带有不确定参数的挠性航天器机动控制*
2016-04-08孙灿杭贾英宏徐世杰
孙灿杭,贾英宏,徐世杰
(北京航空航天大学宇航学院,北京100191)
带有不确定参数的挠性航天器机动控制*
孙灿杭,贾英宏,徐世杰
(北京航空航天大学宇航学院,北京100191)
将输入成型技术与闭环反馈控制结合设计,实现航天器机动控制中挠性附件的振动抑制.针对挠性航天器姿态机动过程中,系统惯量、模态矩阵等参数的不确定性对输入成型器抑制挠性附件振动的影响,提出基于最大允许残余振动的输入成型器建模参数的计算方法,并量化分析不确定参数对挠性附件振动的影响,为选择合适的成型器提供定量的理论依据.该方法可降低传统输入成型器设计的保守性,有利于提高控制性能.仿真结果表明,将系统存在的不确定参量考虑在内,系统振动抑制效果要优于不考虑的情况.
输入成型技术;姿态机动;振动抑制;不确定性
0 引言
航天器在执行空间任务时往往需要进行姿态机动,而机动过程中会激励卫星上挠性部件的振动,进而影响航天器本体的姿态控制精度.为解决这一问题,很多学者针对空间挠性部件的主动振动抑制问题展开了研究.主动振动抑制技术可分为两大类:分布式振动抑制[1-3]和集中式振动抑制[4-5].分布式控制可有负速度反馈[1]、正位置反馈[2-3]等多种设计方法,分布式控制由于将执行机构直接布置于挠性部件上,因而对挠性部件的振动抑制效果较好;但在航天工程应用中,受制于结构以及电路设计等多方面因素,往往不具有分布式控制的条件.
集中式振动控制是航天工程中应用较为广泛的方案,其中输入成型技术[4-5]是较具代表性的一种控制方法,通过施加一系列的脉冲,使得系统在最后一次脉冲响应后,达到零振动状态.其内在鲁棒性使得系统在存在建模误差的情况下,挠性结构振动也能得到有效抑制.超不敏感型(EI)输入成型器[6]相对标准的输入成型器,更能适应较大范围的建模误差.文献[7]提出指定不敏感度(SI)输入成型器,有效地抑制多频段振动,但SI是基于优化算法设计的,增加了问题的复杂度,导致实际应用受到限制.文献[8-9]利用卷积形式实现了输入成型技术的多模态振动抑制,其形式简单有效,但同时也增加了系统的响应时间.由于输入成型技术形式简单,又能有效的抑制挠性结构的振动,在机器人[10]、航天器[11-12]等领域有很大的应用价值.文献[10]将输入成型技术应用到空间机械臂的控制与振动抑制中,并提出了改进型负输入成型技术,缩短了系统响应时间.文献[11]将反馈环节与输入成形器结合起来,实现了航天器姿态机动中挠性附件的振动抑制.文献[12]分别分析了轨迹规划和输入成型技术在航天器快速机动中的优缺点,并将二者结合起来使用.
然而,以往的输入成型控制器设计是以系统固有频率为依据的,设计过程中采取哪种输入成型器往往取决于系统固有频率的误差范围.由于系统固有频率与多种因素有关,往往难以精确获得,其误差范围的估计相对保守,因此输入成型器的选择和参数设计也通常较为保守.这样虽然可以获得满足要求的残余振动,但往往会降低系统的响应速度.本文重点考虑航天器惯量和刚柔耦合系数的不确定性对系统频率和阻尼的影响.依据不确定性的不同数学描述对其量化,分析不确定性对系统频率和阻尼的影响,以及系统频率和阻尼变化区域对残余振动的影响.在此基础上,提出了一种新的设计方法来计算建模频率[5]与阻尼,保证系统在最大和最小频率处,系统有相同或相近的残余振动,这在一定程度上增加了系统的鲁棒性.分析实际系统的参数(频率和阻尼)分布区域在指定残余振动对应的理论参数分布区域包含关系,为选择输入成型器提供一种定量依据,从而在保证振动抑制效果的前提下降低了输入成型器设计的保守性.
1 挠性航天器动力学模型
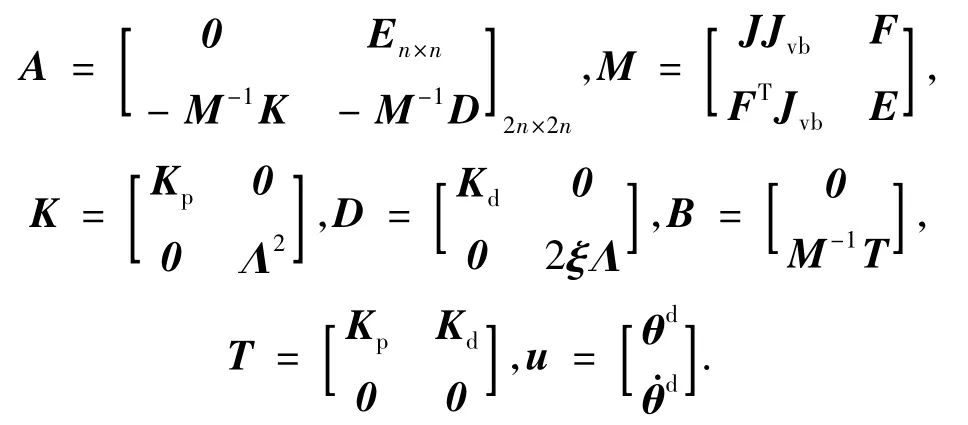
挠性航天器动力学模型,一般具有高耦合、无穷维特性.利用Lagrange方法对带有挠性部件的航天器进行姿态动力学建模,可得姿态动力学方程如下[12]:

其中,q=[θTτT]T,θ,τ分别为姿态角向量和模态坐标向量,J为航天器的总惯量阵,F为刚柔耦合系数矩阵,Λ,ξ分别为附件的振动频率矩阵与阻尼比矩阵,Tc为作用于航天器本体的控制力矩,Jvb=,θ为姿态角.
首先考虑采用如下PD控制器实现航天器姿态控制

其中:θd,θd分别为期望姿态角和姿态角速度,Kp,Kd为控制器对应的参数.
将式(2)代入式(1),并记x=[qTqT]T,加入PD控制后的闭环系统方程为

其中:
系统的模态参数(频率与阻尼)与矩阵A的特征值的关系为[13]

其中,λs为矩阵A的特征值,ωs、ξs分别为系统频率与阻尼.
2 不确定参数分析
实际应用中,航天器的转动惯量、刚柔耦合系数都不能精确获得,其具有不确定性,则M阵可写为如下形式:

其中,M0为标称值,ΔM为不确定项.
为了方便处理,将不确定矩阵ΔM分为如下二种情况.
情况1.ΔM的元素有界

其中,ΔM中元素的精确值未知,但元素是有界的.即,当H={hij},ΔM={Δmij}有|Δmij|≤hij,hij≥0.
针对具有该类型的不确定矩阵,引进随机变量t,作如下处理:
Ht={tijhij},t=[t1… tm]T∈Rm([-1,1])情况2.ΔM具有拓扑结构不确定性

其中,ti为未知参数,timin≤ti≤timax,Mi为已知矩阵.
考虑到M中有相同的元素,简化处理将其相同元素的不确定量用相同的不确定参数处理,比如惯量矩阵的对称性,矩阵M中刚柔耦合矩阵组成的部分.
那么,令Ht=tiMi,t∈Ω
考虑不确定问题后,重写方程(3),可得

其中,M=M0+Ht.
A的特征值、系统的频率与阻尼为

考虑到系统频率与阻尼的变化,为了增加系统的鲁棒性,必须选定一个适当的建模频率与阻尼设计输入成型器,使得系统在最坏情况下,对挠性附件有较好的振动抑制效果.
图1给出了三种类型输入成型器的残余振动与建模误差的理论关系示意图[5].可以看出,残余振动随着建模误差的增大逐渐增加,选定5%残余振动为设计误差范围,对应区间Ierr=[珚ωl珚ωr].
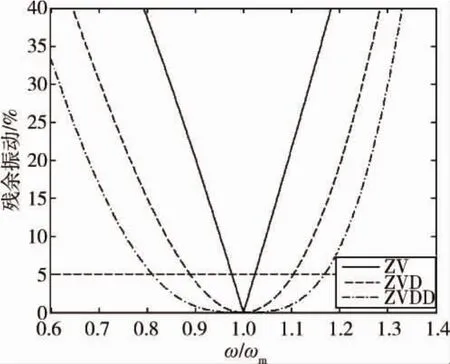
图1 二脉冲、三脉冲、四脉冲输入成型器误差敏感曲线Fig.1 Vibration error versus system natural for ZV,ZVD,ZVDD
单位化系统频率得到

其中:ωm∈[ωminωmax];ωmin、ωmax分别为系统的最小和最大频率.
由于系统频率所处范围是一定的,只有选择的建模频率使得系统在最小与最大频率处,残余振动有相等或者近似相等的值.实际系统频率区间到1的距离与理论残余振动为5%的频率区间到1的距离对应成比例

求得

同理,可以求出系统阻尼的建模值

3 输入成型器设计
在设计输入成型器时,必须考虑建模阻尼误差带来的影响.残余振动可表示为频率误差(真实频率/建模频率)与阻尼误差(真实阻尼/建模阻尼)的函数.残余振动为引入输入成型器与未加输入成型器时系统振动幅值的百分比.
图2为ZVD成型器残余振动与误差频率和误差阻尼之间的关系.每给定一个系统阻尼值时,残余振动和误差频率间的关系与只有误差频率时的大致走势类似,只是当建模频率为精确值时,系统的残余振动不一定为零.图3给出了ZVD成型器残余振动5%以内时,不同残余振动的分布区域示意图.由内至外,闭合区域依次为残余振动1%,2%,3%,4%,5%以内的频率与阻尼分布,记为S1,S2,S3,S3,S4,S5.可以得出相应关系为 S1S2S3S4S5.考虑最大可接受残余振动为5%,在实际应用中,处理不确定问题时,所求系统可能的频率与阻尼对(ω,ξ)组成的区域Sv.如果SvSi(Si为集合{S1,S2,S3,S4,S5}的某个元素),则ZVD输入成型器可以接受,否者,放宽残余振动要求标准,或采用鲁棒性更强的 ZVDD输入成型器.

图2 ZVD成型器误差敏感曲面Fig.2 Vibration error versus system natural frequency and damping

图3 5%以内ZVD成型器误差敏感区域分布Fig.3 Domain of 5%vibration error versus system natural frequency and damping for ZVD
4 仿真分析
仿真中选取具有一对对称太阳帆板的卫星模型.设置三轴期望角度X=[20°15° 0°],卫星本体质量 mb=1 062.8 kg,单个帆板的质量 ma= 40.25 kg,太阳帆板的阻尼比ξ=0.5%,前三阶模态频率分别为3.19 Hz、15.16 Hz、19.80 Hz,本体惯量Ib及单个帆板惯量Ia分别为:
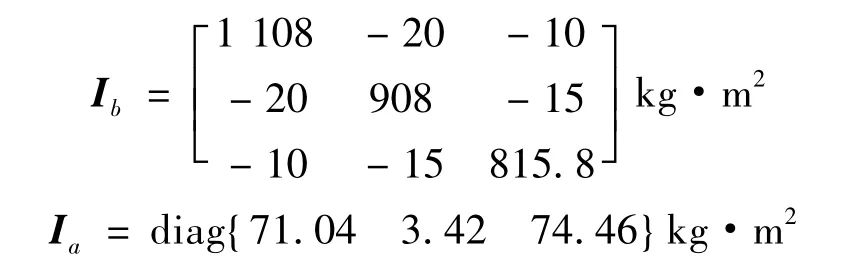
太阳帆板相对星本体坐标的安装位置(m):
ra1b=[0 0.8 0],ra2b=[0-0.8 0]刚柔耦合系数为

PD控制器参数:

算例1.整星有相对其转动惯量距5%的最大不确定量,单个帆板刚柔耦合系数矩阵具有30%的不确定量.
图4给出了只采用标称值设计输入成型器(实线,下同)与将惯量不确定项和刚柔耦合系数不确定项虑在内设计输入成型器(虚线,下同)的Euler姿态角响应曲线,表明后者的振动抑制效果要优于前者.图5显示两种情况下,一阶模态坐标与二阶模态坐标的响应曲线,后者的振动抑制效果优于前者.

图4 航天器Euler角Fig.4 Euler angle of spacecraft
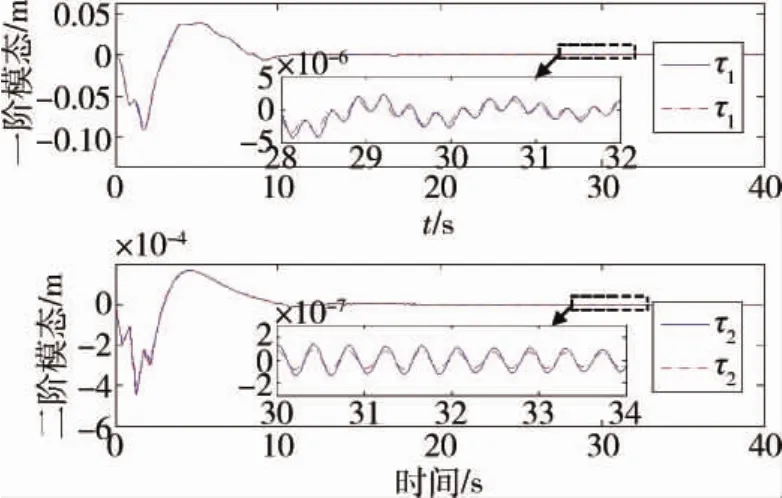
图5 一阶模态与二阶模态坐标Fig.5 first-order and second-order modal coordinates
图6为航天器的控制力矩.图7、8给出了ZVD成型器在5%残余振动下,系统姿控模态和一阶模态的频率与阻尼的分布区域(Sv).在ZVD成型器下系统可能的参数(频率与阻尼)范围在理论5%的残余振动区域内,可以确定采用ZVD成型器能满足精度需求.算例2.假设系统具有较大的不确定性,整星有相对其转动惯量距10%的最大不确定量,单个帆板耦合系数具有50%的不确定量.

图6 航天器控制力矩Fig.6 Control torque of spacecraft

图7 整星姿控模态频率与阻尼分布Fig.7 Domain of rigid modal frequency and damping for spacecraft

图8 系统一阶模态频率与阻尼分布Fig.8 Domain of first modal frequency and damping
图9、10分别给出了ZVD成型器、ZVDD成型器在5%残余振动下,系统姿控模态频率与阻尼的分布区域(Sv).在ZVD成型器下系统可能的参数范围超出了理论5%的残余振动区域,而ZVDD成型器下系统参数范围在理论5%残余振动以内.如果对姿态角精度要求不高,可以放宽残余振动的限制,采用ZVD成型器.如果对姿态角精度要求高,增强残余振动限制,采用ZVDD成型器,但系统响应时间会有所增加.由于考虑了不确定项后,ZVD不能满足精度要求,而ZVDD满足精度需求,因此,航天器姿控模态采用ZVDD成型器抑制振动.

图9 整星姿控模态频率与阻尼分布Fig.9 Domain of rigid modal frequency and damping for spacecraft

图10 整星姿控模态频率与阻尼分布Fig.10 Domain of rigid modal frequency and damping for spacecraft

图11 航天器Euler角Fig.11 Euler angle of spacecraft
图11给出了ZVD(实线)、ZVDD(虚线)下航天器姿态角响应曲线.姿态角响应曲线的走势表明了ZVDD的振动抑制效果要好于ZVD,验证了残余振动的频率阻尼分布域分析方法的有效性.图12给出了采用本文提出的方法与传统方法设计输入成型器的一阶模态与二阶模态坐标幅值曲线,考虑不确定性后,前者对振动抑制效果优于后者.

图12 一阶模态与二阶模态坐标Fig.12 First-order and second-order modal coordinates
5 结论
本文将系统惯量与刚柔耦合系数不确定性考虑在内,并定量分析了不确定参数对设计输入成型器的影响.针对系统可能的频率与阻尼的变化范围,提出了一种新的计算方法来设计输入成型器.保证在实际应用中最坏情况下,输入成型器对振动的抑制效果比不考虑不确定项的好.仿真结果显示,当不确定量较小时,在给定的精度下,采用ZVD即可满足系统要求,而当不确定量较大时,经计算、仿真ZVD不能满足精度要求,而ZVDD满足精度要求.另外,经计算分析得卫星的姿控模态频率主要受惯量矩阵的影响,而挠性附件的闭环模态频率主要受刚柔耦合矩阵的影响.该分析方法为选择合适的输入成型器提供了一种定量理论依据,避免了选择输入成型器的盲目性.
[1] SUN D,MILLS J K,SHAN J,et al.A PZT actuator control of a single-link flexible manipulator based on linear velocity feedback and actuator placement[J].Mechatronics,2004,14(4):381-401.
[2] BAZ A,POH S,FEDOR J.Independent modal space control with positive position feedback[J].Journal of Dynamic Systems,Measurement,and Control,1992,114(1):96-103.
[3] SHAN J,LIU H T,SUN D.Slewing and vibration control of a single-link flexible manipulator by positive position feedback(PPF)[J].Mechatronics,2005,15 (4):487-503.
[4] SINGER N C.Residual Vibration Reduction in Computer Controlled Machines[R].Massachusetts Inst of Tech cambridge Artificial Intelligence Lab,1989.
[5] SINGER N C,SEERING W P.Preshaping command inputs to reduce system vibration[J].Journal of Dynamic Systems,Measurement,and Control,1990,112(1):76-82.
[6] SINGHOSE W,DEREZINSKI S,SINGER N.Extra-insensitive input shapers for controlling flexible spacecraft [J].Journal of Guidance,Control,and Dynamics,1996,19(2):385-391.
[7] SINGHOSE W E,SEERING W P,SINGER N C.Input shaping for vibration reduction with specified insensitivity to modeling errors[J].Japan-USA Sym.on Flexible Automation,1996,1:307-13.
[8] HYDE J M,SEERING W P.Using input command preshaping to suppress multiple mode vibration[C]//Robotics and Automation,1991.Proceedings.IEEE,New York,1991:2604-2609.
[9] SINGHOSE W,CRAIN E,SEERING W.Convolved and simultaneous two-mode input shapers[C]//Control Theory and Applications,IEE Proceedings.IET,1997,144(6):515-520.
[10] 赵志刚.空间站机械臂转位控制与振动抑制研究[D].哈尔滨:哈尔滨工业大学,2013.ZHAO Z G.Transformation control and vibration suppression of manipulation of the space station[D].Harbin:Harbin Institute of Technology,2013.
[11] KONG X R,YANG Z X.Combined feedback control and input shaping for vibration suppression of flexible spacecraft[C]//International Conference on Mechatronics and Automation,Changchun,2009:3257-3262.
[12] ZHANG Y,ZHANG J R.Combined control of fast attitude maneuver and stabilization for large complex spacecraft [J].Acta Mechanica Sinica,2013,29(6):875-882.
[13] GAWRONSKI W.Advanced structural dynamics and active control of structures[M].Springer Science&Business Media,2004.
Control of Flexible Spacecraft Attitude Maneuver with Uncertain Parameters
SUN Canhang,JIA Yinghong,XU Shijie
(School of Astronautics,Beijing University of Aeronautics and Astronautics,Beijing 100191,China)
Input shaping and closed-loop feedback control are combined to realize the vibration reduction of spacecraft with flexible appendages during the attitude maneuver control.To ensure the validity of input shaping for suppressing the vibration of flexible appendages,the effect of uncertain parameters,such as system inertia and modal matrix,are considered during the attitude maneuver.A method to calculate the model parameters of input shaper,which is based on maximum residual vibration,is proposed.And the impact of uncertain parameters to vibration reduction of flexible appendages is quantitatively analyzed,which can be as a theoretical basis for selecting proper input shaper.It reduces the conservation of traditional input shaper and contributes to enhance the control performance.Simulation analysis indicates that the vibration suppression with considering system uncertain parameters is better than without them.
input shaper;attitude maneuver;vibration reduction;uncertain parameters
V448.2
A 文章编号:1674-1579(2016)05-0008-06
10.3969/j.issn.1674-1579.2016.05.002
孙灿杭(1991—),男,硕士研究生,研究方向为挠性航天器姿态机动控制;贾英宏(1976—),男,副教授,研究方向为航天器姿态动力学与控制,空间机器人/空间多体系统动力学与控制等;徐世杰(1951—),男,教授,研究方向为飞行器制导、导航与控制,鲁棒控制理论与应用,深空探测和月球探测技术等.
*国家自然科学基金资助项目(11272027).
2016-07-08
