农机具水平自动控制器在整地作业中的应用
2016-02-08李鉴方楼江平李革吴金富
李鉴方 楼江平 李革 吴金富
农机具水平自动控制器在整地作业中的应用
李鉴方1楼江平2李革3吴金富4

整地是农业生产中一项非常重要的作业环节。对整地机械的农业技术要求是深度符合农艺要求,而且均匀一致,整地后土壤既要有一定的松软度,又要有适宜的紧密度,水田整地还要起浆、打糊好,地表成形应符合种植要求。
由于国内拖拉机悬挂机组目前没有水平自动控制系统,平整的土地高低不平,影响播种的出苗一致性和移栽秧苗栽插的深度一致性,严重影响了机械化种植的效率、质量。
为解决这一难题,提高机械化整地作业技术水平,自2013年以来,浙江理工大学、杭州精工液压机电制造有限公司、萧山区农机监督管理总站、杭州金牛农机服务专业合作社等单位联合研制了农机具水平自动控制器,并在萧山区等地进行了试验与应用,取得了较好的成效。
1 研发与应用概况
2013年,针对我国水田耕整机械存在整地不平整,不能适应宽幅插秧机和直播机作业的情况,浙江理工大学等单位组成了课题组,初步开发了农机具水平自动控制器,并在水田平整中进行了作业试验,但由于作业环境复杂、恶劣,试验效果不是很好。2014年,课题组对研发的控制器进行了可靠性研究和性能的提高,主要是改善了控制器适应高温条件运行的性能和液压系统的稳定性,进行控制程序的优化设计。2015年对传感器组合、选配与控制系统又进一步进行了完善,并安装在杭州金牛农机服务专业合作社的2台拖拉机上,完成了60多hm2水田的整地作业。
到2015年底,已经申报国家发明专利5项,授权实用新型专利3项,获计算机软件著作登记2项。2015年11月15日,浙江省农机学会组织专家对该项目进行了科技成果鉴定,鉴定委员会认为课题组研发的系统创新性强,总体技术处国内领先水平。
2016年,农机具水平自动控制器共在10多台久保田、洋马系列拖拉机上进行了安装与使用,其中萧山区安装了7台,2016年完成作业面积400多hm2。
2 工作原理与关键技术
目前,拖拉机悬挂系统基本上是采用三点悬挂机构,该装置利用液压缸驱动左右提升臂绕机架转动,带动左右提升杆拉动下拉杆,实现提升农具的目的。当悬挂机构处于某一高度时,悬挂的农具相对拖拉机的位置是不能移动的。拖拉机在不平整的地表工作时,机体会发生左右倾斜,带动农具在横向左右摆动,使得农具不能保持水平状态。如果要调整拖拉机挂接农具的水平,必须在拖拉机停止工作的情况下手动调整提升杆的长度。在实际使用中,拖拉机的姿态时刻在变化,若想使挂接农具时刻保持水平,采取手动调整的方法是不可取的,必须通过农机具水平自动控制器进行实时调整。
农机具水平自动控制器的目的是要通过液压缸活塞杆的伸缩来使农机具始终处于水平,活塞杆的伸长缩短可以通过换向阀控制油路中液流的方向、流量来实现。基本原理是控制器通过对角度传感器采集到拖拉机的角度数据与油缸位置传感器采集到的液压缸活塞杆的位移数据的分析得出农机具角度值,然后将其与设定值进行比较运算得出控制参数如液流方向和流量大小,然后驱动比例电磁换向阀执行相应的动作。控制器采用基于CIP-51内核的C8051F020芯片,运用闭环控制方法使农机具工作时能够自动地进行平衡控制。闭环控制使得控制器能够每时每刻采集传感器传输的旋耕机的姿态数据,并不断地进行调整,因此提高了系统的控制精度,减少工作人员的劳动强度,减少重复作业时间,提高劳动生产效率。
3 操作使用
3.1 控制面板
控制面板示意图如图1所示。
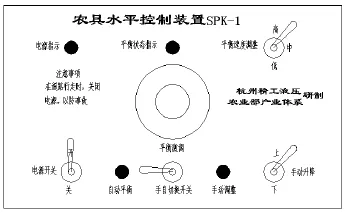
图1 控制面板
通过图1所示的控制面板可以对本水平控制装置进行工作状态的调整。控制面板中的操作开关包括电源开关、手自切换开关、平衡速度调整开关、手动升降开关和微调旋钮。
3.2 控制器操作指南
(1)开机。开机时,打开“电源开关”(开关向上拨为开,向下拨为关),电源指示灯亮,系统通电开始工作。
(2)工作前准备。开机前,首先观察拖拉机悬挂机组的农具是否处于水平状态,如果处于水平状态,可以进行机组的作业;如果不处于水平状态,调整“平衡微调”旋钮,使得农具处于水平状态,机组才能进行作业。“平衡微调”旋钮左旋时,农具的右侧下降;“平衡微调”旋钮右旋时,农具的右侧抬起。平衡微调时,将一般的水平尺放置在悬挂农具的平整位置,旋转“微调旋钮”,直到水平尺显示悬挂农具处于水平位置时为止。
3.3 手动与自动调平操作
(1)自动平衡操作。将“手自切换”开关向左拨,自动平衡指示灯亮。此时,系统进入水平自动调整阶段。当悬挂机组作业时,拖拉机悬挂的农具将始终处于水平状态。
(2)手动调整操作。将“手自切换”开关向右拨,手动调整指示灯亮。此时,可以通过“手动升降”开关调整悬挂农具的横向倾斜状态,以便适应农具的倾斜状态作业。当“手动升降”开关向上拨时,悬挂农具右侧抬起;当“手动升降”开关向下拨时,悬挂农具右侧下降;当“手动升降”开关处于中间位置时,悬挂农具将停止上下运动。
3.4 平衡速度调整
当拖拉机悬挂机组在田间作业时,如果悬挂农具的平衡调整动作过于频繁或过于迟钝时,就要进行平衡速度调整。平衡速度调整有三个挡位,即高、中、低。
4 应用效果分析
2016年10月12日,萧山区农机监督管理总站召集在萧山区使用农机具水平自动控制器的农机合作社负责人及技术人员开座谈会,共10余人参加,专题对控制器应用效果进行了探讨,综合意见为:
(1)先进性方面,农机具水平自动控制器融合国外现有农用拖拉机液电悬挂系统设计应用技术,具有多项国家专利,技术处国内领先水平。
(2)适用性方面,目前仅适用于久保田与洋马系列,其他品牌的拖拉机还在进一步试验之中。同时,在实际的作业应用中,耕地能有效保持犁底层水平一致,整地水平角度控制误差≤0.5°,可减少作业次数、减少燃油消耗、降低作业成本、提高作业质量,对平整度要求较高的如水田耕地与整地作业等效果尤为明显。
(3)可靠性方面,萧山区共推广应用7台,在2016年试验应用中,除1台液压系统出现故障,进行了维修,其余应用正常。
(4)安全性方面,在使用中未出现安全问题。
(5)经济性方面,农机具水平自动控制器目前售价为每台1.4万元,将列入浙江省省级农机购置补贴产品,自己承担预计在1万元左右,基本可以接受。
(6)建议方面,农机具水平自动控制器目前仅适用于久保田与洋马系列,范围要进一步拓展。可靠性方面要继续试验、重视,确保产品适合农业机械工作环境差、季节性强等特点。
5 结论
农机具水平自动控制器是由浙江理工大学等单位研发的新产品,可广泛应用于水田和旱地的耕整作业,作业安全可靠,可显著提高农田耕整地作业的质量,有利于秸秆还田和节水灌溉,对于提升水稻机械化种植质量与实现蔬菜机械化种植、收获的突破有积极的意义。但是,产品刚定型生产,在实际的推广与应用中,还会遇到一些技术、质量、服务上的问题,为此,需要科研单位、厂家、农户和各级农机部门共同努力,使产品得到不断的改进、完善与推广,使浙江乃至全国耕整地作业的技术水平有质的提高。
作者信息:1研究员,2高级工程师:萧山区农机监督管理总站,311201,浙江杭州;3教授,浙江理工大学,310012,浙江杭州;4总经理,杭州精工液压机电制造有限公司,310018,浙江杭州
