基于改进Otsu算法在前方目标车辆识别中的研究
2016-02-27霍春宝
洪 浩,霍春宝,王 京,王 燕
(1.辽宁工业大学 电气工程学院,辽宁 锦州 121001;2.辽宁省电力有限公司锦州供电公司,辽宁 锦州 121001;3.北京印刷学院 机电工程学院,北京 102600)
基于改进Otsu算法在前方目标车辆识别中的研究
洪 浩1,霍春宝1,王 京2,王 燕3
(1.辽宁工业大学 电气工程学院,辽宁 锦州 121001;2.辽宁省电力有限公司锦州供电公司,辽宁 锦州 121001;3.北京印刷学院 机电工程学院,北京 102600)
在防碰撞预警系统中,使用常见的图像分割算法识别车辆时,易造成目标的特征信息丢失以及边缘模糊化的现象,因此文中采用了一种基于最大类间方差法与遗传算法相结合的分割算法。该算法先用正态分布概率密度函数确定前方车道区域灰度值的阈值范围;然后对遗传算法的初始种群进行交叉、变异操作以寻找分割阈值的最优解;在此基础上,结合最大类间方差法的自适应性,在给定的阈值范围内进行局部最优搜索;最后,获取图像分割的最佳阈值。研究结果表明,在光线昏暗、摄像头破损等情况下,改进算法具有很好的识别性,它不仅能有效地分割出目标车辆与背景,同时还大大地缩短了运行时间,提高了分割的时效性。通过Matlab仿真实验得出,改进算法在前方目标车辆识别中有明显的优势。
防碰撞预警系统;车辆识别;最大类间方差法;遗传算法;图像分割
0 引 言
图像分割是计算机图像处理的一个重要环节。图像分割是指根据图像的灰度、颜色、纹理、几何形状等特性,提取出感兴趣区域的过程[1-3]。然而,如何快速、准确、自适应地识别前方目标车辆是一个十分重要的问题。在防碰撞预警系统中,经过对前方道路路面区域采用Hough变换得到理想的车道线后,就能有效地把路面区域划分为车道区域和非车道区域[4-5]。同时,为了有效利用阴影特征识别前方目标车辆,可以将检测范围缩小到车道区域,这样就能提高前方车辆检测和跟踪的精度,避免了非车道区域造成的干扰。但是,道路路面区域的灰度值是不均匀的,在摄像机距离远的区域内颜色较浅,像素灰度值较大;摄像机距离近的区域内颜色较深,像素灰度值较小[6]。如果直接在ROI(Region Of Interest)区域内使用Otsu法进行车辆与背景的分割,近景的一部分道路也会误检为目标。因此,如何准确地、清晰地把目标车辆从背景中分离是一个十分关键的问题。分离的好坏将直接影响目标车辆的跟踪精确性以及预警系统的稳定性。
为了解决这个问题,文中采用基于最大类间方差法与GA相结合的分割算法。该方法不仅能够较清晰地分离出目标车辆,还可以大大节省目标搜寻时间,提高了目标车辆分离的时效性。
1 Otsu阈值分割算法
Otsu阈值分割算法是在1978年由日本学者大津提出的。它是一维最大类间方差法,是在结合了最小二乘法原理的基础上推导出来的[7-8]。该算法是一种自适应的、有效的图像分割算法。它通过衡量目标区域的灰度均值、背景区域的灰度均值以及整幅图像的灰度均值之间的方差来选取最佳阈值。当方差越大时,目标区域就越能从背景区域分割出来。
1.1 Otsu算法基本原理
Otsu算法的基本原理[9-11]是利用一阈值先把原图像分成目标和背景两部分,然后分别计算当前阈值下目标部分和背景部分的区域概率、区域平均灰度以及图像的总平均灰度和类间方差,并采用遍历的方法使类间方差达到最大,此时的阈值就是最佳阈值。Otsu法对图像中的噪声和目标部分的大小十分敏感,它仅对类间方差为单峰的图像有较好的分割效果。同时,该方法不需要人为设定参数,是一种自适应的阈值选择方法。它不仅适用于两个区域的单阈值选择,也适用于多区域的多阈值选择。
1.2 Otsu算法的公式推导

(1)
各灰度值出现的概率为:
(2)
对于pi,有:
(3)
设T把图像中的像素分成C0和C1两类,在[0,T-1]区间的像素组成C0,在[T,L-1]区间的像素组成C1[12]。则区域C0和C1的概率分别为:
(4)
(5)
区域C0和C1的平均灰度分别为:
(6)
(7)
其中,μ是整幅图像的平均灰度。
(8)
此时,区域C0和C1的内部方差为:
(9)
(10)
两个区域的总方差为:

2 改进的Otsu阈值分割算法
(12)
其中,μ为车道区域灰度的平均值;δ为车道区域灰度的方差。
根据图1可知,正态变量在[μ-3δ,μ+3δ]区间范围内的概率高达99.7%以上,在[-,μ-3δ]和[μ+3δ,+]区间范围内概率极小,那么最优阈值必在[μ-3δ,μ+3δ]范围内。
改进算法流程如下:
(1)选取N个小矩形窗口,每一个窗口大小为50*50像素,且每个窗口间隔50像素,这样的区域采样能够获取最接近车道区域实际灰度值的取样值。
(2)分别计算出小矩形窗口各自的灰度均值μi和方差均值δi,选取它们的灰度均值和方差均值的平均值作为该车道区域的灰度值μm和方差值δm。


图1 正态分布概率密度函数
(4)随机产生N个第一次寻优的初始种群,通过bs2rv函数进行二进制码和实值的转变(N=10)。
(5)计算种群中各个个体的适应度值:f(X11)-f(X1N),公式如下:
P1=S1/I,P2=S2/J


(6)选择。以Matlab中GA的select作为选择程序,设代沟GAP=0.9,即每次遗传后子代数量为父代的90%,没有完全被复制,有部分剩余。
(7)交叉。打乱种群中个体的顺序,然后随机排序,两两组成新的一组,并根据事先预定的交叉概率进行交叉操作,生成新一代种群(交叉概率Pc=0.7)。
(8)变异。使用变异概率Pm(Pm=0.4)变异当前种群每一行相对应的一个个体中的每一个元素,进而形成新一代群体。
(9)终止。设定指定代数G(G=150)作为寻优循环跳出的判断条件,如不满足,则此时的第一代群体是新生成的群体,然后转到步骤(3)继续寻优;否则转到步骤(7)。
(10)若终止条件满足,则GA最优解输出就是最后一代群体中适应度最大的个体,再将其反编码,得到对应的十进制灰度值t,则t就是GA得到的阈值。
(11)依据设定的阈值A,结合最大类间方差法在[t-A,t+A]范围内进行局部最优搜索,即求得图像分割的最佳阈值。
3 实验结果与分析
为了验证改进的Otsu阈值分割算法的优越性,文中分别对图2中的两幅不同的车道区域进行仿真实验。

图2 两种不同路面的车道区域
实验平台是Pentium4,内存为1G,运行环境为MATLAB7.0。
从图3(a)和图4(a)可知,在进行车辆识别前,先对车道区域进行粗提取,把非有效区域,如天空区域等去除,得到ROI区域,这样不仅可以提高目标车辆跟踪的精确度,也节省了计算量。

图3 用不同的方法得到普通车道区域的目标车辆识别结果
从图3(b)、(c)和图4(b)、(c)可以看出,Otsu算法的分割结果不能完整、清晰地把目标车辆从背景中识别出来,这样会给车辆的目标跟踪造成误检,而改进的Otsu算法对于普通的车道区域或者带有标识线的车道区域都能较好地分离目标和背景,提取车辆底部的阴影区域。因此,文中提出的改进算法更能满足实时性的需求。
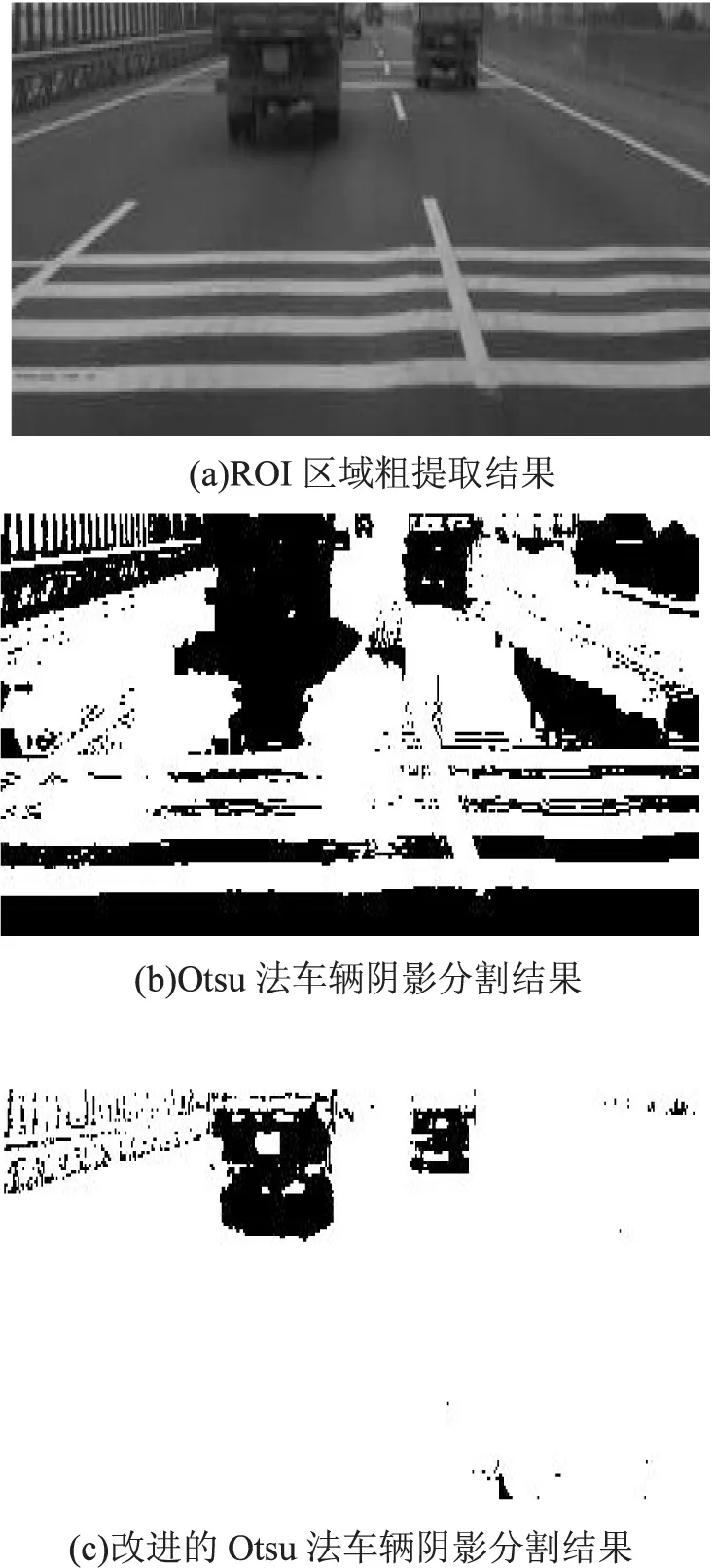
图4 用不同的方法得到带有标识线车道区域的目标车辆识别结果
同时,为了验证改进算法的运行速度和性能,表1给出了比较结果。

表1 改进算法与传统Otsu算法运行时间与阈值的比较
4 结束语
面对现有的Otsu算法在不同的车道区域识别目标车辆时出现的完整性和清晰性等问题,文中提出了一种改进算法。先在车道区域内求取各个区域各自的灰度均值和方差,然后根据车道区域的像素灰度值符合正态分布来设定理想阈值的范围,同时利用遗传算法的并行特性,并结合传统的Otsu算法。实验结果表明,改进算法具有良好的可行性,与传统的Otsu算法相比,改进算法分割效果更明显,并且大大减少了计算量和运行时间。所以文中提出的改进算法具有较好的识别性。
[1] 褚巧龙.基于Otsu的图像阈值分割算法的研究[D].秦皇岛:燕山大学,2014.
[2] 丁红军,蔡鸿杰,邢克礼.遗传神经网络在图像分割中的应用研究[J].自动化技术与应用,2010,29(3):8-12.
[3] 李俊山,李旭辉.数字图像处理[M].北京:清华大学出版社,2013:26-28.
[4] 冯 月.基于单目视觉的前方车辆检测和测距方法研究[D].北京:北京化工大学,2013.
[5] 胡会珍.基于视觉的运动车辆识别与跟踪方法研究[D].太原:中北大学,2012.
[6] 李 青,郑南宁,马 琳,等.基于主元神经网络的非结构化道路跟踪[J].机器人,2005,27(3):247-251.
[7]ZhangS,BebisG,MillerR.On-roadvehicledetectionusingopticalsensors:areview[C]//ProceedingsofThe7thInternationalIEEEconferenceonintelligenttransportationsystems.[s.l.]:IEEE,2009:585-590.
[8] 张东生.基于阈值的图像分割算法研究[D].大庆:东北石油大学,2011.
[9]LinZH.ThecellimagesegmentationbasedontheK-LtransformandOTSUmethod[C]//Proceedingsof2011internationalconferenceonmultimediaandsignalprocessing.Washington,DC:IEEEComputerSociety,2014:25-28.
[10] 郑 宏,潘 励.基于遗传算法的图像阈值的自动选取[J].中国图象图形学报,2009,4(4):327-330.
[11] 吴成柯,刘 靖,徐正伟,等.图像分割的遗传算法方法[J].西安电子科技大学学报,1996,23(1):34-41.
[12] 黄建新,刘 怀,黄 伟.基于遗传算法的图像分割阈值选取[J].南京师范大学学报:工程技术版,2007,7(1):14-17.
[13] 侯格贤,吴成柯.图像分割质量评价方法研究[J].中国图象图形学报,2010,5(1):39-43.
[14] 汪筱红,须文波.基于遗传算法的阈值图像分割研究[J].太原师范学院学报:自然科学版,2007,6(3):111-113.
[15] 高广春,熊 凯,赵胜颖,等.自适应小波变换更新滤波器的优化研究[J].电路与系统学报,2011,16(3):81-86.
[16] 袁超伟,王桃荣.基于第二代小波变换的多分辨率图像水印方案[J].北京邮电大学学报,2002,25(3):93-97.
Research on Front Target Vehicle Identification Based on Improved Otsu Algorithm
HONG Hao1,HUO Chun-bao1,WANG Jing2,WANG Yan3
(1.College of Electrical Engineering,Liaoning University of Technology,Jinzhou 121001,China;2.Power Company Limited of Liaoning Electric Power Supply Co.,Ltd.,Jinzhou 121001,China;3.School of Mechatronic Engineering,Beijing Institute of Graphic Communication,Beijing 102600,China)
In the anti-collision warning system,the common image segmentation algorithm in identifying vehicle often causes the phenomenon that loss of information about the target feature and edge blurring.Therefore,it puts forward an improved image segmentation algorithm based on the Otsu algorithm and GA in this paper.This algorithm first confirms a threshold range of the front lane area by the normal distribution function,then crossovers and mutates the initial population of GA to search the optimal segmentation threshold.On this basis,combined with the adaptivity of Otsu,it searches the local optimum in the range of a set threshold.Finally,the optimal threshold of image segmentation is obtained.The results show that the improved algorithm has a good recognition performance in the light of the dim light and the damage of the camera.It not only can effectively segment the target vehicle and the background,but also greatly shorten the running time and improve the efficiency of the segmentation.Through simulation,the improved algorithm has obvious advantages in identifying the target vehicle in front.
anti-collision warning system;vehicle identification;Otsu;GA;image segmentation
2015-08-31
2015-12-04
时间:2016-05-25
辽宁省科技计划联合基金项目(2015020047);北京市青年教师拔尖人才项目(TXM2015-014223-000007)
洪 浩(1989-),男,硕士研究生,研究方向为图像分割、模式识别;霍春宝,教授,硕士研究生导师,研究方向为图像处理以及智能主动安全。
http://www.cnki.net/kcms/detail/61.1450.TP.20160525.1700.018.html
TP391.4
A
1673-629X(2016)06-0078-04
10.3969/j.issn.1673-629X.2016.06.017
