基于CBTC的移动授权的设计与实现
2016-02-07余光亮曾详松汪丽华
◆余光亮 曾详松 汪丽华
(重庆市公安局巴南区分局科技信息化科 重庆 401320)
基于CBTC的移动授权的设计与实现
◆余光亮 曾详松 汪丽华
(重庆市公安局巴南区分局科技信息化科 重庆 401320)
本文首先对基于通信的列车控制(Communication Based Train Control,CBTC)系统的结构进行描述,然后对基于CBTC的移动授权(Movement Authority,MA)做了介绍,最后对移动授权数据结构的设计及实现算法做了详细介绍。
CBTC;MA;车载控制器
0 引言
随着无线通信技术的飞速发展,无线通信的可靠性、可用性大大提高,基于CBTC系统应运而生,已成为了列车控制系统技术发展的重要趋势。CBTC系统的出现,无论从性能方面还是从功能方面都相对于传统的列车运行控制系统(基于轨道电路的列车控制)系统有了巨大的提升与改进。
本文主要介绍的基于CBTC的ATS系统里所特有的列车运行的移动授权,主要从移动授权基于有向图的设计描述,并且对移动授权的数据结构及算法实现做详细的阐述。
1 CBTC系统结构与功能描述
CBTC系统结构如图1所示,主要组成部分有:ATS(列车自动监控),WRS(轨旁无线单元),CDU(驾驶室显示单元),DSU(数据库存储单元),VOBC(车载控制器),ZC(区域控制器),TOD(司机操作显示单元),SA(车站适配器),AP(接入点)。

图1 CBTC系统结构
列车上的车载控制器VOBC和轨道旁的区域控制器ZC是系统安全型部件,他们通过非安全的数据通信系统(DCS)互联,但端到端的连接是安全型的。这是因为安全型设备在他们生成的每一条报文中都包含序列号和循环冗余码校验(CRC),然后对该报文进行鉴定。这个对序列号和CRC的鉴定算法只有安全型设备才能识别,因为可以防止DCS系统中非安全型设备的干扰。
VOBC通过校验轨道上的应答器,并使用收到的数据从数据库检索信息来建立列车的位置。VOBC测量应答器之间的距离,并根据速度传感器输入信号计算自探测到的一个应答器以后,列车所行驶的距离。数据库包括了所有相关的线路信息,包括车站停车,坡度,土建限速,道岔的位置和信号机的位置。
无线网络通过开放的系统IP标准从而要求实现DCS内节点的信息传送。
轨旁的区域控制器(ZC)包括MAU和PMI。MAU是其控制区域内所有列车发送位置信息的接收者,PMI是轨道设备如ACB、信号机和道岔等用于列车控制的障碍物状态信息接收者。
ZC负责控制道岔和信号机,检测其控制区域内所有列车的移动授权区域,这些功能基于如下信息:所有的列车、已分配进路和所有的障碍物(以外占用、受干扰道岔、关闭的道岔等)。ZC也负责响应临近区域ZC的授权请求。
ATS是一个非安全子系统,它为ATS值班员提供人机接口。ATS在线路显示屏上显示具体的列车位置,同时也提供接口软件执行各种功能,如临时限速、车站调停、关闭区域等。ATS负责精确的排列列车进路,CBTC系统如果检测到道岔设置和本列车进路不符。就会组织列车通过道岔。
2 移动授权的概述
CBTC系统的主要任务是保证列车在系统控制的线路范围内安全运行。这是为每辆处于通信状态的列车提供一个移动授权权限(Limit Movement Authority,LMA)来实现完成。LMA值是由ZC的MAU使用列车当前位置、行驶方向、线路以及周围线路的当前状态来决定的。ZC通过通信子系统向VOBC传达列车的LMA。VOBC负责列车在自己的LMA范围内运行。当列车在受控线路区域内按照正常时刻表移动时,VOBC将列车的位置与方向发送给ZC,并且列车的LMA将由ZC发送给VOBC。ZC也向VOBC发送列车LMA内的道岔和信号机状态,从而使VOBC能够根据这些状态监控列车。LMA的概述可以用图2表示。

图2 LMA的概述
VOBC会通过给定LMA确定一个安全余量和制动距离。受监督的停车位置与障碍物之间有一段安全距离。列车能够安全的移动到受监督的停车位置。利用线路属性(最大限速、坡度、信号机的位置),障碍物属性(非通信列车的外悬量、倒溜容量),车辆属性(最不利情况下的制动、特定区域的常用制动级别、保证紧急制动)及当前的车辆的状态(位置、方向、速度和长度),VOBC可以监督列车运行的安全距离(例如:受监督的运行区域)。VOBC将计算最坏情况下的制动距离并与LMA相比较,如果最坏情况下的制动距离超出了LMA,VOBC就会命令制动。
2.1 移动授权障碍物
列车的LMA通过一个称为线路区域分配的程序,按照规定的周期性计划重建。次建立将基于相邻线路资源的可用性,此可用性反映了线路的当前状态。
LMA构建是从列车当前占用区段开始,顺着请求进路列车行驶方向延伸至最近的障碍物、进路终端(进路目的地)或一段确定的距离(在系统参数数据库这将是一个可配置的参数)。ZC每1秒钟为列车计算一次LMA。如果ZC在已经分配的LMA中检测到新的障碍物,那么ZC将回撤LMA并将缩短的LMA报告给VOBC。如果最坏情况下的停车距离超出了新的LMA,VOBC将世家EB(紧急制动)。
(1)非通信列车占用线路
任何不能与ZC通信的列车和车辆在控制区域内占用线路区域必须以人工进路预留、区域关闭或非通信障碍区域进行防护。
(2)通信列车
一列车的任何LMA对另一列车的LMA都是障碍物。
(3)关闭的轨道区域
关闭的线路区域可以是任何线路上预先定义的区域。任何关闭区域都是一列特定列车的一个障碍物,知道列车的尾部(加上位置不确定性)出清关闭区域。
(4)未锁闭或受绕的道岔位置
如果道岔报告它是未锁闭或受绕,ZC将不会提供越过道岔区的LMA。
线路数据库将把任何线路尽头定义为永久障碍物。ZC将向VOBC发送到达线路尽头的LMA,并指示障碍物的类型。
(5)故障区域
对从其它ZC区域行驶向故障ZC的列车来说,故障ZC是其LMA的障碍物。
2.2 与移动授权相关的停车点
LMA的尽头是一个需要VOBC保护和强制服从的停车点。
在从ZC获得的LMA内,VOBC定义了非安全的停车点,例如车站停车位置。但是,与每个LMA的尽头相关的停车点是一个安全停车点;并且如果超过了这点的允许容许。VOBC将会命令紧急制动,同时,速度也被安全的监督,并且如果检测到超速情形已经超出了超速容限,VOBC将命令紧急停车。
停车点包括:
(1)如果LMA不允许列车完全在站台停车,则站台入口边界为停车点。
(2)当某个倒车的位置和列车进路不一直,这个时候和该道岔相关联的信号机为停车点。
(3)当列车向车站运动,则车站停车点(或运动停车点)为停车点。
(4)如果LAM不能使列车完全出清车站,则站台的下游边界为停车点。
(5)如果道岔防护机与站台边界之间的距离不够列车出清,并且道岔位置没有在列车进路所需的相关位置,则站台的下游边界为停车点。
2.3 LMA终止
如果VOBC丢失了与ZC的通信超过60S,则分配的ZC和VOBC的LMA将会被终止。VOBC将会把它的LMA限制在最近的障碍物(例如:站台、道岔区域)。LMA终止时,系统为LMA的延伸建立了一个非通信障碍物。
3 移动授权的设计与实现
3.1 移动授权的数据结构
基于CBTC的站场图里移动授权的显示是基于有向图的显示(即基于边与偏移量的有序对的显示),通过有向图边、偏移量(Edge,Offset)有序对(如图3所示)来反映。
3.1.1 移动授权的线路拓扑有向图结构
线路拓扑有向图表示为一组节点和边线。所有线路分叉、汇合、走行方向变更的地方及线路的终点均为节点;连接两个节点的线路则为边线。每条边线的默认运行方向为从起始节点到终点节点。每个节点和边线在系统中是唯一的。拓扑图描述了线路的连接方式和方向。
有向图表示为一组节点和边线。所有线路分叉、汇合、走行方向变更的地方及线路的终点均为节点,连接两个节点的线路则为边。每条边的默认运行方向为从起始节点到终点节点。每个节点和边线在系统中是唯一的。拓扑图描述了线路的连接方式和方向。
列车的移动授权是动态变化的,在战场图上显示时有可能只占用有向图的一条边,也有可能占用其中的几条边,但是无论怎样变,都可以通过有向图的节点、边和偏移量来表示。图中的边e7是连接节点n6到n5。节点n5连接边e7,e8 和e11。

图3 有向图的拓扑结构
3.1.2 移动授权的数据结构的设计
根据移动授权是基于边和偏移量的有序对的显示,设计移动授权的数据结果如图4:
对于城市的规划和建设来说,居住区是一个重要的组成部分,他是城市居民生活的地方,是人们基本生存生理需要的地方。在住宅小区园林景观设计的过程中,主要是生态绿化、生活品质等方面的综合应用,除此之外,在推动住宅小区生态景观设计的基础上,如何创造符合各个年龄段居民需求的运动、活动空间,提高居住环境的舒适度与幸福感都是需要景观设计过程中关注的问题。通过规划设计来增强居民的归属感和舒适度,并在和谐的环境中相互交流,增强邻里之间的沟通。

图4 移动授权数据结构
(1)起点所在的边,即移动授权所属于的边的编号。
(2)起点的偏移量,即移动授权起点所在边的起点到移动授权的起点的距离。
(3)终点所在边,即移动授权终点所在边的编号。
(4)终点的偏移量,即移动授权终点所在边起点到移动授权的终点的距离。
(5)占用边的总数,即移动授权占用多少条边。
(6)第一条边编号、第二条边编号、第三条边编号、第四条边编号,这几个值是否有效取决于占用边的总数。
有向图的移动授权的示意图如图5。本设计里有向图的方向分为正向(从左到右)及反向(从右到左)分别用0、1表示。本例图里有向图的方向是正向;移动授权占用三条边,分别是E1、E2、E5,起点M的偏移量用AM之间的距离表示,终点N的偏移量用EN之间的距离表示,占用的第一条边编号是E1,第二条边的编号是E2,第三条边的编号是E5。
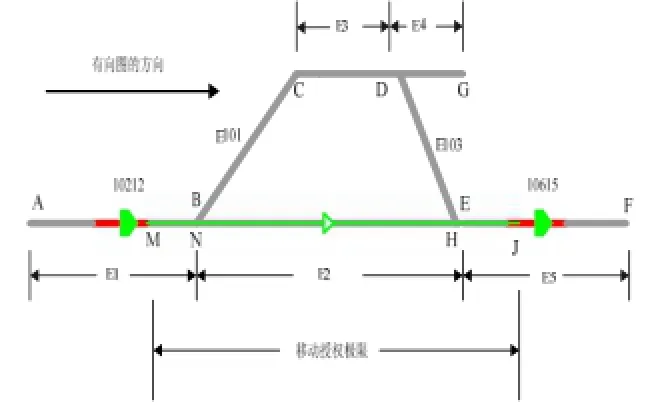
图5 移动授权示意图
3.2.1 移动授权实现的详细算法示例
移动授权用一条有方向的绿色线段表示。每一列列车的移动授权显示的算法都是一致的,下面以一列列车为例来说明。读取的数据结构来自区域控制器的数据,移动授权所占边的总数决定了移动授权的显示,本设计里设定最多占用四条边。由于把每一种实现方法都叙述完整需要占用很多的篇幅,并且每一种实现的原理基本相同,所以我在这里以移动授权占用三条边为例说明算法的实现过程。结合图5移动授权的图示进行说明。
(1) 读取来自区域控制区的数据,并按照预定的结构把各个属性数据存储起来。
(2)记录下三条边的每一条边的编号分别是E1、E2、E3。
(3)求出移动授权的第一条边的两个端点的坐标。
首先在有向图里搜索E1,直到找到与E1对应的有向图的边,并记录下边的编号E1以及E1的两个端点的坐标A、B。然后判断该移动授权所属列车运行的方向,在图4里列车运行的方向(direction=1)与有向图的方向相同。计算公式如下:边的长度用AB表示。By 表示B点的Y坐标,Ay表示A点的Y坐标,Offset表示偏移量。

根据方向确定移动授权的第一条边的两个端点(M、N)的坐标,即可以实现移动授权的第一条边的显示。
(4)求出移动授权的第二条边的两个端点的坐标。这里因为移动授权共占用了三条边,所以这里的两个端点的坐标与E2边的两个端点的坐标相同。
(5)求出移动授权的第三条边的两个端点的坐标。实现的方法与2)基本一致。这里就不在详述。
(6)根据求出的坐标用绿色的有方向的线段显示。
3.2.2 移动授权的实现界面
图6给出了列车在战场图上运行的信息,主要包括运行速度、驾驶模式、制动状态、移动授权等信息。本文主要讨论列车运行的移动授权信息,如图5中所示列车前面的绿色线路为移动授权,其中箭头表示列车的运行方向。

图6 战场图信息
4 结束语
实验结果经过实际测试运行成功,适合运行在windows 2000,windows XP等版本以上的操作系统上,VC++6.0为开发平台下实现。
基于CBTC的移动授权设计是基于CBTC的ATS系统里的一大特色,特别是本文通过有向图的方式来表示列车动态变化的移动授权信息,通过移动授权可以及时的知道列车的安全运行距离,使列车运行更加安全、更加高效、更加灵活,特别是大大的增加同时在线路上通行的列车容量。
[1]谢凡,李开成.城市轨道交通CBTC系统的数据传输子系统的研究[D].北京:北京交通大学,2006.
[2]黄锐.基于通信的列车控制系统[J].铁道知识,2005.
[3]黎文边,刘军,钟章队.世界轨道交通,2005.
[4]钟章队,李旭,蒋文怡.铁路综合数字移动通信系统[M].北京:中国铁道出版社,2003.