船载测量设备轴角编码器误差修正方法研究*
2016-03-02钟德安
包 飞,倪 兴,钟德安,刘 扬
(中国卫星海上测控部,江苏江阴 214431)
船载测量设备轴角编码器误差修正方法研究*
包 飞,倪 兴,钟德安,刘 扬
(中国卫星海上测控部,江苏江阴 214431)
船载无线电测量设备进行标校时,几套测量设备指向固定目标所测得的俯仰指向角度经修正后与大地测量所得角度存在约20″到30″的误差。多次检测后表明:该问题主要由设备俯仰轴角编码器误差导致。因此对传统的轴角编码器精度的检测方法提出了新要求,增加了检测密度和范围,并拟合出了编码器误差修正公式。经过试验任务数据验算,该方法比以往的修正方法效果更好,该测量设备的俯仰测角总精度在原来的基础提高了约15″。
轴角编码器;误差修正;精度检测
0 引言
轴角编码器是测量设备重要的测角部件。设备角度测量是由轴角编码器来完成的,其基本功能是把天线各轴的机械转角变为数字量的角度数据输出[1]。影响轴角编码器精度的因素很多,主要包括码盘加工精度、旋转变压器的轴与天线机械轴间的耦合精度及同心度、传感器电路引起的误差、数码读出电路引起的误差等。
船载测量设备进行标校时,几套测量设备指向固定目标所测得的俯仰指向角度经修正后仍与大地测量所得角度存在约20″到30″的误差。通过进一步分析发现,设备俯仰轴角编码器虽然总的精度满足要求,但是在具体角度上,其精度远低于要求,导致设备的瞬时测量值误差较大。基于此,文中以俯仰轴角编码器为例,提出了新的轴角编码器误差修正方法。
1 轴角编码器基本情况介绍
轴角编码器主要分为直接角度编码器和间接角度编码器两种。直接角度编码器将天线轴的角位移直接转换为数字化角度数据,可分为直读式码盘(如接触式码盘或光电码盘[2])和“增量积累”的增量码盘。间接角度编码器是先将天线机械轴的转角通过传感器(如电位器)变为连续的物理量(电压、时间间隔),然后再转换为数字化角度数据。
船载测量设备轴角编码器采用使用旋转变压器作为角度位移传感器的轴角编码器,并采用套轴式联接来提高旋转变压器轴和天线机械轴间的耦合精度。
2 船载无线电测量设备轴角编码器误差修正现用方法
船载测量设备轴角编码器误差修正现用的方法主要分为两步:第一步先检测编码器精度,若精度满足指标要求(一般要求轴角编码器精度比测量设备总精度高3~10倍[3]),则设备测角误差可不进行编码器误差的修正;第二步,若编码器精度不满足指标要求,则通过残差拟合进行误差修正。
2.1 轴角编码器精度检测方法
对轴角编码器精度检测主要采用与高精度测角仪器直接比对的方法,具体检测方法见参考文献[4]。以俯仰轴角编码器精度检测为例,采用重力感应角摆仪检测其精度包括以下步骤:
1)将角摆仪安装在测量设备俯仰旋转中心;
2)将天线指向俯仰为0°左右的位置,设置间隔参数为10°并清角摆仪初始读数为0°;
3)从下往上转动天线进行上测,每转动10°左右停转,并记录角摆仪读数Eji与设备俯仰编码器读数Eci直到90°;上测结束后进行下测,将天线从俯仰90°左右位置向下转动天线,每转动10°左右停转,并记录角摆仪读数Eji与设备俯仰编码器读数Eci直到0°;
4)按下式计算俯仰编码器精度:
(1)
ΔEi=(Eci-Eji)-Σ(Eci-Eji)/n
(2)
(3)
(4)
(5)
式中:n为测试的点数;ΔEi为第i次上测或下测时俯仰轴角编码器读数与测角仪读数之差的残差;σ为俯仰轴角编码器的上测或下测的均方根误差;Δ为上测与下测回差;δ为编码器精度。
2.2 轴角编码器误差修正现用方法
轴角编码器误差的残差拟合修正方法见参考文献[5]。
3 船载测量设备轴角编码器误差修正改进方法
3.1 方法原理概述
从多次的实际检测结果看,编码器精度并不能完全反映编码器误差对设备测量误差的影响,在某些角度上编码器误差可超过精度3倍以上,极大的影响了测量设备的测角值。为解决该问题,对原来的方法做了相关改进:
1)不再以轴角编码器精度是否满足要求作为误差修正的先决条件;
2)提高检测点密度,尽可能得到最真实的各个角度值上的实测误差值;
3)使用具体角度值上的实测误差值作为数据源拟合出角度测量值修正公式,直接对角度测量值进行修正而不是对最后的总测角精度进行修正,减少了中间环节误差。
3.2 轴角编码器误差修正改进方法
3.2.1 误差修正数据获取
以俯仰轴角编码器为例,采用3.1节中的方法,改变检测点密度和角度范围后得到角摆仪读数Eji与设备俯仰编码器读数Eci。依据检测点密度与角度范围的不同,得到3组实验数据:第一组为间隔5°一个检测点,角度范围为0°~180°,如表1;第二组为间隔1°一个检测点,角度范围为0°~90°,如表2;第三组为间隔0.3°一个检测点,角度范围为0°~6°,如表3。
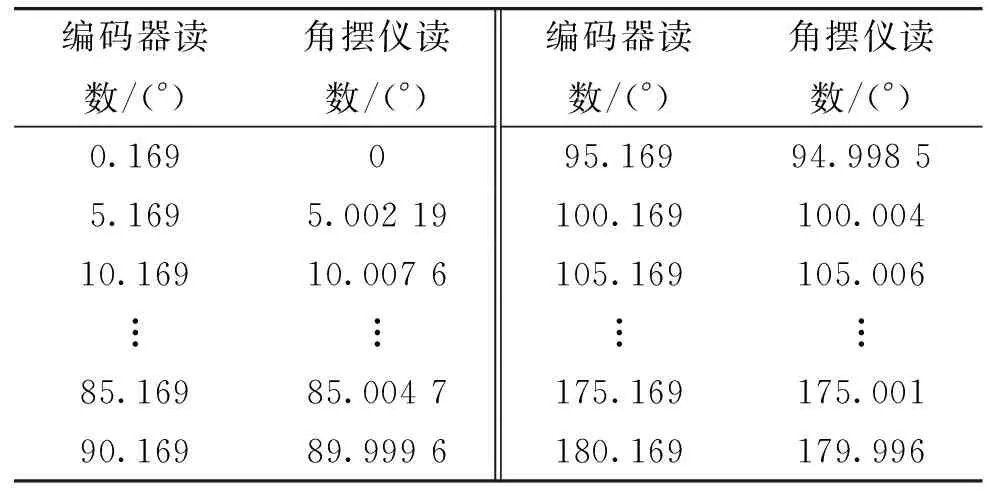
表1 ××设备俯仰轴角编码器检测数据(5°间隔)

表2 ××设备俯仰轴角编码器检测数据(1°间隔)

表3 ××设备俯仰轴角编码器检测数据(0.3°间隔)
3.2.2 误差修正方法改进
将表1、表2、表3中的数据使用式(6)进行处理以得到对应的角度误差值。
ΔEgi=(Eci-Eji)-(Ec1-Ej1)
(6)
式中:ΔEgi为俯仰轴角编码器值误差,即修正初始零值后的第i次上测或下测时俯仰轴角编码器读数与角摆仪读数之差;Ec1为第1次上测或下测时俯仰轴角编码器读数;Ej1为第1次上测或下测时角摆仪读数。
表1数据处理结果如表4所示,表2数据处理结果如表5所示,表3数据处理结果如表6所示。
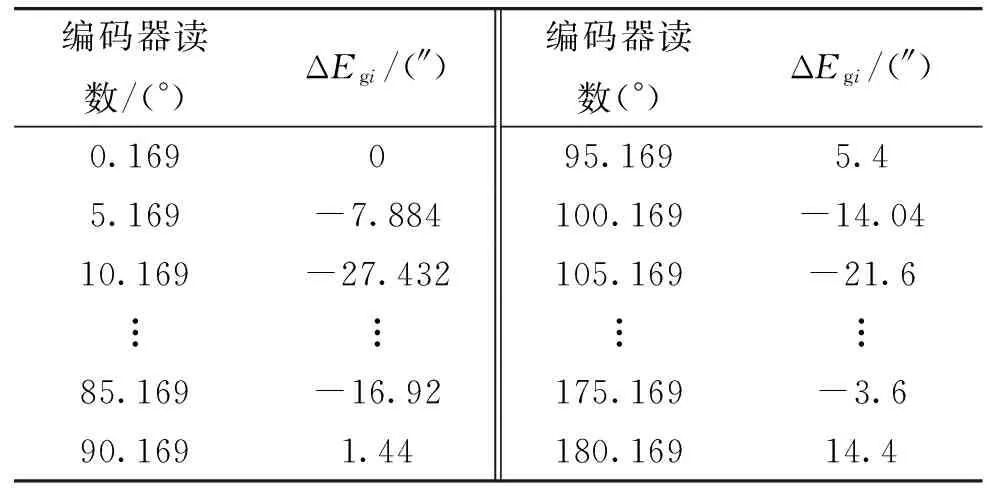
表4 ××设备俯仰轴角编码器误差处理结果(5°间隔)
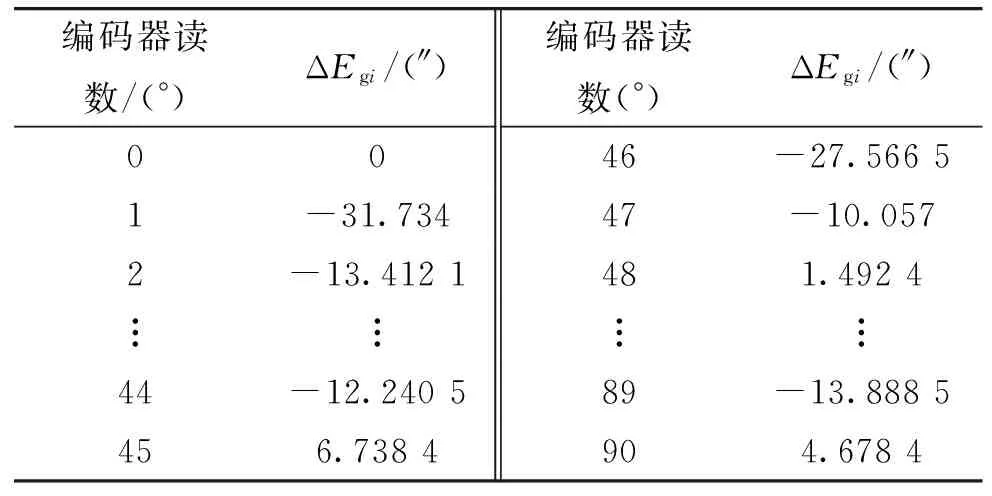
表5 ××设备俯仰轴角编码器误差处理结果(1°间隔)

表6 ××设备俯仰轴角编码器误差处理结果(0.3°间隔)
表4数据如图1所示,图中X轴为编码器俯仰角度值,Y轴为ΔEgi,曲线上各点所标数值为俯仰角度值。
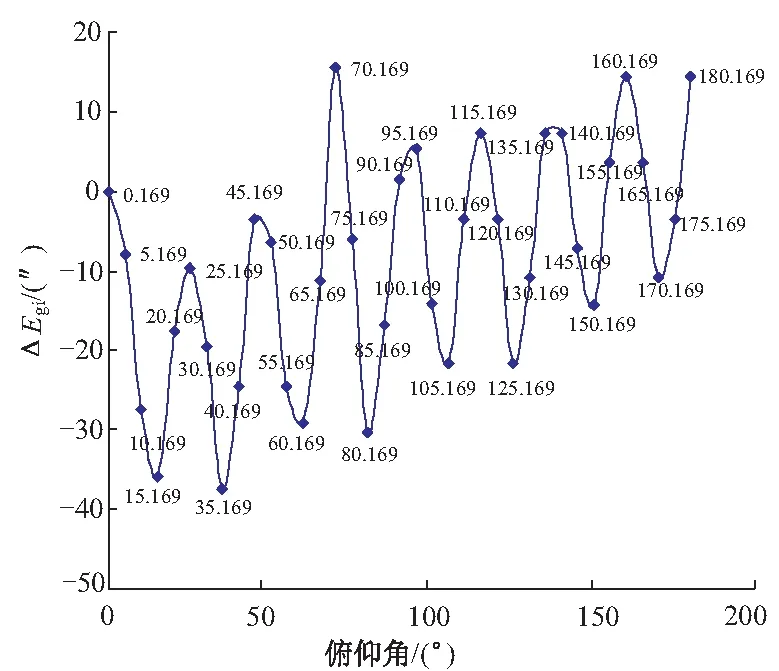
图1 ××设备俯仰轴角编码器误差曲线(5°间隔)
表5数据如图2所示,图中X轴为编码器俯仰角度值,Y轴为ΔEgi,曲线上各点所标数值为俯仰角度值。

图2 ××设备俯仰轴角编码器误差曲线(1°间隔)
表6数据如图3所示,图中X轴为编码器俯仰角度值,Y轴为ΔEgi,曲线上各点所标数值为俯仰角度值。

图3 ××设备俯仰轴角编码器误差曲线(0.3°间隔)
3组实验数据处理结果:第一组数据所得角度值误差近似峰峰值约35″,周期约为25°的余弦或正弦函数;第二组数据所得瞬时值误差近似峰峰值约30″,周期约为2.812 5°的余弦或正弦函数;第三组数据所得瞬时值误差近似峰峰值约30″,周期约为2.7°的余弦或正弦函数。
经分析比较,第一组数据由于检测间隔较大,误差曲线不能完整反映编码器误差分布情况,但检测角度范围完整,偏心误差可较明显的反映出来;第二组数据与第三组数据基本吻合,认为较真实的反应编码器误差分布情况,但所测角度范围较窄,因此,对误差曲线进行拟合时需结合第一组数据。
综合3组误差曲线数据分布规律,拟合可得该编码器角度误差近似公式:
ΔEg=-15sin(128Ec-90°)+0.08Ec-15
(7)
式中:Ec为编码器读数,单位为(°);ΔEg为编码器瞬时值误差参数,单位为(″)。
3.3 轴角编码器误差修正改进方法的效果验证
将该设备执行的多个任务的俯仰角测量数据作为数据源,经式(7)修正后重新进行测量精度处理,并与原来的精度处理结果做比较。
下面给出4个进入的任务数据验证情况,如表7所示:设备标准模式下2个进入的残差均值分别变小了15.6″和14.9″,残差均方根值分别变小了0.3″和变大了2.5″;扩频模式下2个进入的残差均值分别变小了16.3″和12.5″,残差均方根值分别变小了4.8″和4.7″。
从数据处理结果看,设备的俯仰系统误差的残差均值和随机误差的残差均方根值均得到改善,设备俯仰角测角总精度较以往提高了约15″,轴角编码器误差修正效果较好。
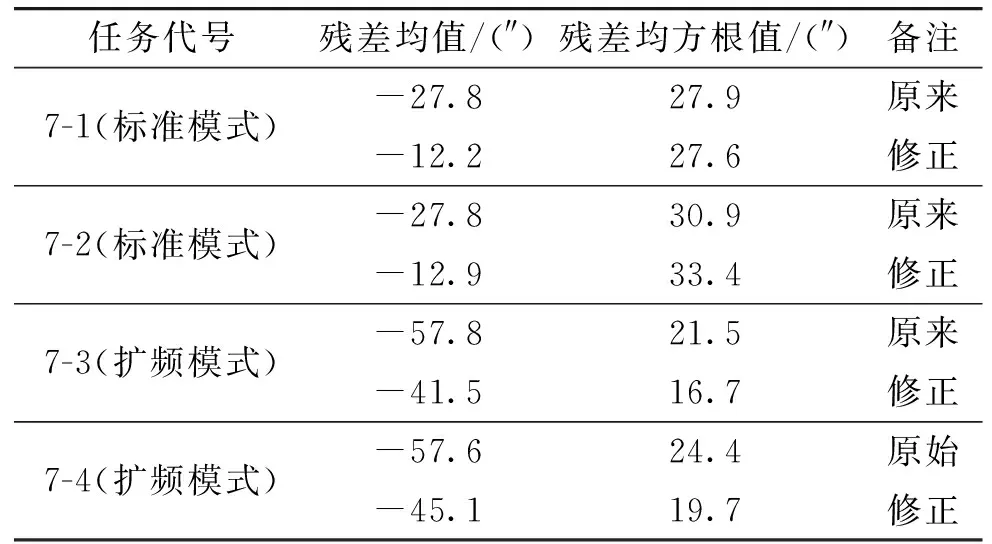
表7 ××设备俯仰轴角编码器误差修正验算情况
4 结束语
无线电测量设备轴角编码器误差对设备的测量精度有着直接影响,通过实测轴角编码器在各角度值上的误差并进行数学拟合,得到了误差与角度值的关系公式,经任务数据验证,使用该公式进行轴角编码器误差修正后设备测量总精度较以往得到明显提高。但该方法还存在一定的局限性,所得的误差公式是由实测误差值拟合而来,因此不同的轴角编码器其误差公式不同,即误差公式不能通用。
[1] 赵业福, 李进华. 无线电跟踪测量系统 [M]. 北京: 国防工业出版社, 2001: 98.
[2] 罗世魁, 王国强, 王继新, 等. 伪随机码在绝对式光电轴角编码器中的应用 [J]. 光学精密工程, 2003, 11(6): 596-601.
[3] 江文达, 陈道桂. 航天测量船 [M]. 北京: 国防工业出版社, 2002: 36-38.
[4] 钟德安. 航天测量船测控通信设备标校与校飞技术 [M]. 北京: 国防工业出版社, 2009: 99-100.
[5] 钟德安, 包飞, 张同双, 等. 测量设备轴角编码器误差修正研究 [J]. 无线电工程, 2012, 42(9): 51-53.
Research on Error Correction in Axial Angle Encoder of Ship-borne Measuring Equipments
BAO Fei,NI Xing,ZHONG De’an,LIU Yang
(China Satellite Maritime Tracking and Controlling Department, Jiangsu Jiangyin 214431, China)
When ship-borne wireless measuring devices are measuring and calibrating, they have 20″ to 30″ error value between the angle values got by measuring devices and that got by the earth measuring. According to tests, the problem is mainly caused by the error of axis angle encoder. So, new requirements were made for detection method of the axial angle encoder, detection density and scope increased, and correction formula of the encoder error was fit. After the test checking, the effect is better than the previous methods, the total accuracy of the measuring equipment has been improved by about 15″.
axial angle encoder; error correction; precision detection
2015-10-12
包飞(1981-),男,江苏淮安人,工程师,硕士,研究方向:标校、校飞。
V557
A
