电推进卫星角动量卸载研究
2016-02-13马雪韩冬汤亮
马雪,韩冬,汤亮
1.北京控制工程研究所,北京100190 2.空间智能控制技术重点实验室,北京100190
电推进卫星角动量卸载研究
马雪1,2,*,韩冬1,2,汤亮1,2
1.北京控制工程研究所,北京100190 2.空间智能控制技术重点实验室,北京100190
电推进卫星需要在进行位置保持的同时通过将推力器的指向略微偏离质心来产生控制力矩,完成角动量卸载。针对该问题,文章在给定推力器开机位置、时长和动量轮目标卸载量的情况下,提出了正常模式和故障模式下的角动量卸载算法。通过对推力模型的简化,得出了推力器最优偏转方向的解析解,并对考虑推力器弧段损失和不考虑弧段损失的角动量卸载算法进行了比较。仿真结果表明,所提出的卸载算法能够在进行位置保持的同时完成角动量卸载,为电推进卫星的在轨控制策略提供了有效解决方案。
电推进;角动量卸载;小推力控制;参数优化;位置保持控制
目前,国外已有波音601 HP和702平台、欧洲航天局ARTEMIS卫星、Loral公司的电推力卫星平台等诸多高轨任务,搭载电推进系统作为静止轨道卫星的主要执行机构[1]。国内已有不少学者在地球静止轨道转移和离轨[2-4]、深空探测[5-6]、重力场测量卫星[7]等诸多领域,开展了与电推进控制相关的研究。对于电推进卫星,星上角动量卸载的方式与传统的化学推进卫星存在明显区别,需要进行深入研究。
星上角动量卸载的目的是释放星上角动量交换执行机构(动量轮、控制力矩陀螺等)因环境干扰力矩而造成的角动量累积,以避免达到饱和状态。常用的卸载方式有磁力矩器卸载和推力器卸载。事实上,角动量卸载算法是大部分低轨、高轨卫星上普遍应用的控制算法,在航天上并非全新的问题。近年来,对角动量卸载的研究往往集中在具有特殊结构或执行新的任务的航天器上,例如对空间站等搭载控制力矩陀螺(CMG)的大型航天器的角动量管理[8-12],或是对深空探测器的角动量卸载研究[13]。而对于电推进卫星,其推力器配置为4台电推力器呈锥形布局,推力器较少,星上角动量卸载并非独立进行控制,需要在进行位置保持控制点火的同时,通过略微偏转推力器的角度产生多余的力矩,实现角动量的卸载。对此,国外文献中的方法是将位置保持控制的点火位置、点火时长以及电推力器偏转角度作为控制参数进行优化迭代[14-15],该方法能同时对位置保持和角动量卸载的控制量实现较为精确的求解,但需要进行反复迭代,计算量相对较大。
本文考虑到星载计算机的计算能力约束,提出了位置保持控制量和推力器偏转角度分别求解的电推进卸载算法,损失部分位置保持和卸载精度,以降低星上卸载算法的计算量。在位置保持正常和故障模式下给定推力器开机位置、时长和动量轮目标卸载量的情况下,提出考虑推力器弧段损失和不考虑弧段损失的两种角动量卸载简化算法,并利用数值仿真对两种算法进行对比、验证。结果表明,本文提出的卸载算法能够在进行位置保持的同时完成角动量卸载,计算量大幅下降。
1 基于电推进的角动量卸载
1.1 电推进卫星位置保持点火策略
电推进卫星通常仅安装4台电推力器,呈锥形布局,如图1所示。在卫星本体系下,4台推力器成对对称斜安装在背地板四边,在北侧的2台推力器为NW和NE,南侧的2台推力器为SW和SE。4台推力器的安装角度定义如图2所示,α为安装在西北向(NW)的推力器的推力方向矢量在卫星本体系x-z面投影与z轴夹角,θ为安装在西北向(NW)的推力器的推力方向矢量在卫星本体系y-z面投影与y轴夹角,其他3台推力器的定义与推力器NW对称。

图1 电推进卫星推力器布局Fig.1 Mounting position of electric thruster
图2 电推力器安装角度Fig.2 Definition of gimbal angle of electric thruster
受到推力器的配置约束,电推进卫星的角动量卸载与位置保持控制之间存在耦合。电推力器在进行位置保持控制时根据卸载的方向和大小对推力方向进行略微偏转,通过产生额外的力矩实现角动量的卸载。由此可见,电推进卫星每轨进行角动量卸载的时刻和时长与位置保持控制紧密相关。为此,本节将对电推进卫星的位置保持点火方式进行粗略介绍。
电推进卫星的位置保持以数周为一个控制周期周而复始进行。每个控制周期的前几日由地面进行测定轨并制定位置保持策略,在此期间卫星不进行位保和卸载控制,而在剩余的时间内卫星每轨都进行数次的位置保持点火控制,并在此基础上进行角动量卸载。电推进位置保持的点火策略有两种形式,分别为正常模式下的位置保持策略和故障模式下的位置保持策略。正常模式即为4台电推力器均能开机工作的模式,采取一轨分为相隔180°的2个开机时段(通常在升、降交点附近),每个时段各有2台推力器相继开机,利用4台推力器控制量的排列组合实现倾角、偏心率和平经度控制,如图3所示;故障模式下,一台推力器发生故障,此时,仅利用未发生故障的2台对角线上的推力器进行控制,南、北的2台推力器除了在降、升交点附近开机外,在一个轨道周期内的第3台位置两台对角线推力器相继开机,实现位置保持控制,如图4所示。

图3 正常模式位置保持示意Fig.3 Station-keeping control of Nominal mode

图4 故障模式位置保持示意Fig.4 Station-keeping control of failure mode
1.2 角动量卸载算法
当考虑位置保持控制和角动量卸载,对推力器点火时长、位置和推力器卸载偏转角度同时求解需要进行迭代优化,计算量较大,不利于星上求解。为此,考虑到用于卸载的偏转角度不大,对位置保持控制的影响有限,本文采取将位置保持点火时长、位置和推力器偏转角度分开计算的方式,先求出位置保持点火位置、时长参数,再由已知的位保参数求得角动量卸载所需的推力器偏转最优角度的解析解,降低计算量。在推力器卸载能力足够大时,不因卸载需要改变电推力器点火时长、位置。
受到电推进卫星锥形推力器布局的影响,至少需要通过任意两台对角线上推力器执行卸载任务,才能对所有方向上的角动量实现较好的覆盖。为减少推力器的转动次数,提高驱动机构寿命,在一个轨道周期内,采用两个对角线上推力器仅分别在一个点火位置偏移推力方向的策略,并选取推力器方向转动方差最小的对角线推力器对进行卸载。
(1)考虑弧段损失的正常模式角动量卸载
在正常模式位置保持点火策略下,以SW和NE为例,推导角动量卸载时推力器调节角度的计算步骤。NW和SE组合的推导过程与SW和NE一致。
南、北侧推力器轨道系到惯性系坐标转换矩阵为

式中:κ为由南北位置保持倾角控制产生的点火位置偏移,与季节和年份相关。
设推力器在本体系上的安装位置为

假设推力方向改变量在x-y平面上移动,大小为dxSW、dySW、dxNE、dyNE。为对卸载的优化问题进行简化,假设该量为小量,不改变矢量本身大小(当推力方向改变量较小时,此简化带来的误差很小)。推力大小为
式中:F为推力大小;r为推力器距质心距离。
考虑到电推力器点火时长较长,将点火时间看成是静止轨道卫星在轨道上运行的一个弧段,可为角动量卸载提供的动量矩公式为式中:tSW、tNE为由位置保持控制算出的单个推力器喷气时长。
易知,角动量卸载即为求使得偏转角方差最小的求极值问题,该问题的目标函数约束条件为


式中:Mx、My、Mz为在惯性系三个方向上的目标卸载量。
由拉格朗日乘子法,即可对该问题进行求解。设哈密顿函数极值为以下方程组的解:


此时,待求解方程为线性方程组

依照同样的方法,可求得另一对角线元素NW和SE的偏移量dxNW、dyNW、dxSE和dySE,并根据式(5)选择偏转角方差最小的一组对角线元素进行卸载。
(2)不考虑弧段损失的角动量卸载
利用上一节中的算法,虽然可求得正常模式下的角动量卸载偏转方向,但求解过程中需要对两个7阶方阵求逆,计算量较大。因此,本节对角动量卸载算法进行简化,进一步减小卸载算法的计算量。
不考虑弧段损失,将电推力器的点火位置看成是轨道上的一点。此时,角动量卸载提供的动量矩公式由式(4)变为

再根据式(8),可直接求出对角线上推力器的卸载偏移量:
用同样的方法,可求得另一对角线元素NW和SE的偏移量dxNW、dyNW、dxSE和dySE,在选择偏转角方差最小的一组对角线元素进行卸载。该方法由于不考虑弧段损失,会使卸载精度降低,但计算量大为缩小。
(3)故障模式角动量卸载
故障模式下,推力器在轨道上的三个位置点火。
三个位置上轨道系到惯性系的坐标转换矩阵为

式中:η为故障模式下中间一次变轨所在的赤经,如图4所示。
故障模式的角动量卸载只能依靠单一对角线上的某对推力器进行卸载,但根据选择卸载点火段不同,有4种不同的排列组合:

其中,第4种组合M22能够产生的角动量较小,可只考虑前3种组合,选择偏转角方差最小的一种组合进行卸载。
2 仿真结果
2.1 算法比较
利用上述两种卸载算法对正常模式下位置保持时的角动量卸载进行仿真,选择调节角度平方和较小的一对推力器完成角动量卸载,控制段每日的目标卸载量为5 N·m·s/d,方向为随机量,分别利用考虑弧段损失和不考虑弧段损失的角动量卸载算法进行仿真验证,仿真时间为1年,以14天为一个控制周期,14天内的前2天不进行控制,后12天进行位置保持和角动量卸载。
由于两种算法的推力器调节角度量级相同,角度相近,仅给出不考虑弧段损失的卸载算法推力器调节角度。如图5所示,当每日的目标卸载量为5 N·m·s/d时,推力器调节角度在5°以内。
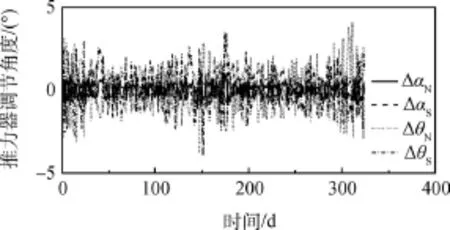
图5 推力器调节角度曲线Fig.5 Gimbal angles of the thrusters
图6、图7分别为真实卸载量与目标卸载量偏差,以及真实卸载方向与目标卸载方向夹角。图中实线为考虑弧段损失的算法偏差,虚线为不考虑弧段损失的算法偏差。如图所示,当考虑弧段损失时,真实卸载量与目标卸载量之间的偏差在5%以内,角动量卸载方向的偏差在8°以内,具有较高的经度。当忽略弧段损失时,卸载量的偏差最大可达30%,卸载方向与目标卸载方向的夹角在15°以内,虽然在不考虑弧段损失时的情况下,卸载的精度下降,但算法依旧能够卸载掉大部分动量轮累积的角动量。

图6 真实卸载量与目标卸载量偏差Fig.6 Deviation of moment dumpling

图7 真实卸载方向与目标卸载方向夹角Fig.7 Orientation deviation of moment dumpling
2.2 对位置保持的影响
本文为避免进行大计算量的优化计算,采用的是位置保持和角动量卸载分开计算的方式以求得解析解,当电推进卫星进行角动量卸载时,会将推力器方向略微偏转,这无疑会对位置保持控制的精度产生影响。为此,本文对角动量卸载对位置保持控制的影响进行仿真验证。对角动量卸载下的位置保持控制进行仿真,设置定点经度为东经120°,仿真时间为1年,其他仿真参数与2.1节相同。
图8、图9和图10分别为考虑角动量卸载的轨道倾角、偏心率和平经度曲线,可见在叠加上卸载所需的推力器偏转后,卫星依旧在高轨卫星位置保持控制的容许范围之内,能够在完成角动量卸载的同时实现位置保持控制。
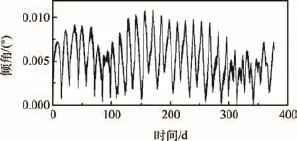
图8 轨道倾角曲线Fig.8 Orbital inclination
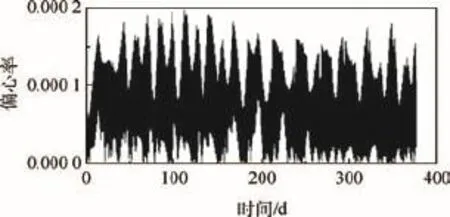
图9 偏心率曲线Fig.9 Orbital eccentricity

图10 平经度曲线Fig.10 Mean longitude
图11、图12、图13分别为考虑角动量卸载和单纯进行位置保持控制之间的控制偏差。如图所示,角动量卸载对于南北位保的影响很小,对于东西位保的影响稍大,但也在合理的范围内,且由于东西位保采用了反馈控制,本控制周期对位置保持产生的影响不会累加到下一个控制周期。

图11 倾角控制偏差Fig.11 Control error of orbital inclination

图12 偏心率控制偏差Fig.12 Control error of orbital eccentricity

图13 平经度控制偏差Fig.13 Control error of mean longitude
3 结束语
本文提出的电推进角动量卸载方法,可用于电推进卫星进行位置保持,同时,通过偏转电推力器的指向实现角动量执行机构(动量轮等)的角动量卸载。在给定推力器开机位置、时长和动量轮目标卸载量的前提下,推导了考虑推力器弧段损失和不考虑弧段损失的角动量卸载简化算法,并进行了数学仿真。结果表明,考虑弧段损失的卸载精度要优于不考虑弧段损失的卸载算法,但在求解过程中需要对高维矩阵求逆,计算量明显加大。因此,应根据星上实际计算能力选择是否考虑弧段损失进行卸载。本文给出的角动量卸载算法能够快速计算出卸载所需的电推力器喷气方向,并对位置保持的控制精度影响较小,取得了较好的效果。在未来的工作中,可专门针对电推进卫星受太阳光压力矩影响较大的特点,对电推进角动量卸载策略做进一步的研究。
References)
[1] 吴汉基,蒋远大,张志远.电推进技术的应用与发展趋势[J].推进技术,2003,24(5):385-392. WU H J,JIANG Y D,ZHANG Z Y.Application and development trend of electric propulsion technology[J]. Journal of Propulsion Technology,2003,24(5):385-392 (in Chinese).
[2] 马雪,韩冬,汤亮.电推进静止轨道转移与空间环境分析[J].空间控制技术与应用,2015,41(1):31-35. MA X,HAN D,TANG L.On the electricpropulsion-based geostationary transfer and space environmental analysis[J].Aerospace Control and Application,2015,41(1):31-35(in Chinese).
[3] 田百义,黄美丽,冯昊,等.GEO卫星电推进与化学推进组合变轨方案研究[J].航天器工程,2015,24(3): 28-33. TIAN B Y,HUANG M L,FENG H,et al.Orbit transfer concept for GEO satellite by combination of electric and chemical propulsion[J].Spacecraft Engineering, 2015,24(3):28-33(in Chinese).
[4] 王志刚,陈士橹,袁建平.电推进在静止轨道空间碎片减缓中的应用[J].飞行力学,2004,22(2):37-40. WANG Z G,CHEN S L,YUAN J P.On the application of electric propulsion in geostationary space debris mitigation[J].Flight Dynamics,2004,22(2): 37-40(in Chinese).
[5] 毛根旺,付西鹏,陈茂林.月球探测器电推进系统的应用研究[J].机械科学与技术,2008,27(7):853-856. MAO G W,FU X P,CHEN M L.Application of an electric propulsion system to a lunar detector[J]. Mechanical Science and Technology for Aerospace Engineering,2008,27(7):853-856(in Chinese).
[6] 杨福全,赵以德,李娟,等.主带小行星采样返回任务中的离子电推进应用方案[J].深空探测学报,2015,2(2): 168-173. YANG F Q,ZHAO Y D,LI J,et al.Application of an electric propulsion system to a lunar detector[J]. Journal of Deep Space Exploration,2015,2(2):168-173 (in Chinese).
[7] 顾左,达道安,胡长青,等.重力场测量卫星应用电推进技术[J].火箭推进,2005,31(2):23-26. GU Z,DA D A,HU C Q,et al.Application of electric propulsion technology to gravity field measurement satellites[J].Journal of Rocket Propulsion,2005,2(2): 23-26(in Chinese).
[8] 刘辉,伍斯宾斯基.利用喷气装置卸载航天器积累角动量的最小工质损耗控制[J].航天控制,2004,22(5): 32-35. LIU H,USPENSKY V B.Minimize propellant consumption during gyro system unloading process of spacecraft[J].Aerospace Control,2004,22(5):32-35 (in Chinese).
[9] 张军,马艳红,何英姿.空间站组合体惯性系内角动量管理控制[J].空间控制技术与应用,2010,36(6):1-5. ZHANG J,MA Y H,HE Y Z.Momentum management control of space station complex in inertial reference[J].Aerospace Control and Application,2010, 36(6):1-5(in Chinese).
[10] 张志方,董文强,张锦江,等.控制力矩陀螺在天宫一号目标飞行器姿态控制上的应用[J].空间控制技术与应用,2011,37(6):52-59. ZHANG Z F,DONG W Q,ZHANG J J,et al.The application of control moment gyro in attitude control of Tiangong-1 spacecraft[J].Aerospace Control and Application,2011,37(6):52-59(in Chinese).
[11] 崔培玲,张颖.采用DGCMG的敏捷卫星姿态/角动量联合控制[J].电光与控制,2013,20(1):49-55. CUI P L,ZHANG Y.Attitude and momentum control of agile satellite using DGCMG[J].Electronics Optics &Control,2013,20(1):49-55(in Chinese).
[12] 朱孟萍,徐世杰,陈新龙,等.基于参数辨识的大型航天器自适应角动量管理[J].空间控制技术与应用, 2014,40(3):47-52. ZHU M P,XU S J,CHEN X L,et al.Adaptive momentum management of large spacecraft based on parameter ientification[J].Aerospace Control and Application,2014,40(3):47-52(in Chinese).
[13] 戴居峰,徐红兵,崔雁,等.“嫦娥二号"卫星L2点角动量管理[J].中国空间科学技术,2013,4(2):72-77. DAI J F,XU H B,CUI Y,et al.Momentum management of Chang’e-2 satellite on L2 point[J]. Chinese Space Science and Technology,2013,4(2): 72-77(in Chinese).
[14] ANZEL B.Method and apparatus for a satellite station keeping:US 5443231[P].1993-11-17.
[15] ANZEL B.Stationkeeping the Hughes Hs 702 satellite with a Xenon ion propulsion system[C]∥49th International Astronautical Congress.Melbourne, Australia,1998.
(编辑:高珍)
Study on moment dumpling of electric propulsion satellite
MA Xue1,2,*,HAN Dong1,2,TANG Liang1,2
1.Beijing Institute of Control Engineering,Beijing 100190,China 2.Science and Technology on Space Intelligent Control Laboratory,Beijing 100190,China
Moment dumpling of electric propulsion satellite can be established by pointing the thrust vectors slightly away from the center of mass.On the basis of this method,electric propulsion moment dumpling for both normal mode and failure mode was investigated.The analytic solution of optimal dumpling directions was given,and the question that whether the control arc should be considered was discussed.The simulation results show that proposed method can effectively perform the moment dumpling by electric thrusters.
electric propulsion;moment dumpling;low-thrust control;parameter optimization; station-keeping control
V43
:A
10.3780/j.issn.1000-758X.2016.0013
2015-11-12;
:2015-12-23;录用日期:2016-01-18;< class="emphasis_bold">网络出版时间
时间:2016-02-24 13:38:20
http:∥www.cnki.net/kcms/detail/11.1859.V.20160224.1338.009.html
国家自然科学基金(11502017)
*
:马雪(1984-),女,博士,工程师,xuema.m45@gmail.com,主要研究方向为航天器动力学与控制
马雪,韩冬,汤亮.电推进卫星角动量卸载研究[J].中国空间科学技术,2016,36(1):70-76.MA X,HAN D,
TANG L.Study on moment dumpling of electric propulsion satellite[J].Chinese Space Science and Technology,2016,36(1):70-76(in Chinese).
http:∥zgkj.cast.cn
