基于Paparazzi Lisa /M 2.0的无人机自主飞行设计
2016-02-24王俊明曹科才汪蓉蓉
王俊明,曹科才,肖 斌,汪蓉蓉
(南京邮电大学 自动化学院,江苏 南京 210046)
基于Paparazzi Lisa /M 2.0的无人机自主飞行设计
王俊明,曹科才,肖 斌,汪蓉蓉
(南京邮电大学 自动化学院,江苏 南京 210046)
四旋翼无人机是一种具有运动性能好、体积小、重量轻、结构新颖、环境友好(相对不易对周围造成伤害)等特点的无人机,在军事、民用及科研方面都具有很大的价值。Paparazzi是一个软硬件全开源的项目,始于2003年,旨在建立一个强大、自主的自动驾驶系统。文中首先介绍了Paparazzi Lisa/M 2.0与地面控制系统,然后在此基础上通过实际制作四旋翼无人机系统,针对分析研发过程中需要注意的问题以及关键步骤,成功制作了四旋翼无人机,并且完成了一系列的分析与测试。利用地面控制系统的导航控制能让四旋翼无人机完成自主导航、悬停和降落等一系列任务,并详细学习了路径规划控制的设计与仿真。通过仿真结果显示,Paparazzi Lisa/M 2.0与地面控制系统结合对四旋翼无人机进行路径规划控制的有效性和准确度,可以用于四旋翼无人机的路径规划指挥。
无人机;数据传输;自主飞行;路径规划
0 引 言
Paparazzi[1]是国外的一个开源项目,它以相对完美的软硬件系统和地面控制平台,获得国内外飞行器爱好者的一致喜爱和追捧。其硬件平台是以STM32微控制器为核心,配合多种传感器,如加速度计、陀螺仪、电子罗盘、气压计等,一些新的传感器(如视觉传感器[2-5])也可以进行尝试。如此良好的硬件条件使其具有更多的接口(拓展功能强大)和更强的兼容性(兼容固定翼和多轴飞行器);它的飞行算法在PID控制算法[6-7]的基础上,引入适当的自适应算法[8-9],使得无人机的稳定性以及对外部干扰的适应性大大增强;其通过地面控制站对无人机进行实时监测和在线控制,使得路径规划和自主飞行得以实现。
Paparazzi在业界有较高的知名度并曾摘取多项荣誉。在2013年9月结束的国际微型飞行器会议和飞行比赛(IMAV 2013)中,Paparazzi驱动的飞机获得户外组第一名,室内组操作第一名,室内自主控制第三名的成绩。其中,用到了最新的只有2.8 g重量的Lisa/S飞控板。可见Paparazzi在业内应用的广泛程度及其实力。
Paparazzi项目是无人机方面一个开放的大知识库,无论个人、公司、研究机构都能从中获益良多。未来,相信Paparazzi在无人机领域还会发挥更大的影响力。
1 地面站控制平台
地面控制平台在无人机控制系统中占据着非常重要的位置。利用地面站可以对无人机进行实时监控和在线控制,实现在有限的区域垂直起降,稳定的盘旋以及精确目标移动飞行控制[10]。同时,将路径规划算法[11]在地面站运行,减轻了飞行控制系统的运算负担,提高了无人机控制系统的实时性。
地面站主界面分为好几个面板:
设置(Configuration)面板可以通过A/C菜单添加或者修改已经配置好的文件为新飞行器的配置文件。
编译(Building)面板包括编译(Build)和下载程序(Upload)。
运行(Execution)面板中提供了一系列的预设和用户对话。比如可用在模拟选项中运行Server、GCS和模拟器。
1.1 模拟飞行
为了便于场地操作以及熟悉操作流程,事先进行模拟飞行是必不可少的环节。
(1)在A/C组合框中,选择目标飞行器(Quad_Lisa M2.0)。
(2)在Target组合框中,选择nps,并点击Build按钮。
Paparazzi目前提供三个不同的模拟器的飞行动力模型(Flight Dynamic Model,FDM)的后台,即:sim、jsbsim、nps。sim和jsbsim多用于固定翼飞行器,而nps为旋翼机提供,因此这里选择它。另外,前述FDM是一组数学方程,用于计算作用在模拟飞机上的物理量,如推力、升力和阻力。
(3)在Session组合框中,选择simulation,点击Execute按钮。弹出GCS窗口,此时在Paparazzi Center中,显示当前运行的代理进程(GCS,服务器和模拟器)。
(4)飞行任务可以提前下载地图,在连接GPS的情况下可直接加载地图,模拟飞行也没有用到地图的必要,因此省略此步骤。
(5)接下来在GCS中进行任务模拟飞行的操作就和后面的真实飞行一样了。经过GPS的初始化阶段(10 s左右),航线位于Holding Point区域。点击Takeoff转换到起飞区,根据模拟需要的飞行计划,进行飞行点设置,路径规划,即可开始飞行任务。
(6)模拟飞行期间所用的运行代理可以通过Session菜单被保存为一个会话,以备下次运行。飞行任务结束,点击Stop/Remove process,然后关闭Paparazzi Center。
1.2 场地飞行
在做好相应的飞行准备后可以进行飞行实验。
切换Radio Control到Auto_2(自主飞行)模式,无人机起飞。在Paparazzi Center面板的PFD窗口可以观察飞行姿态,Map区域实时显示飞行路线,根据数据反馈做出适当的调整。如果遇到突发事件,可快速做出反应。
其中,飞行计划中的HOME模式是一种错误保护模式。当正常飞航线被中止时,飞行器以一个安全高度围绕HOME路径点飞行。这种模式可由以下事件触发:
(1)在MANUAL或者AUTO_1模式时,飞行器丢失了Radio Control的上行连接。
(2)距离HOME路径点的距离超出飞行计划中设置的阈值(在GCS地图中用一个圆圈表示)。
1.3 实时绘图
在Paparazzi Center的Tools菜单中,启动一个报文代理。这个代理将显示所有飞行器送出的报文。
在Paparazzi Center的Tools菜单中,启动一个Real-time plotter代理。
拖动Messages窗口的BAT报文的Voltage数据域到Real-time plotter代理中。一条数据曲线被绘制出来并周期性地向左滚动。
2 文中主要工作
2.1 硬件设计
笔者制作的四旋翼无人机基于Paparazzi Lisa/M 2.0,这是一个开环控制系统,包括电子芯片、各种传感器模块[12]、GPS模块、导航算法[13]、无线数据传输模块等设备。要想顺利地使用该系统,首先要正确搭建硬件平台。下面先就Paparazzi Lisa/M 2.0硬件设计进行介绍。
Paparazzi Lisa/M 2.0硬件接口布局如图1所示。
Paparazzi Lisa /M 2.0的接口连接不多做介绍,这里主要介绍Paparazzi Lisa /M 2.0与地面站操作之间的数据传输,即数传模块。
数传模块可供选择的有很多,距离较近可以尝试3DR,距离较远的有Xbee[14]。在实际使用中,可以根据实际情况来进行选择,目前市面上的支持波特率为57 600的数传也可以试着使用。在地面站上也可以支持9 600的波特率,只是根据官网上的说明,9 600的波特率速度会慢一点。
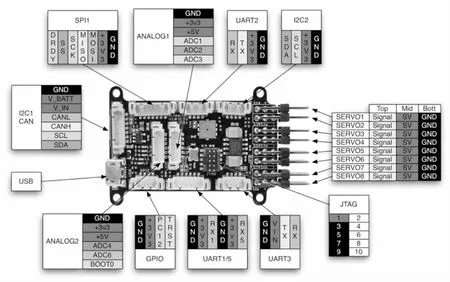
图1 PPZ飞控的接线图
在笔者制作的无人机中,经过重重考虑,最后选择的是RDF900数传电台915M远程数传Remote 900模块,在数次试飞实验中均具有较好的表现。
确定了选择的数传模块之后,接下来要做的就是连接硬件,即将Paparazzi Lisa/M 2.0与多旋翼无人机进行连接。
图2为Paparazzi Lisa/M 2.0与GPS、接收机、数传模块等的连接方法。因为文中着重讨论的是数传模块,下面将数传模块的连接方式做详细论述。
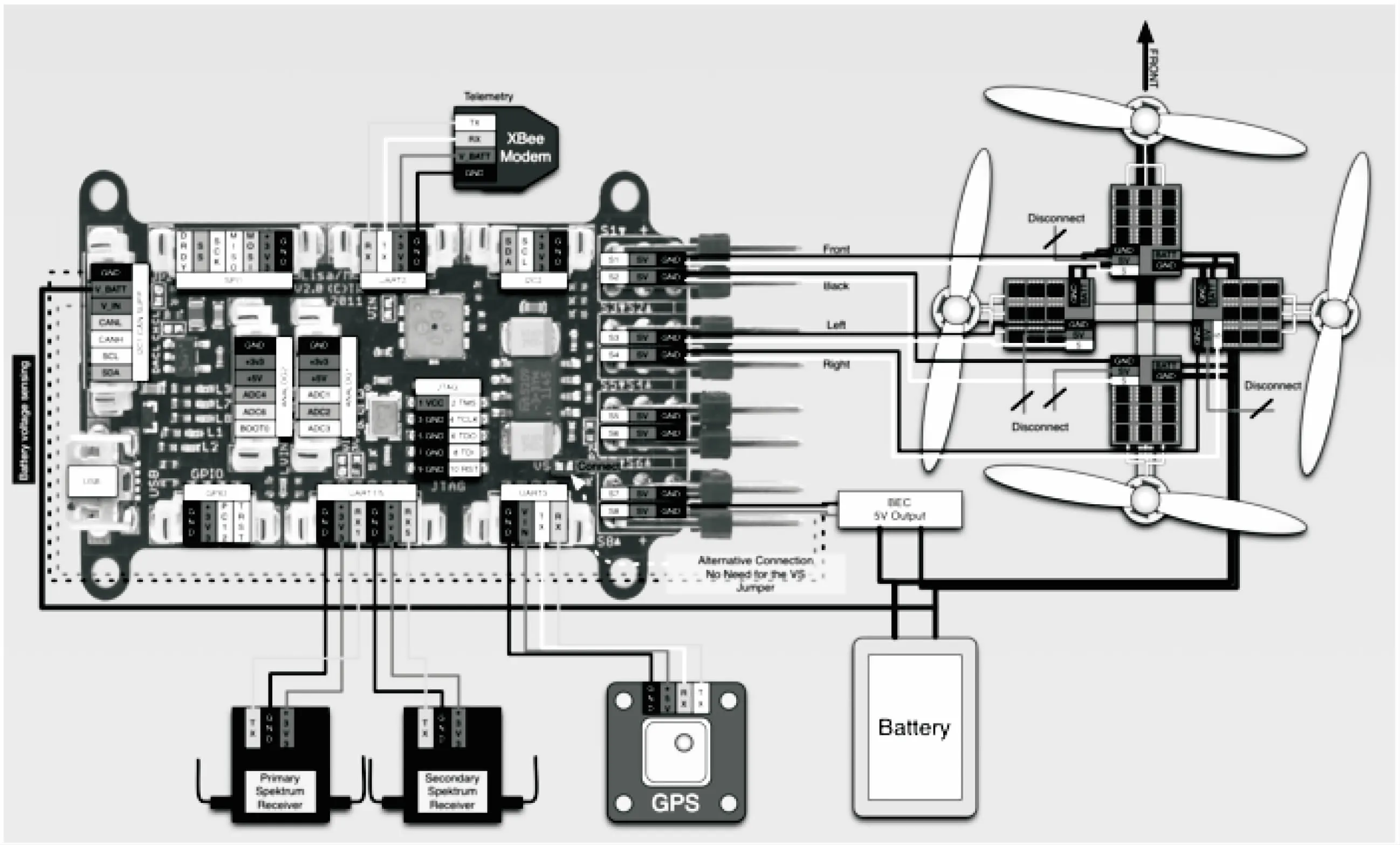
图2 PPZ飞控与多旋翼无人机连接方式
Paparazzi Lisa/M 2.0是通过数据传输的串口同地面站连接(通过数据传输的串口连接电脑)。数传模块为成对发挥作用,一个连接在PPZ上,另一个连接在PC机上作连通地面站之用,两个模块之间进行数据传输达到通信的作用。
连接方式如图3所示。
数传模块与Paparazzi Lisa/M 2.0相连的方式中,数传模块有RX、TX、+3.3 V和GND四个接口。RX为输入接口,与数传的TX接口相连;TX为输出接口,与数传的RX接口相连,以使得数据能够顺利进行传输。
图3 数传模块与PPZ的连接方式
与PC相连的时候,由于接口不一致,需要用USB转TTL接口进行连接。
2.2 软件设计
(1)关于机体(airframe)文件的配置与编写。
该四旋翼无人机机体呈现X形,所以四个电机分别命名:NE、SE、SW、NW。
当机体做翻滚(ROLL)、俯仰(PITCH)、偏航(YAW)、上升(THRUST)动作时,其中一个电机的转速系数如下所示。
(2)关于遥控器(radio)文件的编写。
首先,应该注意各通道信号的对应顺序与序号(ctl)无关,而是与各通道功能的定义顺序有关;其次,语句data_min是单个ppm波形脉宽最小时间,data_max是单个ppm波形脉宽最大时间,sync_min是整个脉冲串的最小长度时间,sync_max是整个脉冲串的最大长度时间,文中使用的ppm解码板类型为POSITIVE;再者,关于min、neutral和max值的获取,使用默认值即可;最后,ppm解码板默认输出8个通道,文中使用了6个通道,对于未使用的两个通道也要添加UNUSED标志。
(3)关于飞行计划(flight-plan)文件的编写。
alt是计划飞行高度,ground_alt是当地水平高度,lat0是飞行区域的纬度,lon0是经度。
(4)关于数传(telemetry)文件的配置。
数据的类型有default、ppm、raw_sensors、scaled_sensors、ahrs等13个种类,配置信息主要包含了各种类型传回哪些数据和传回数据的周期。在ppz地面站中,可以通过选择数据类型,精确地读取传回到message文件的数据,从而达到监视无人机的各项飞行指标和参数。
3 实 验
3.1 仿 真
为了比较稳妥地进行试飞实验,先在地面站上进行了模拟仿真,如图4所示。模拟界面中飞行器飞行的路线为:HOME→P1→P2→P3→P4→P1。

图4 地面站仿真图
3.2 试飞实验
在进行了模拟仿真以及对硬件的调试,确定没有问题之后,在一片相对空旷的地方进行试飞实验。
如图5所示,途中P1、P2、P3、P4为设置的路径点。无人机在每到达一个点之后便根据地面站传送出的指令调整飞行方向,飞往下一个路径点。
实验数据表明,在无人机的飞行过程中能按照规划的路径进行自主飞行,顺利完成飞行任务,并且飞行轨迹较为稳定。这种自主飞行的设计能够大大减轻操作者的工作量,并且使无人机相对稳定的飞行,降低了危险性。

图5 飞行实验图
4 结束语
基于Paparazzi Lisa/M 2.0的无人机自主飞行设计,文中提出了一种无人机执行自主任务的解决方法。这种自主飞行设计可以用于执行地图覆盖式扫描,执行地图重构等方面的工作。文中在硬件设计、软件设计以及地面站控制及仿真方面做了介绍,基于Paparazzi Lisa/M 2.0,四旋翼无人机在仿真与实验中表现较为优秀,但Paparazzi Lisa/M 2.0仍然有很多地方值得深入研究和探讨。
[1] 刘物己.基于开源系统PAPARAZZI飞行控制器及四旋翼飞行器研制[J].机电元件,2014,34(6):24-32.
[2] Altug E,Ostrowski J P,Mahony R.Control of a quadrotor helicopter using visual feedback[C]//Proceedings of the 2002 IEEE international conference on robotics & automation.Washington D C:IEEE,2002:72-77.
[3] Altug E,Ostrowski J P,Taylor C J.Quadrotor control using dual camera visual feedback[C]//Proceedings of the 2003 IEEE international conference on robotics & automation.Taipei,Taiwan:IEEE,2003:4294-4299.
[4] Suter D,Hamel T,Mahony R.Visual servo control using homograthy estimation for the stabilization of an X-4 flyer[C]//Proceedings of the 41st IEEE international conference on decision and control.Las Vegas,Nevada,USA:IEEE,2002:1-12.
[5] 汤一平,叶永杰,朱艺华,等.智能全方位视觉传感器及其应用研究[J].传感技术学报,2007,20(6):1316-1320.
[6] 张 镭,李 浩.四旋翼飞行器模糊PID姿态控制[J].计算机仿真,2014,31(8):73-77.
[7] 江 杰,岂伟楠.四旋翼飞行器建模与PID控制器设计[J].电子设计工程,2013,21(23):147-150.
[8] 岳基隆.四旋翼无人机自适应控制方法研究[D].长沙:国防科学技术大学,2010.
[9] 陈国定,程嘉晖,张晓峰,等.四旋翼无人机飞行姿态模型参考自适应控制[J].计算机系统应用,2015,24(11):247-251.
[10] Erginer B,Altug E.Modeling and PD control of a quad rotor VTOL vehicle[C]//Proceedings of the 2007 IEEE intelligent vehicles symposium.Istanbul,Turkey:IEEE,2007:894-899.
[11] 张广林,胡小梅,柴剑飞,等.路径规划算法及其应用综述[J].现代机械,2011(5):85-90.
[12] 于雅莉,孙 枫,王元昔.基于多传感器的四旋翼飞行器硬件电路设计[J].传感器与微系统,2011,30(8):113-115.
[13] 张鹏翼,郑思仪,罗卫兵.基于专家PID的小型无人机导航算法设计[J].火力与指挥控制,2008,33(12):77-80.
[14] 王静霞.一种与ZigBee/802.15.4协议兼容的RF模块XBee/XBee Pro及其应用[J].电子工程师,2007,33(3):24-27.
Design of Autonomous Flight for UAV Based on Paparazzi Lisa/M 2.0
WANG Jun-ming,CAO Ke-cai,XIAO Bin,WANG Rong-rong
(College of Automation,Nanjing University of Posts and Telecommunications,Nanjing 210046,China)
The four rotor Unmanned Aerial Vehicle (UAV) is of characteristics such as good movement performance,small size,light weight,novel structure,and friendly environment (not easy to cause damage to the surrounding),and with great value in the military,civil and scientific research.Paparazzi is a fully open source project of software and hardware,which began in 2003,aiming to build a strong,autonomous and automatic driving system.In this paper,the Paparazzi Lisa/M 2.0 and ground control system is introduced firstly,and then on the basis of the actual production of quad rotor UAV system for analysis of problems that need to be paid attention to in the development process and key steps,and the four rotor UAV is made successfully,and a series of analysis and test are completed.Use of the navigation control of ground control system can make four rotor UAV achieve a series of tasks such as autonomous navigation,hovering and landing,detailed study of the design and simulation of path planning control.The simulation shows that the effectiveness and accuracy in Paparazzi Lisa/M 2.0 combined with ground control system for four rotor UAV route planning control,can be used for four rotor path planning of UAV command.
Unmanned Aerial Vehicles (UAV);data transmission;autonomous flight;path planning
2015-05-21
2015-08-25
时间:2016-05-05
国家创新训练计划项目(SZDG2014015);教育部归国留学人员启动基金项目(BJ213022)
王俊明(1993-),男,专业为控制理论与工程;曹科才,副教授,通讯作者,研究方向为非线性系统分析与设计、多无人机系统的协调控制。
http://www.cnki.net/kcms/detail/61.1450.TP.20160505.0814.026.html
TP302
A
1673-629X(2016)05-0197-04
10.3969/j.issn.1673-629X.2016.05.043
