立控制系统相比较,协调控制系统能够在保持车辆制动稳定性的同时缩短制动距离,充分发挥两子系统的优势,进一步了提高汽车的操纵性和安全性。
关键词:主动前轮转向系统;防抱死制动系统;协调控制
10.16638/j.cnki.1671-7988.2016.02.039
CLC NO.: U463.4 Document Code: A Article ID: 1671-7988(2016)02-106-03
引言
自汽车问世以来,汽车逐渐成为了重要的交通工具,极大的提高了人们的生活质量,然而汽车保有量的增加也伴随着交通事故的频频发生,据相关调查显示,三分之一以上的交通事故是由于转向制动不良造成[1]。人们越来越重视汽车的安全性和稳定性,提高制动安全性和转向稳定性已成为当今汽车技术研究的重要议题。防抱死制动系统的应用有效地改善了车轮抱死引起的不安全隐患,目前广泛应用的是逻辑门限值控制方法。与此同时,主动前轮转向系统能够通过主动调节前轮转角和转向力矩,实现低速状态下转向灵活轻便,高速状态下转向稳定安全[2]。
在转向制动工况下,方向稳定性和制动性能是评价汽车控制性能的两个重要指标。但是两者是相互制约、相互影响的,短的制动距离和方向稳定性之间存在着一定的矛盾。因此本文针对转向制动工况,研究AFS和 ABS的协调控制,在方向稳定性和制动性能之间权衡找到平衡点,实现在保证方向稳定性的同时提高制动效能。
1、汽车仿真模型
1.1 车辆动力学模型
为了对车辆制动和转向性能进行研究,建立多自由度车辆模型,考虑到减小求解时间和降低仿真模型的复杂程度,因此忽略垂向运动和转向系的间隙,建立7自由度整车模型[3]。如图1所示,七个自由度分别为:纵向位移、侧向位移、横摆角位移和四个车轮的旋转自由度。

图1 七自由度整车模型
动力学方程如下:
纵向运动:

横向运动:

横摆运动:

式中:
M:车辆总质量;
μ、ν、γ:车辆坐标系下的纵向、侧向、横摆角速度;
a、b:前后轴到质心的距离;d:轮距;
i:四个车轮,i=1~4;
Fxi、Fyi :四个轮胎分别输出的纵向力和侧向力;
δ(i):各个车轮的侧偏角,即车轮与车辆坐标系X轴的夹角。
1.2 轮胎模型
轮胎模型多种多样,其中GIM模型计算速度快、不需要试验数据拟合、工况适应性强,故本文选用GIM模型[4]。
轮胎侧偏角计算公式:

轮胎与地面之间的纵向力FX:

轮胎与地面之间的横向力Fy:

式中:
纵向滑移率:Ss=(vx-vc)vx
横向滑移率:Sα=|tanα|
综合滑移率:ssα=Ss2+Sα2
VX、VC:车轮的圆周速度、纵向速度;
:地面附着系数;:车轮垂向载荷;
:轮胎纵向刚度、侧向刚度。
1.3 主动前轮转向器模型
以机械式叠加主动转向系统作为研究对象,如图2所示,前轮转角有两部分组成,一部分是驾驶员给定的转向角,另一部分是主动转向系统附加的转向角。传感器将检测测出的行驶工况信号包括车速、横摆角速度和方向盘转角,传递给控制器,控制器根据行驶工况按照预先设定好的控制方法输出附加转角的控制量,再由执行器将附加转角叠加到前轮转角上[5]。
叠加后的前轮转角:

图2 机械式叠加主动转向系统原理图
1.4 防抱死制动器模型
ABS的工作原理是,通过调节制动力矩使得滑移率在理想滑移率附件变化,因为轮胎处于理想滑移率时能最大限度的利用地面附着系数,获得较大的制动力和侧向力,从而缩短制动距离,防止车辆侧滑。其中通过液压传动单元调节轮缸液压来控制制动力矩,本文将液压单元简化为一个电磁阀单元和一个积分单元。电磁阀单元的传递函数:
G(s)=KT∙s+1∙1s=100s(0.01s+1) (7)
2、控制器设计
2.1 主动前轮转向控制器设计
本文采用横摆角速度反馈控制,即利用实际横摆角度和理想横摆角速度之差进行反馈控制。选择PID控制作为控制方法[6],以理想横摆角速度与实际角速度之间的偏差e和偏差的变化率ec作为PID控制器的输入。经PID控制器计算后,输出附加前轮转角。
PID控制规律为:

其中理想横摆角速度由二自由度线性车辆模型得出:

式中:
Cf、Cr:为前后轮侧偏刚度
l=a+b:为轴距
如图3所示,基于Matlab/Simulink建立AFS系统模型。
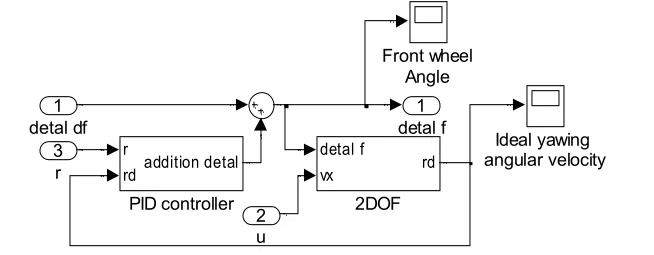
图3 AFS PID控制仿真模型图
2.2 防抱死制动系统控制器设计
对于ABS控制系统,本文采用鲁棒性好、控制规律灵活的自适应模糊控制方法。控制器的输入量e为最佳滑移率与实际滑移率之间的差值,输入量ec为该差值的变化率,输出量u为制动压力的控制量。将滑移率误差E 在论域[-0.2,0.8]上划分为6档:NB,NM,ZE,PS,PM,PB;滑移率误差变化率E C和制动压控制量U在论域均为 [-6, 6] ,且都划分为7档:NB,NM,NS ,ZE,PS,PM,PB。相应的比例因数分别为Ke=Kec=1、Ku=1/6 ,具体控制规则如表1所示。

表1 模糊控制规则表
结合前文提到的ABS控制器模型和ABS模糊自适应控制理论,基于Matlab/Simulink建立ABS系统仿真模型,如图4所示。
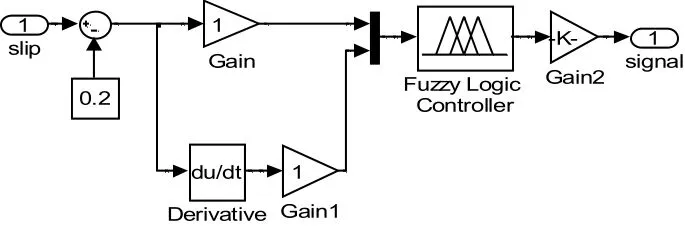
图4 ABS 模糊控制仿真模型图
2.3 协同控制器设计
综合考虑主动前轮转向系统与防抱死制动系统之间的干涉和耦合[7]。制定了如下协同控制规则:当横摆角速度超过横摆角速度门限时,AFS主要控制目标是横摆角速度,ABS前轮单独控制后轮低选,来保证横向稳定性;当横摆角速度小于等于横摆角速度门限时,AFS正常控制,ABS四轮独立控制,充分利用地面附着系数。
3、仿真结果
基于Matlab/Simulink 建立仿真模型,仿真车辆的基本参数如表2所示。将车辆的初始速度设为100km/h,为模拟转向制动工况,给方向盘输入一个阶跃信号。

表2 车辆基本参数表
由图5可知,相对于单独控制,协调控制作用下的汽车制动距离减少了4.85m,制动时间也明显缩短了,具有良好的制动效能。

图5 制动距离
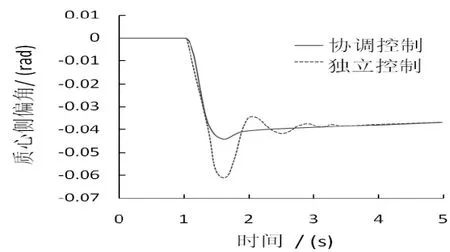
图6 质心侧偏角
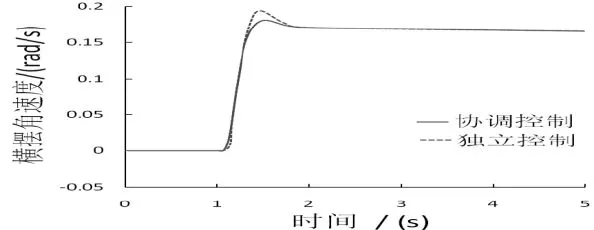
图7 横摆角速度
从图6-7中可以看出,协调控制下的汽车质心侧偏角超调量明显降低,降低了0.017rad,并且很快趋于稳定,相较于独立控制达到稳定状态所用的时间缩短了1.32s;横摆角速度超调量也降低了0.016rad/s,更快的趋于稳定,提高了汽车的方向稳定性。
4、结论
本文基于Matlab/Simulink建立了前轮主动转向系统和防抱死制动系统的数学模型,采用对比分析比较法,验证了在转向制动工况下,与AFS和ABS独立控制系统相比较,协调控制系统能够在保持车辆制动稳定性的同时缩短制动距离,充分发挥两子系统的优势,进一步了提高车辆的操纵性和安全性。
参考文献
[1] 李果,郭亭亭,刘亚赟.汽车底盘系统协同控制[J].北京信息科技大学学报, 2015, 30(2):1-8
[2] Willy K, Gerd R, Wolfgang R.Concept and Functionality of the Active Front Steering System[C].SAE 2004-21-0073.
[3] 喻凡,林逸. 汽车系统动力学[M].北京:机械工业出版社, 2005.171-174.
[4] 魏朗 .用于碰撞事故中车辆动力学模拟的轮胎模型分析 [J].西安公路交通大学学报, 1999, 19(2):73-76.
[5] 周兵,徐蒙,范璐.基于EKF轮胎侧向力估计的AFS和EPS集成控制[J].振动与冲击,2015,32(11):93-98
[6] 吕绪宁.汽车主动横向稳定性杆与主动前轮转向协调控制[D].湖南:湖南大学, 2014.
[7] 姜炜,余卓平,张立军.汽车底盘集成控制综述[J].汽车工程,2007, 29(5):420-425.
Coordination Control of Active Front Steering and ABS
Li Qiang, Li Han, Fu Jingshun
(Shenyang University of Technology, Liaoning Shenyang 110870)
Abstract:A coordination control method is designed for vehicle Active Front Steering (AFS) and Anti-lock Braking System (ABS) on steering braking condition.7-DOF vehicle model, steering system model, braking system model and the tire model are established, andthe AFS controller, ABS controller, coordinated controller of two subsystems are also designed. Simulation analysis and comparison of the proposed control strategy are carried out. The simulation results showed: on the steering braking condition, compared with AFS and ABS independent control, the coordination controlobtain the better vehicle stability and gain the greater braking efficiency; the advantage of two subsystem are fully used, finally enhance the vehicle’s braking performance and directional stability.
Keywords:AFS; ABS; Coordination Control
作者简介:李晗,就职于沈阳工业大学。
中图分类号:U463.4
文献标识码:A
文章编号:1671-7988(2016)02-106-03
