基于多尺度各向异性高斯核的彩色图像边缘检测算法
2016-02-24卢健,黄杰,潘峰
卢 健,黄 杰,潘 峰
(西安工程大学 电子信息学院,陕西 西安 710048)
基于多尺度各向异性高斯核的彩色图像边缘检测算法
卢 健,黄 杰,潘 峰
(西安工程大学 电子信息学院,陕西 西安 710048)
文中提出一种新的对噪声鲁棒的彩色图像边缘检测算法。该算法利用多尺度乘积作为提取彩色图像的边缘映射的测度。首先,分别利用单尺度各向异性高斯核的方向导数计算彩色图像的边缘强度映射后再求取尺度乘积的均方值,然后通过非极大值抑制找出候选边缘像素点,最后在高低门限值的约束下去除伪边缘像素点,通过滞后判定实现边缘连接并将边缘图作为掩码与彩色图像结合形成彩色图像边缘图。与Canny算法相比,该算法通过多尺度高斯核的结合得到较好的边缘分辨率,同时引入依赖于噪声的高低门限来控制虚假边缘的发生可能性。
各向异性高斯核;多尺度;EMS;彩色图像
1 概 述
边缘是指图像局部强度变化最显著的部分,其中彩色图像的比灰度图像多10%的信息量,因此对彩色图像进行边缘检测能更好地提取出边缘轮廓。图像边缘提取是图像理解和图像处理中重要的低层次处理,主要是检测出灰度图像中灰度强度变化显著的地方。边缘轮廓的提取广泛地应用于图像分析和计算机视觉中,例如图像分割[1]、图像检索[2]和目标跟踪[3]等。因此,提出一种有效可靠的边缘检测算法是非常重要的。
边缘提取已经在计算机视觉和图像处理领域中得到有效的利用超过50年之久。大量的方法被提出用来分析图像强度的变化。这些方法可以分成两部分[4]:局部分析和全局分析。早先的算法主要是基于微分的[5-7]、统计学的[8-9]和多分辨率的[10]算法。后期主要表现为基于主动轮廓的算法[11-12]。文中主要介绍的是基于微分的边缘检测算法。
基于微分的边缘检测算法一种是通过一阶导数绝对值的极大值来寻找边缘像素点,另外一种是通过图像的二阶导数的零交叉点来寻找边缘像素点。早期的算法都遭遇到了由于噪声的影响而降低边缘的检测性能的困境,例如Prewitt算子[5]、Robert算子[13]和Sobel算子[14]都利用局部梯度算子来检测边缘。
为了解决上述所提出的问题,可以在微分之前先用低通滤波器对图像进行平滑。Marr和Hildreth[15]首先引进了高斯滤波器来检测图像边缘,并且利用拉普拉斯高斯算子(LOG)计算图像的二阶导数,从而找到零交叉点。后来,Haralick[16]认为可以把边缘定义为沿梯度方向梯度值最大的点。Lindeberg[17]提出了基于离散近似导数的最近邻算法来检测边缘。从那以后,正则化的拉普拉斯零交叉点算法被认为是最优化的边缘积分器[18],并且改进的LOG算子[19]也被相继提出,且各自分别在对边缘检测时具有较强的定位性和噪声的鲁棒性。
从图像获取的方式来看,数字图像总是会被噪声污染。在这种情况下,边缘检测被认为是最优化的滤波器设计问题。Canny[6]首先构想出把边缘检测看成一个最优化问题,得到一个在高斯白噪声条件下提取一维下的边缘轮廓。根据Canny检测器的原理,此滤波器可以由各向同性高斯核的一阶导数来替代。Canny边缘检测器主要有高斯平滑、梯度计算、非极大值抑制和高低门限选择等步骤,这个是被广泛地应用到工业标准的边缘检测算法。然而,Canny算法至少也面临着两个缺点[7,20]:一方面,小尺度的各向同性高斯核可以提取图像中强度的细节变化,但是对噪声却很敏感,然后大尺度高斯核可以获得较好的噪声鲁棒性但定位精确性降低。另一方面,边缘像素可以定义为一边梯度值小于另一边的像素梯度值,但这可能会漏检一些明显的边缘。边缘丢失多数发生在交叉边缘部分,这也严重影响了基于边缘轮廓的图像处理的一些应用,比如基于边缘轮廓的角点检测[21-22]。其中,角点被认为是边缘的交叉点或者是局部曲率的极大值点。
为了获得精确的图像灰度变化和图像结构信息,Canny[6]也提出了一种特征综合的由粗到细的边缘检测算法。在这种情况下,Bergholm[23]提出了利用各向同性高斯核分别从低分辨率到高分辨率来追踪边缘。Lindeberg[24]提出了尺度空间下的边缘检测。Mallat和Zhong对奇异点和边缘检测器利用多分辨率而使Canny的方法更广泛化[10]。Shui和Zhang[7]提出了一个对噪声鲁棒性的边缘检测器,这个检测是在Canny检测器的框架下融合各向同性和各向异性高斯核来检测边缘的。Elder等[25]提出了基于各向同性高斯核和边缘追踪的多尺度边缘检测算法。Molina等[26]介绍了基于增加高斯平滑的多尺度边缘检测算法。
这些方法比起Canny算子得到了更好的检测结果。然后,多尺度算法也面临着一些限制[27]:应该选取多少个滤波器来平滑图像和怎样确定滤波器的尺度大小。Lindeberg[28]提出一种边缘脊线的检测算法,该算法可以在粗尺度下扩散边缘和精尺度下检测阶跃边缘。Ding和Goshtasby[20]首先提出基于Canny的边缘定义问题,然后再结合梯度值局部最大值和非极大值抑制去提取边缘像素。文献[29]通过贝叶斯风险理论来分辨边缘。Mcilhagga[30]提出一个基于Canny标准上的更优化边缘检测器,称为无限对称指数滤波器[31]。尽管上述提到的滤波器都提高了Canny边缘检测器的性能,但是还有很多地方有待进一步提高。
文献[12]中提到基于各向同性高斯核的边缘检测算法只利用了水平和垂直两个方向上的方向导数,然而如果能利用更多的方向导数,那么将会提高噪声鲁棒性的能力。此外,边缘是有各向异性的属性的,它沿着不同的方向会有不同的几何结构和概率特性。文献[21]也证明各向同性高斯核不能满足上述情形,而各向异性高斯核(ANGKs)有着更好的噪声鲁棒性,能从图像中提取更精确的灰度变化信息。
文中将在高信噪比、精准定位和高的边缘分辨率这三个条件下设计多尺度乘积的各向异性方向导数(ANDD)来提取灰度变化信息。通过与Canny检测算子作比较,实验结果表明,提出的算法有着更好的边缘完整性和精确性。
2 图像边缘检测算法
2.1 各向异性高斯核函数及方向导数滤波器
扩展的二维高斯核函数[32]可表示为:
(1)
其中:σ为尺度大小;ρ为各向异性因子;U=[uv]T为直角坐标系坐标。
对式(1)中U变量求导可得到一阶微分算子:
(2)
通过逆时针旋转式(1)可得到不同方向各向异性高斯核方向导数表达式:
(3)
其中,Rθ为高斯核旋转角度为θ的旋转矩阵。
图1为各向异性高斯核方向导数滤波器在八个方向上的表现形式。这样在其中任何一个方向上各向异性高斯核函数都可以对图像进行平滑,并且各向异性高斯方向导数也可以较好地提取图像多尺度多方向的灰度变化信息。
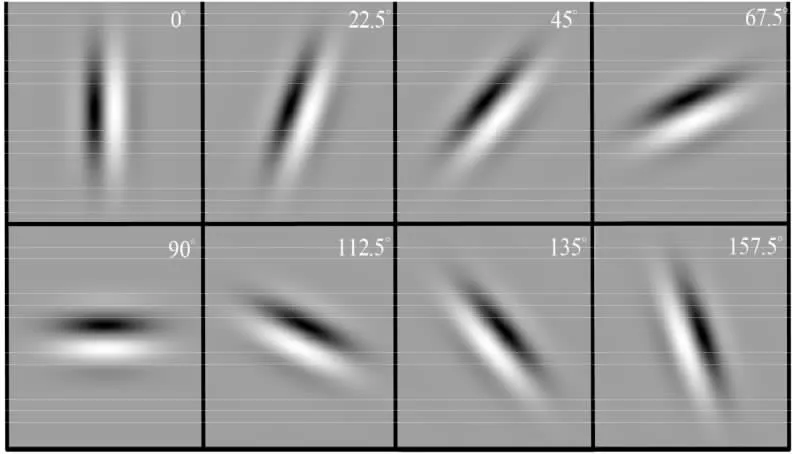
图1 八个方向各向异性高斯核方向导数滤波器
2.2 方向导数对噪声抑制及其离散化形式
噪声在图像处理过程中是不可避免的。通过图像被零均值方差为ε2的高斯白噪声w(x)污染来衡量各向异性高斯核方向导数抑制能力。噪声的各向异性方向导数响应的方差如下:

(4)
由式(4)可以看出,方向导数滤波器抑制噪声的能力只与噪声方差、尺度大小和各向异性因子有关,与旋转角度θ无关。由于实际图像都是离散的,所以对各向异性高斯核方向导数作离散采样处理,如式(5)所示:
(5)
则图像I(N)各向异性高斯核方向导数滤波器响应为:
(6)
2.3 图像的边缘映射
现定义各向异性高斯方向导数滤波器平滑图像得到的每个像素的最大幅度值构成了基于各向异性方向导数的边缘映射。尺度是唯一决定基于各向异性高斯核方向导数的边缘映射的信噪比大小的因素。因此使用大尺度来获得高信噪比,而使用小尺度与各向异性因子比值来获取高边缘分辨率,最后利用两尺度的乘积作为检测边缘轮廓的测度。
假使由式(6)中P个方向(文中选择32个方向)的各向异性高斯核方向导数滤波器对图像进行滤波,则可得到基于各向异性高斯核方向导数的边缘映射定义:
(7)
其中,I(N)表示一幅连续的图像。
这种情况下,只要各向异性高斯核方向导数中有一个各向异性方向导数滤波器能够把两个相邻边缘区分出来,就等同于基于各向异性高斯核方向导数的边缘映射能够把它们区分开。
由于噪声鲁棒性和强分辨率是基于各向异性高斯核方向导数的边缘映射重要特征,所以利用式(7)对图像平滑滤波后在P个方向中选众多方向中的最大值。当然任何检测图像进行边缘检测之前都需要进行平滑滤波的过程,虽然平滑必定会带来边缘模糊和边缘拉伸。
对于各向异性高斯核,边缘拉伸和边缘模糊现象会在一定程度上一起发生。小尺度核会产生小的边缘模糊和边缘拉伸,但抗噪性差;而大尺度则会产生严重的边缘模糊和边缘拉伸,但有非常好的噪声鲁棒性。因此,使用基于各向异性高斯核方向导数的边缘映射的边缘检测会在真实边缘的末端产生虚假的边缘像素。考虑到小尺度的边缘映射只带来一点边缘拉伸的这一优点,把基于各向异性高斯核方向导数小尺度的边缘映射ηa(x)和大尺度边缘映射ηg(x)乘积融合成一个新的边缘映射ηf(x)。融合后的边缘映射定义为:
(8)
这种融合是通过精度为像素级的几何平均来实现的。因为不同尺度的边缘映射有着相同的边缘分辨率,所以这种融合不会降低边缘分辨率。由于求的是几何平均值,所以融合后的边缘映射既继承了小尺度边缘映射的优点,较低的边缘拉伸效应,也保持着大尺度边缘映射中较高的噪声鲁棒性,并且信噪比等于两个尺度信噪比的几何平均。
2.4 算法步骤
(1)计算边缘映射:将彩色图像转换成灰度图像后,利用不同尺度下各向异性高斯核方向导数与图像进行卷积并将融合的多尺度的乘积均方值作为边缘强度映射并同时进行归一化处理。
(2)非极大值抑制:对于每一个像素,利用梯度幅值和梯度方向θ(n)来判断该像素是否是边缘映射中的极大值。所有极大值点形成的候选边缘像素集为Ω(n)。
(3)高低阈值门限和滞后判定:利用强度值超过高门限Tmax判定为强边缘像素,根据八邻域准则判定那些超过低门限而低于高门限的候选像素是否有一个通路与强边缘连接,从而构成图像的边缘图。
(4)使用上文所得的边缘图作为掩码,将边缘图拷贝到彩色图像中。
3 结果及性能分析
为了验证文中提出的算法比经典的Canny算子检测算法性能更佳,故选取经典的Lena图像在Matlab软件仿真条件下来验证文中提出的图像边缘检测算法比Canny算子的优越性。
图2为实验所用的256×256的Lena彩色图像。

图2 经典Lena图像
实验中各向异性高斯核方向导数选取的方向P=32,尺度因子σ分别取1和3,同时由于各向异性因子ρ=σ,故也均同时取值为1和3,高阈值取灰度值直方图中大于70%灰度值以上的像素,低阈值取高阈值的0.4倍,而经典的Canny算子中高低阈值取值范围为[0,0.35]。
算法对图像的检测结果如图3所示。

图3 实验检测结果
从图3(a)中可以看出,Lena图像的右边脸部轮廓没有全部检测出来,并且背景中柱子也只是检测出来一条边缘。反观图3(b)的结果图在这两方面就全部检测出来且清晰可见。在细节上,Canny算子的检测结果还有很多虚假边缘,尤其是在帽子上的虚假边缘,主要是外界噪声的影响使得检测器受到干扰,而各向异性高斯核方向导数算子就体现出了对噪声的鲁棒性,细节边缘清晰可见并且虚假边缘几乎没有。
综上所述,与经典的Canny算子检测算法相比,文中提出的算法具有更好的检测性能,尤其对噪声的鲁棒性非常突出。
4 结束语
针对图像边缘检测的定义,文中提出了一种基于多尺度的各向异性高斯核方向导数的彩色图像边缘检测算法。该算法对边缘检测具有很好的噪声稳健性,其提取彩色图像的边缘映射利用的是小尺度边缘映射与大尺度边缘映射的乘积均方融合,不仅能快速提取图像多方向的灰度变化信息,而且目标图像的细节边缘还能被很好地检测出来。大量的实验数据表明,与Canny边缘检测相比,文中提出的图像边缘检测算法在边缘细节和噪声鲁棒性上都有较大优势。对于图像的边缘分辨率与拉伸效应,文中算法在设计检测器时也优先考虑到。同时,理论分析与实验结果也都明确表明,与Canny的三大准则,即低的虚假响应、边缘定位和信噪比一样,图像的边缘分辨率在图像的特征提取中也是很重要的。
[1]RiveraAR,MurshedM,KimJ.Backgroundmodelingthroughstatisticaledge-segmentdistributions[J].IEEETransactionsonCircuitandSystemsforVideoTechnology,2013,23(8):1375-1387.
[2]ZhangSL,TianQ,LuK,etal.Edge-SIFT:discriminativebinarydescriptorforscalablepartial-duplicatemobilesearch[J].IEEETransactionsonImageProcessing,2013,22(7):2889-2902.
[3]ZhaoP,ZhuH,ShibataT.Adirectional-edge-basedrealtimeobjecttrackingsystememployingmultiplecandidate-locationgeneration[J].IEEETransactionsonCircuitandSystemsforVideoTechnology,2013,23(3):503-517.
[4]PapariG,PetkovN.Edgeandlineorientedcontourdetection:stateoftheart[J].JournalofImageandVisionComputing,2011,29:79-103.
[5]PrewittJMS.Objectenhancementandextraction[C]//Procofpictureprocessingandpsychohistories.[s.l.]:AcademicPress,1970:75-149.
[6]CannyJ.Acomputationalapproachtoedgedetection[J].IEEETransactionsonPAMI,1986,8(6):679-698.
[7]ShuiPL,ZhangWC.Noise-robustedgedetectorcombiningisotropicandanisotropicGaussiankernels[J].PatternRecognition,2012,45(2):806-820.
[8]GalvaninEAS,ValeGM,PozAD.TheCannydetectorwithedgefocusingusingananisotropicdiffusionprocess[J].PatternRecognitionandImageAnalysis,2006,16(4):614-621.
[9]YiS,LabateD,EasleyGR,etal.Ashearletapproachtoedgeanalysisanddetection[J].IEEETransactionsonImageProcessing,2009,18(5):929-941.
[10]MallatS,ZhongSF.Characterizationofsignalsfrommulti-scaleedge[J].IEEETransactionsonPatternAnalysisandMachineIntelligence,1992,24(7):710-732.
[11]MallatS,HwangML.Singularitydetectionandprocessingwithwavelets[J].IEEETransactionsonInformationTheory,1992,38(2):617-643.
[12]BaoP,ZhangL,WuXL.Cannyedgedetectionenhancementbyscalemultiplication[J].IEEETransactionsonPatternAnalysisandMachineIntelligence,2005,27(9):1485-1490.
[13]RobertsLG.Mthineperceptionofthree-dimensionsolids[C]//Procofoptimalandelectro-optimalinformationprocessing.MA:MITPress,1965:99-197.
[14]SobelIE.Cameramodelsandmachineperception[D].PaloAlto,Calif:StanfordUniversity,1970.
[15]MarrD,HildrethE.Theoryofedgedetection[C]//ProceedingoftheroyalsocietyofLondon.[s.l.]:[s.n.],1980:187-217.
[16]HaralickRM.Digitalstepedgesfromzerocrossingofseconddirectionalderivatives[J].IEEETransactionsonPatternAnalysisandMachineIntelligence,1984,6(1):58-68.
[17]LindebergT.Discretederivativeapproximationwithscale-spaceproperties:abasisforlow-levelfeatureextraction[J].JournalofMathematicalImagingandVision,1993,3(4):349-376.
[18]KimmelR,BruchsheinAM.RegularizedLaplacianzerocrossingsasoptimaledgeintegrators[J].InternationalJournalofComputerVision,2003,53(3):225-243.
[19]WangX.Laplacianoperator-basededgedetectors[J].IEEETransactionsonPatternAnalysisandMachineIntelligence,2007,29(5):886-890.
[20]DingLJ,GoshtasbyA.OntheCannyedgedetector[J].PatternRecognition,2001,34(5):721-725.
[21]ShuiPL,ZhangWC.Cornerdetectionandclassificationusinganisotropicdirectionalderivativerepresentations[J].IEEETransactionsonImageProcessing,2013,22(8):3204-3218.
[22]MehrotraR,NamuduriKR,RanganthanN.Gaborfilter-basededgedetection[J].PatternRecognition,1992,25(12):1479-1494.
[23]BergholmF.Edgefocusing[J].IEEETransactionsonPatternAnalysisandMachineIntelligence,1987,9(6):726-741.
[24]LindebergT.Detectingsalientblob-likeimagestructuresandtheirscalewithascale-spaceprimalsketch:amethodforfocus-of-attention[J].InternationalJournalofComputerVision,1993,11(3):283-318.
[25]ElderJ,ZuckerS.Localscalecontrolforedgedetectionandblurestimation[J].IEEETransactionsonPatternAnalysisandMachineIntelligence,1998,20(7):699-716.
[26]MolinaCL,BatesBD,BustinceH,etal.Multi-scaleedgedetectionbasedonGaussiansmoothingandedgetracking[J].Knowledge-basedSystems,2013,44(3):101-111.
[27]BasuM.Gaussian-basededge-detectionmethods-asurvey[J],IEEETransactionsonSystems,Man,andCybernetics-PartC:ApplicationsandReviews,2002,32(3):252-260.
[28]LindebergT.Edgedetectionandridgedetectionwithautomaticscaleselection[J].InternationalJournalofComputerVision,1998,30(2):117-154.
[29]ZhangY,RockettPI.TheBayesianoperatingpointofthecannyedgedetector[J].IEEETransactionsonImageProcessing,2006,15(11):3409-3416.
[30]McilhaggaW.TheCannyedgedetectorrevisited[J].InternationalJournalofComputerVision,2011,25(3):251-261.
[31]ShenJ,CastanS.Anoptimallinearoperatorforstepedgedetection[J].GraphicalModelsandImageProcessing,1992,54,112-133.
[32] 章为川,张 智,赵 强,等.基于各向异性高斯方向导数滤波器的角点检测[J].西安工程大学学报,2014,28(4):491-495.
Color Image Edge Detection Algorithm Based on Multi-scale Anisotropic Gaussian Filter
LU Jian,HUANG Jie,PAN Feng
(School of Electronic and Information,Xi’an Polytechnic University,Xi’an 710048,China)
A new color image edge detection algorithm of noise robustness is proposed.It uses multi-scale multiplication as measure to extract the color image map.First,single-scale anisotropic Gaussian kernel directional derivative filters are used to calculate image intensity map respectively and calculate the mean square value of multi-scale multiplication.Then through the non-maximum suppression,the candidate edge pixel is found.Finally,by the high and low threshold values and the implementation of lagging,the false edge pixels are erased to realize edges connected,combining edge figure as a mask with color image to form the color image edge.Compared with the Canny algorithm,the algorithm obtains,by the combination small and big scale of the Gaussian kernel,a better edge resolution.At the same time,high and low threshold dependable of noise is introduced to reduce the possibility of a false edge in noise background.
anisotropic Gaussian;multi-scale;EMS;color image
2015-07-13
2015-10-15
时间:2016-05-05
国家自然科学基金资助项目(61040055);陕西省科学研究计划项目(2013JK1109)
卢 健(1978-),男,副教授,博士,研究方向为AUV协同导航、目标跟踪、图像处理与模式识别。
http://www.cnki.net/kcms/detail/61.1450.TP.20160505.0817.048.html
TP391.41
A
1673-629X(2016)05-0066-05
10.3969/j.issn.1673-629X.2016.05.014
