磁悬浮惯性稳定平台硬件设计与实现
2016-04-01叶涛于啸男
叶涛++于啸男
【摘 要】本文介绍磁悬浮惯性稳定平台的工作原理。提出了惯性稳定平台的硬件电路总体设计方案,设计了以FPGA+DSP为核心的硬件控制系统。描述了硬件系统的组成,数字电路系统和模拟电路系统,并分别介绍各个电路系统的组成部分以及功能。详细描述了旋转变压器的设计、控制系统设计和电机驱动设计过程。
【关键词】惯性稳定平台;硬件电路;FPGA+DSP;控制系统;电机驱动
Designed And Implementation of hardware circuit for magnetic levitation inertial stabilization platform
YE Tao1,2 YU Xiao-nan2
(1.School of Information and Communication Engineering, North University of China, Taiyuan Shanxi 030051, China;
2.Beijing Aerospace Control Institute, Beijing 100039, China)
【Abstract】In this paper, the working principle of magnetic levitation inertial stabilization platform is introduced. The hardware circuit design scheme of inertial stabilization platform is given, and the hardware control system based on FPGA+DSP is designed. The composition of the hardware circuit, the digital circuit system, and the components and functions of each circuit are described. The process of the rotary transformer、the control system and the motor driver design are described in detail.
【Key words】Inertial platform; Hardware circuit; FPGA+DSP; Control system; Motor driver
0 引言
惯性稳定平台是实现高分辨率航空对地观测的关键设备,使用惯性稳定平台能够有效的隔离载体运动对遥感载荷产生的干扰[1]。惯性稳定平台可以承载较重的的有效载荷,通过固连于台体的陀螺敏感由机载机身角运动,线振动或者其他因素引起的台体干扰角运动,通过反馈控制计算机和电机的作用,驱动台体进行反向补偿运动,从而是有效载荷的视轴稳定在惯性空间里。在此基础上,利用高精度定位定向系统(POS)测量水平姿态基准,与陀螺稳定回路进行复合控制,使有效载荷视轴准确跟踪当地垂线,保证高分辨率对地观测。介绍以FPGA+DSP结构为核心的稳定平台硬件系统设计。利用FPGA逻辑控制能力和并行处理机制实时的采集POS、陀螺、角度传感器的数据,并通过DSP完成控制回路计算。
1 惯性稳定平台硬件系统总体设计
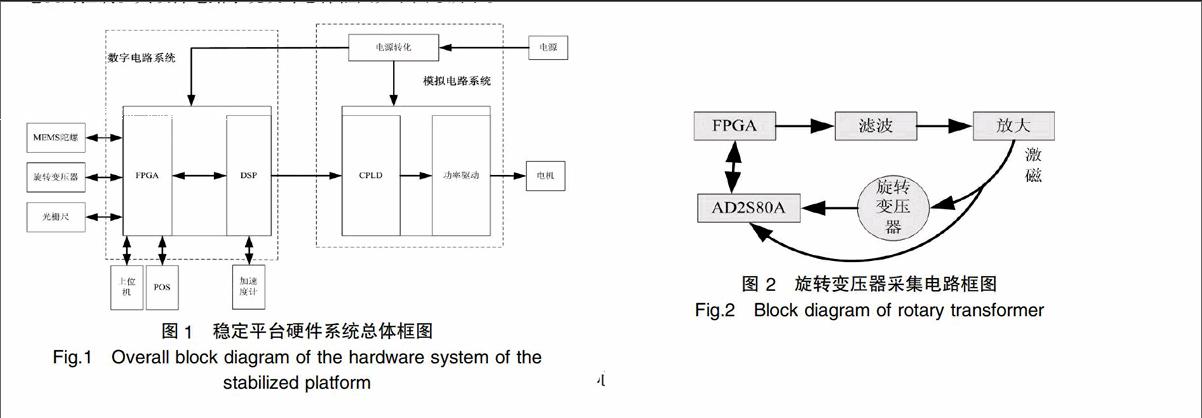
稳定平台电路采用以FPGA+DSP为核心的数字、模拟混合电路系统,主要包括数据采集、信息处理、电机驱动、电源转换等部分。数据采集部分主要包括陀螺角速率、旋转变压器、光栅尺、POS(高精度定位定向系统)等信息的采集。信号处理部分以DSP处理器为核心,通过外设接口的地址总线、数据总线、控制总线将FPGA中的数据读到内存中[2],然后经过相应的数据处理和控制策略解算,输出驱动电机的使能信号和PWM信号。电机驱动部分主要包括功率放大、光耦隔离、电机换向等部分。由CPLD根据霍尔信号产生电机控制的换向表。电机使能信号、功放后的PWM信号和换向表三者共同作用实现对无刷电机的控制。其硬件电路系统设计总体框图如下图1所示。
惯性稳定平台系统采用通过FPGA+DSP协同处理的主要基于FPGA和DSP各自的优势决定。FPGA支持并行和流水结构。这样可以通过多个处理单元并行工作,很适合多传感器的数据的并行采集。由于FPGA在复杂算法实现的局限性,因此,在FPGA的基础上增加DSP核,以提高控制回路的计算能力。同时,DSP专注于回路的控制运算,从而提了系统的响应速率。
2 数字电路系统设计
惯性稳定平台硬件电路系统主要分为FPGA模块和DSP模块。其中FPGA选择XILINX公司生产的XC3S500E,该FPGA拥有丰富的逻辑资源和乘法器资源,能够充分满足设计任务对传感器数据采集和处理的要求,并为后续的功能扩展预留了足够的逻辑资源[3]。而DSP选择TI公司生产的TMS320F2812,具有较高的性价比,灵活的指令系统和操作性能,高速的运算性能。把最适合电机和运动控制应用的外围设备嵌入到其中。其DSP运算主频可达150MHz,可以满足系统对控制回路计算的任务要求。
2.1 FPGA模块
惯性稳定平台系统对数字量输出的传感器,可以采用串行通信的方式进行数据采集。其中MESM陀螺和光栅尺采用RS-422接口,POS采用RS-232接口。FPGA模拟串口通信的接口协议完成MESM陀螺、光栅尺、POS数据的采集。而旋转变压器输出的是正余弦的模拟信号,需要通过一个轴角转换芯片AD2S80A转化为数字量,便于FPGA采集。
根据任务精度的要求不同,旋转变压器的采集可以分为单通道和双通道。单通道RDC转换电路具有结构简单、抗冲击性能和抗震性能良好、可靠性高、成本相对较低等优点[4],主要应用与精度要求不太高的场合。本文采用单通道旋转变压器的数据采集,其硬件电路原理框图如图2所示。
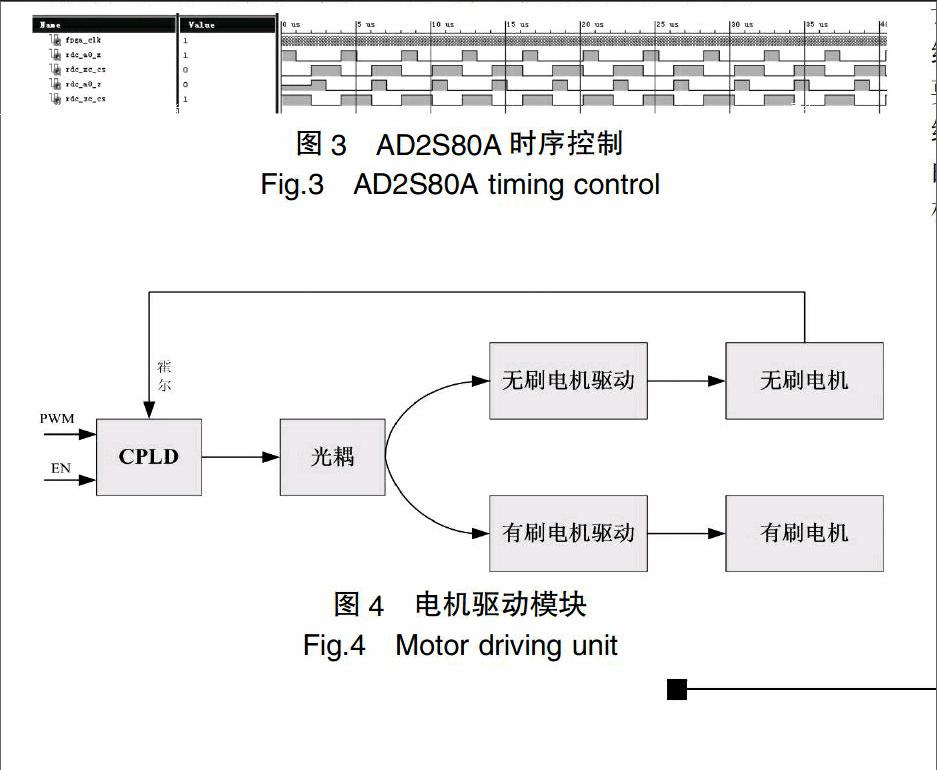
FPGA通过逻辑单元进行分频产生2KHz的方波信号,通过一个中心频率为2KHz带宽为100Hz的二阶带通滤波,选择基频为2KHz的正弦信号,在经过比例放大电路,放大到均值为4V,最大能够提供0.75A的电流,频率为2KHz的正弦波作为旋转变压器的激磁信号。然后通过FPGA生成AD2S80A轴角转换芯片的控制时序,完成轴角转换芯片对旋转变压器的采集。其RDC控制时序图如下图3所示。
其中fpga_clk为时钟信号;rdc_xc_cs和rdc_zc_cs分别为x轴和z轴的AD2S80A端口的控制信号;rdc_a0_x和rdc_a0_z分别为x轴和z轴的位选信号。
2.2 DSP模块
DSP主要负责陀螺稳定回路、姿态调平/跟踪回路、位置锁定回路的控制计算;电机控制量PWM;使能信号的输出。此外DSP利用其嵌入式SPI外设接口实现对加速度传感器的A/D采集和数据处理、DSP通过并行总线和FPGA进行数据交互。
系统选用的加速度计为石英绕性加速度计。石英绕性加速度计输出信号是与外部加速度成正比的输出电流信号,此信号需要经过一个高精密采样电阻转化为电压信号[3],在通过模拟滤波后,接入到AD7734芯片的输入端,然后DSP利用其SPI接口外设对AD7734进行数据采集。
3 模拟电路系统设计
模拟电路系统主要功能有过流保护、过压保护、电压转换、信号光耦隔离、方位无刷电机的换相和驱动、俯仰和横滚有刷电机驱动信号功率放大;系统方位轴电机选用直流无刷力矩电机。直流无刷力矩电机采用霍尔元件做位置传感器实现位置反馈,利用电机霍尔信号产生精确的换相控制[5]。稳定平台的俯仰、横滚轴端的电机则是选用直流有刷电机。其电机驱动框图如图4所示。
4 结束语
本文介绍了磁悬浮稳定平台的硬件组成。设计一种基于FPGA+DSP的稳定平台控制系统,利用FPGA和DSP各自优势,简化电路设计,提高系统的响应速率。系统主要分为两个部分,数字电路系统是系统计算处理的核心,主要负责信息的采集和处理,模拟电路系统是主要负责电机的驱动和系统电源的供应。通过硬件系统测试,该设计系统中FPGA能够实时的、稳定的采集传感器数据;DSP能够准确、实时的完成回路的控制运算;CPLD能够产生精确的换向表完成对回路电机的控制。
【参考文献】
[1]周向阳,房建成,俞瑞霞,等.一种高精度大负载惯性稳定平台方位支承系统的制作方法[P].中国,201210377506[P].2013-01-16.Zhou Xiangyang,Fang Jiancheng,Yu Ruixia.A method for manufacturing high precision and large load intertia stabilized platform bearing system[P]: China,201210377506[P].2013-01-16.
[2]官涛.基于FPGA+DSP的振动主动控制器的研制[D].哈尔滨工程大学,2012.Guan Tao.Design of Active Vibration Controller Based on FPGA and DSP[D].Harbin Engineering University,2012.
[3]丁楠,丁伟,蒋鸿翔.基于FPGA和DSP的光电吊舱控制系统设计与实现[J].导航与控制,2013,12(4):21-24.Ding Nan,Ding Wei,Jiang Hongxiang.Design and Realization of Control System on Electro-Optical Pod Based on DSP and FPGA[J].Navigation and Control,2013,12(4):21-24.
[4]彭俊峰,姬建伟,宋家友,等.三种轴角数字转换电路的分析与比较[J].微计算机信息,2006,17(6-2):8-10.Peng Junfeng,Ji Jianwei,Song Jiayou.Analysis and comparison of three kinds of resolver-to-digital conversion circuits[J].Microcompute Information, 2006,17(6-2):8-10.Wen Ting,Liu Xiaofang,Yang Xu.Data acquisition system of quartz accelerometer based on DSP[J].Computer Measurement & Control, 2010.18(11):2659-2662.
[5]陈永华.霍尔效应在无刷直流电机控制中的应用[J].实验科学与技术,2011,09(2):34-36.Chen Yonghua. Application of hall effect in the control of brushless DC motor[J].Experiment Science and Technology,2011,09(2):34-36.
[责任编辑:王楠]
