一种调车防护系统的研制
2016-02-02姚孝刚
姚孝刚
(广州铁路(集团)公司科学技术研究所,广东广州510100)
一种调车防护系统的研制
姚孝刚
(广州铁路(集团)公司科学技术研究所,广东广州510100)
介绍一种适用于对平面无线调车进行防护的设备的研制。该设备由蓝灯防护装置、显示终端、地面信号接收器、地面应答器组成。机车进入调车模式时,利用地面应答器获取信号机状态、机车位置信息和线路坡度信息,根据牵引工况,计算出制动曲线和报警曲线,当速度超过报警速度时报警,超过制动速度时紧急制动,防止机车超速、闯蓝灯和挤道岔。
平面无线调车;蓝灯;防护;应答器;挤岔
随着国民经济的快速发展,铁路运输发挥的作用越来越重要,因此铁路运输生产各个环节的安全日益凸显。在铁路车站或调车场内,为了保证在调车作业时不挤坏未开通的道岔,在道岔前设置信号机进行提示。但这种无声静态的信号机,无法保证调车作业时不闯过蓝灯状态的信号机,挤坏道岔。而这种闯蓝灯酿成事故的现象在全路各地时有发生,给铁路运输生产秩序带来严重不良影响。目前全路采用两种模式的调车系统对调车作业安全监控。
(1)调车安全监控系统。此模式适用于专调机车,将进路、调车计划(含车数、换长)、速度限制、动车距离限制等信息复示在机车的LKJ显示屏上,通过LKJ的调车控车模式控制调机动作,能够防止调机闯蓝灯。因造价高,只在大的调车场中使用。
(2)平面无线调车系统。调车长手持无线终端(扩展功能的无线对讲机)与机车的无线电台建立无线通信,由调车长手持无线终端控制调机车设备,通过进入调车状态监控装置进行调车控制。此模式造价低,在小站场中广泛使用。但需人工操作,存在不安全因素。如在调车作业中,由于电池等非人为因素造成电台设备故障或者通讯故障,或司机及调车组人员误判行车信号,停车不及时,从而造成调车闯蓝灯挤道岔等事故。
因此,研制一种既安全可靠又造价相对低廉的设备,解决平面无线调车系统闯蓝灯(以下简称调车防护系统)问题是相当重要的。
1 系统组成
1.1 总体结构
如图1所示,调车防护系统由车上设备和4个地面应答器组成。车上设备包括一个蓝灯防护装置、2个显示终端和一套地面信息接收器组成。

图1 调车防护系统结构图
蓝灯防护装置的主要作用,是防止机车在调车作业时越过蓝灯状态的地面信号机。要实现这个目标,蓝灯防护装置需要获得3个方面的信息,即机车的牵引工况、地面信号机的状态和机车位置信息等。
地面信号机的状态指机车运行前方,最接近的地面信号机是白灯还是蓝灯。白灯允许机车通过,蓝灯则禁止机车通过。地面应答器通过安装在信号机内的互感器,读取并储存蓝灯和白灯状态。当安装在机车的地面信息接收器通过应答器的上方时,储存在应答器内的信号机状态信息、应答器位置信息和线路坡度信息,便被读取到机车上的蓝灯防护装置内。
机车的运行工况,如速度和运行方向等,通过机车上的连线,直接引入装置内。列车编组信息等可通过优盘输入或显示终端按键输入。
蓝灯防护装置以获得的上述各种信息作为依据,计算出机车运行的制动曲线和报警曲线,送至安装在司机台上的显示终端显示,并根据制动曲线和报警曲线控制机车运行,完成蓝灯防护功能。
1.2 地面应答器位置的确定
4个地面应答器分别安装在信号机前4根轨枕的中央,按图2所示距离分布。

图2 地面应答器布置图
根据文献[1],列车制动距离计算公式如下:

Sk为列车空走距离,m;
Se为列车有效制动距离,m;
v0为制动初速,km/h;
θh为列车换算制动率;
ij为制动地段的加算坡度千分数;
Φh为列车换算摩擦系数;
ω0为列车单位基本阻力,N/k N;
βc为常用制动系数;
v1,v2为制动时速度间隔的初速和末速,km/h;
tk为列车空走时间,s。
根据文献[2]列车在调车作业时,牵引运行时限速40 km/h,推进运行时限速35 km/h。按制动初速v0=40 km/h,分别计算(1)SS4,(2)SS7,(3)SS8,3种有代表性的机车单机运行时的紧急制动距离,其他机车可照此计算。平道取ij=0,单机运行时tk=2.5 s,紧急制动时βc=1。


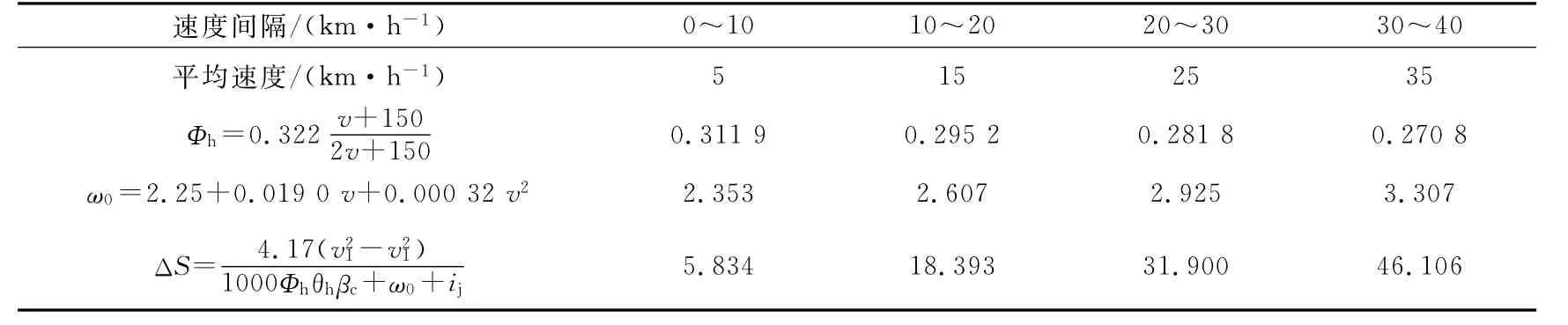
表1 SS4机车单机运行时制动距离计算表
Se=∑ΔS=5.834+18.393+31.900+46.106=102.2(m)
Sz=Sk+Se=27.8+102.2=130(m)
若机车运行在-6‰的坡道上,ij=-6,则可算出Se=112.6 m,Sz=140 m。
(2)SS7制动距离计算。SS7原闸瓦为铸铁,利用不同摩擦材料换算闸瓦压力的二次换算系数0.625,换算成高摩合成闸瓦。经计算,Sz=88 m。
若机车运行在-6‰的坡道上,则Sz=91.5 m。
(3)SS8制动距离计算。SS8原闸瓦为粉末冶金,利用不同摩擦材料换算闸瓦压力的二次换算系数0.8,换算成高摩合成闸瓦。可算出,Sz=120 m。
若机车运行在-6‰的坡道上,则可Sz=128 m。
下面是计算机车牵引列车时的紧急制动距离。
(4)SS7牵引G=3 500 t的货物列车,编组48辆,其中GK、120型制动机重车位42辆,空车位3辆,关门车3辆。运行在平道上,计算以初速v0=40 km/h时施行紧急制动的制动距离。
∑kh=840+42×250+3×160=11 820(k N)
列车换算制动率:

空走时间:
tk=(1.6+0.065n)(1-0.028ij)=(1.6+0.065×48)×(1-0.028×0)=4.72(s)
空走距离:
Sk=0.278v0tk=0.278×40×4.72=52.486(m)
后续计算过程见表2。
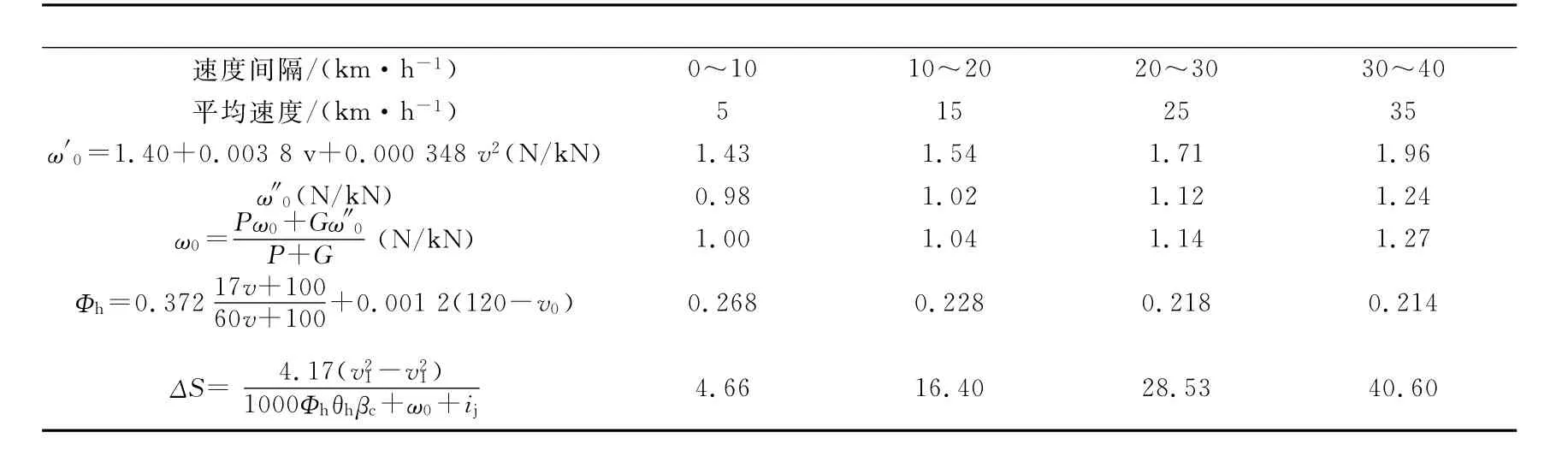
表2 SS7机车牵引3 500 t列车时制动距离计算表
S e=ΣΔS=4.66+16.40+28.53+40.60=90.20(m)Sz=Sk+Se=52.486+90.20=143(m)。
若此列车运行在-6‰的坡道上,则tk=5.51 s,Sk=61.27 m,Se=98.18 m,Sz=159 m。
(5)SS4牵引G=3 500 t的货物列车,编组50辆,其中GK、120型制动机重车位44辆,空车位3辆,关门车3辆。运行在平道上,计算以初速v0=40 km/h时施行紧急制动的制动距离。
按(4)的计算可得Sz=144 m。
若此列车运行在-6‰的坡道上,则Sz=161 m。
(6)SS4牵引G=5 000 t的货物列车,编组50辆,其中GK、120型制动机重车位44辆,空车位3辆,关门车3辆。运行在平道上,计算以初速v0=40 km/h时施行紧急制动的制动距离。
经计算得Sz=180.6 m。
若此列车运行在-6‰的坡道上,Sz=206 m。
从(1)至(3)的计算可以看出单机运行时,各种机车在40 km/h初速下的制动距离是不同的,相差很大。最短的SS7,Sz=88 m;最长的为SS4,Sz=130 m。SS4机车的制动距离加算坡度千分数后,达到140 m。
从(4)至(6)的计算可以看出,用不同的机车(由SS7改为SS4G)牵引,及牵引辆数稍许变化(从48变为50),制动距离变化不明显,从143 m变为144 m,仅0.7%。当在-6‰的坡道上运行时,制动距离由159m变为161m,也变化不大,仅1.26%。但牵引质量由3 500 t增加到5 000 t时,制动距离增加很多。同是SS4G机车牵引,在平道上运行时,Sz由144 m延长为180 m,在-6‰的坡道上运行时,Sz由161 m延长为206 m。
3种机车单机运行时,制动距离最长的SS4,Sz=130 m。在牵引3 500 t列车时,制动距离为144 m,制动距离有增加,但不多,仅10.8%。因此当机车牵引列车时,制动距离受所牵引的列车质量影响很大,牵引质量增加会使制动距离增长。牵引列车后,制动距离有所增加,并且在下坡道中,制动距离会延长。
在-6‰的坡道上牵引5 000 t的列车,并以40 km/h的速度进行调车作业是小型站场调车的极限情况了。以此计算得到的最大的制动距离206 m作为计算S1的基础值。地面信息接收天线安装在单节机车中部(双节机车则安装在头部,各节车一套),因此再加上半个车长20 m×0.5得216 m。取整得S1=220 m。S1即是1#应答器距离信号机的距离。对于短股道,S1取信号机到股道端头的实际长度。机车运行时,蓝灯防护装置可从1#地面应答器中读取到S1的实际值,以此实际值进行报警曲线和制动曲线的计算,对机车进行防护。
4#地面应答器的作用是用来定位蓝灯防护区的结束及感知机车反向进入蓝灯防护区。4#地面应答器也用来当机车停在信号机前,因误判白灯信号而起动机车的防护。此时机车刚起步,速度一般在5 km/h以下,以10 km/h来考虑。同样以极限情况(6)来计算,在-6‰的坡道上,tk=5.66 s,Sk=15.73 m,Se=6.32 m,Sz=22 m,制动距离再加一半车长得32 m,取S4为35 m。当股道较短时,S4可缩短至25 m(因制动初速由5 km/h放大到10 km/h,放大了一倍)。
2#和3#地面应答器起辅助防护作用。一是校正机车根据速度计算距信号机的距离的误差;二是在蓝灯防护区内,提早感知信号机行车信号的变化。当股道较短时,可取消2#或3#地面应答器,或同时取消。2#地面应答器安装在防护区的位置处。S=(220-35)×
2+35=158.3(m),取整S2=160 m。3#地面应答器安装在防护区的位置处。S=(220-35)×+35=
396.7(m),取整S3=100 m。S2和S3可根据股道在长短进行调整,甚至不安装2#或3#地面应答器。当只安装其中一个时,位置取在蓝灯防护区的中间。
1.3 硬件结构
车上的硬件连接如图3。
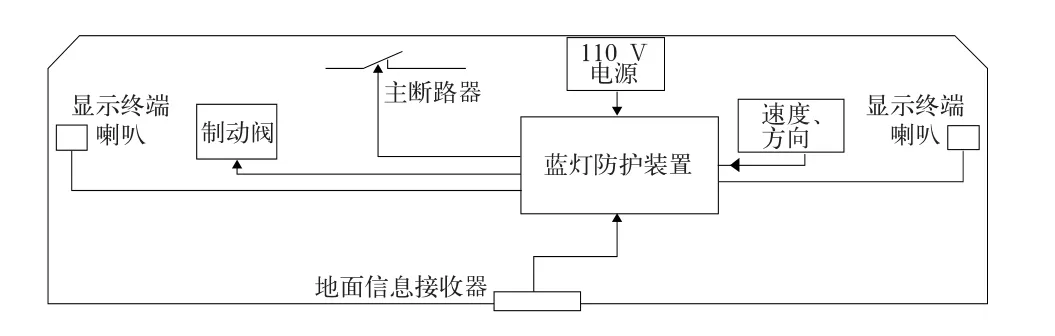
图3 车上接线图
1.3.1 蓝灯防护装置
蓝灯防护装置是系统的核心硬件,负责地面应答器信号的接收、机车运行工况信息的获取、列车编组信息的读入、显示终端和喇叭信息的输出、根据所获取的信息计算出报警曲线和制动曲线,并进行实时报警和制动。装置的内部框图如图4所示,装置的实物如图5所示。

图4 蓝灯防护装置内部框图

图5 蓝灯防护装置车上安装图
1.3.2 地面信息接收器
地面信息接收器负责与地面应答器的通讯,由地面信息接收天线、CPU单元、RAM、电源模块和通讯接口单元组成。上电后,接收器向车底发送查询信号。当车底有地面应答器时,应答器收到查询信号,便把储存的信息,发送回地面信息接收器。接收器通过485通讯口,把收到的信息发送到蓝灯防护装置。接收器由蓝灯防护装置供给DC 12 V电源。接收器的实物安装图见图6。地面信息接收器可在机车以200 km/h速度运行时,完成地面应答器信息的读取。
1.3.3 地面应答器
地面应答器由天线、射频标签蕊片WM72016、低功耗单片机C8051F930及外围电路和蓝灯白灯信号接口组成。如图7所示。虚线框内的白灯互感器和蓝灯互感器安装在站场的信号机内,通过接口电路为地面应答器供电,并获取信号机内是蓝灯点亮还是白灯点亮。地面应答器功耗极低,DC 5 V 6 m A即可正常工作。地面应答器的现场安装见图8。
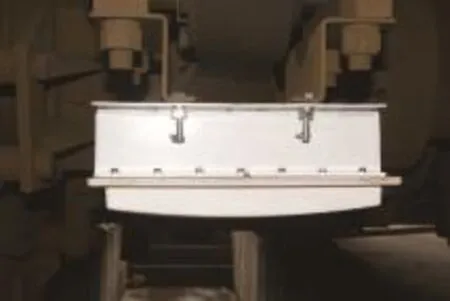
图6 地面信息接收器安装图
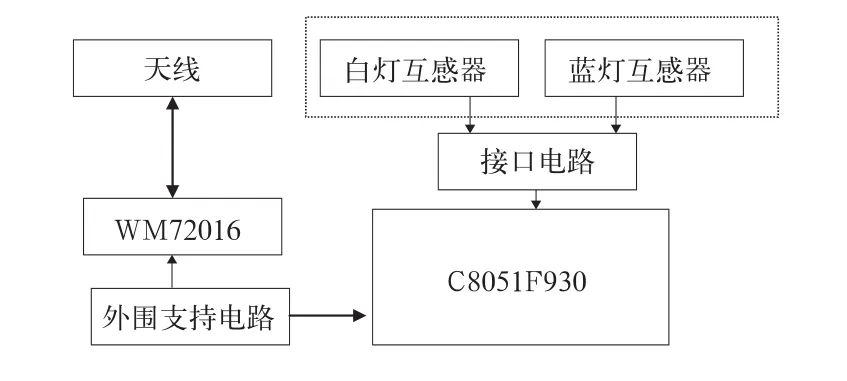
图7 地面应答器原理图

图8 地面应答器安装图
1.3.4 显示终端
显示终端安装在司机台上,显示报警曲线、制动曲线和机车实际运行曲线,输入列车编组信息,见图9。蓝灯防护装置通过485接口与显示终端通讯。用作报警的嗽叭也安装在显示终端内。
图9 显示终端安装图
2 工作原理
在给定的牵引工况和线路条件下,根据制动距离Sz计算公式,可做出紧急制动距离与制动初速v0的关系曲线,称为制动曲线。紧急制动距离减20 m后与制动初速v0的关系曲线,称为报警曲线。见图10。
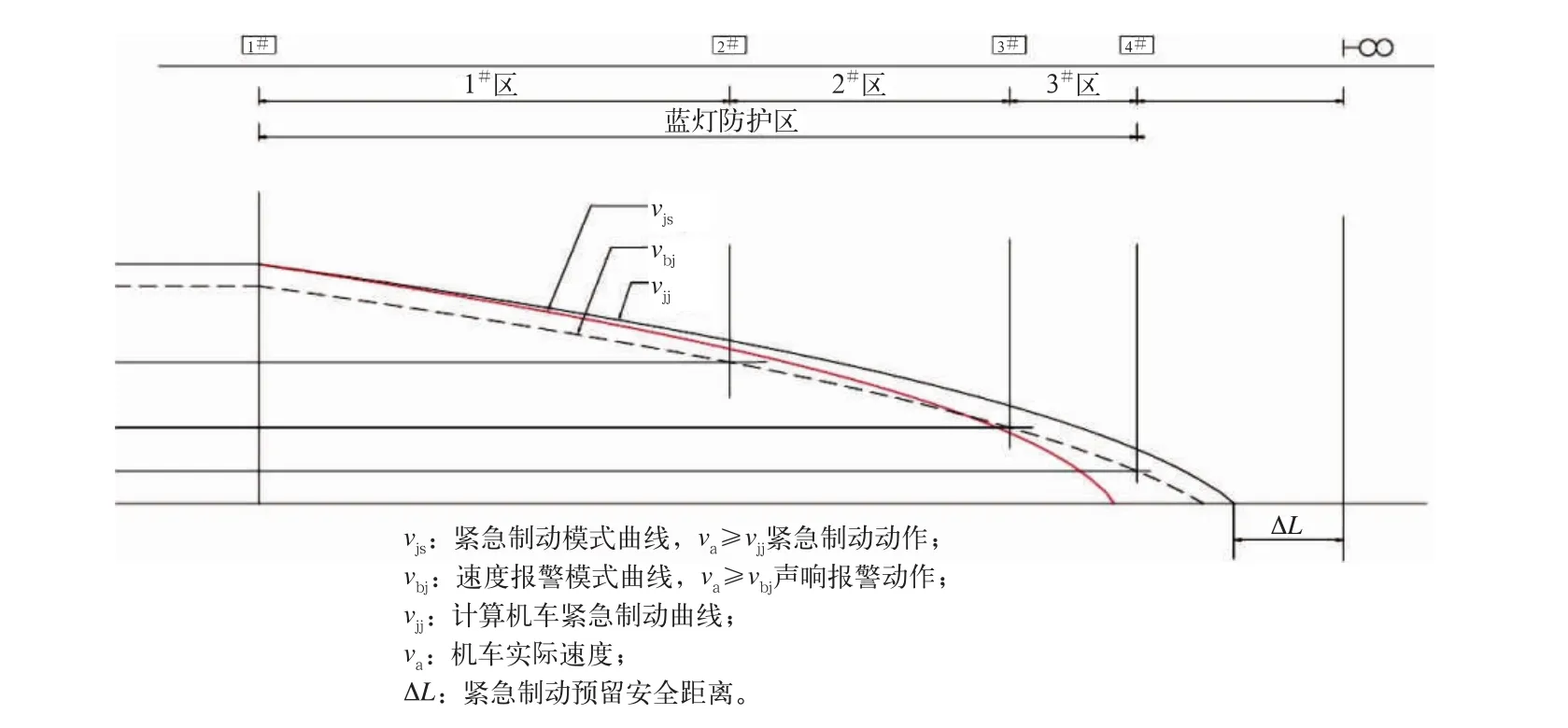
图10 制动曲线和报警曲线
当蓝灯防护装置上电后,有优盘插入时,更新列车的编组信息。当机车运行,收到1#应答器内的位置信息、坡道信息和蓝灯状态后,若白灯亮,则不防护,只储存好信息;否则进行防护,计算报警曲线和制动曲线,并根据当前速度是否超过报警速度或制动速度进行报警或制动。当收到2#应答器内的信息时,若白灯亮则取消防护;否则对距离、报警曲线和制动曲线修正,继续防护。同样,当收到3#应答器内的信息时,若白灯亮则取消防护;否则对距离、报警曲线和制动曲线修正,继续防护。当收到4#应答器内的信息时,若白灯亮则取消防护;否则跳主断,并紧急制动。当机车反向进入防护区域时,先收到4#应答器内的信息,装置不进行防护,只储存了信息。再依次收到3#、2#、1#应答器内的信息都做同样处理。若收到以上任一应答器内的信息后,机车改变运行方向,则根据储存的信息和运行距离,计算报警曲线和制动曲线,进入防护状态,直到退出防护区。
3 改进过程
样机制作完成后,在广州站装车试验。在广州站10道D60信号机前安装了1#,2#,3#,4#应答器,在广州站专调机车DF51387上安装了蓝灯防护装置车上设备。经过运行考验,系统达到了设计要求。同时也发现应答器与信号机的有线连接,在现场施工时,工作量比较大,因此做如下改进。
取消应答器与信号机的有线连接,应答器改为无源标签,只存储位置信息、坡道信息和前方调车信号机标识信息,不再获取蓝灯和白灯状态信息。蓝灯和白灯状态信息由安装在信号机内的无线模块发送到机车内。机车上安装对应的无线模块和天线。当机车收到应答器信息,进入防护区时,激活前方信号机的无线模块;当机车收到应答器信息,退出防护区时,使当前信号机的无线模块休眠。信号机内的无线模块激活后,向机车发送一次蓝灯和白灯状态信息。当机车询问或蓝灯和白灯状态变化时,再次向机车发送一次蓝灯和白灯状态信息。
这样,整套调车防护系统成为一套易于施工,易于安装,可靠实用的防护设备。
[1] 张中央,列车牵引计算[M].中国铁道出版社,2009.
[2] 中国铁路总公司,铁路技术管理规程[M].北京:中国铁道出版社,2014.
[3] 苏 桃.列车牵引计算与操纵[M],北京:中国铁道出版社,2008.
[4] GB/T 25340-2010.铁路机车车辆自动识别设备技术条件[S].
Development of a Shunting Protection System
YAO Xiaogang
(Institute of Science and Technology,Guangzhou Railway(Group)Corporation,Guangzhou 510100 Guangdong,China)
This paper introduces the research and development of a protective equipment suitable for plane wireless shunting.The equipment consists of the blue light protective device,display terminal,ground signal receiver and ground transponder.During shunting mode,locomotive gets the signal status,the locomotive position information and line gradient information through ground transponder,then calculates the braking curve and alarm curve according to the traction condition,and alarms when the speed exceeds the alarm speed or brakes urgently when the speed exceeds braking speed,which can prevent the locomotive from overspeed,crossing blue light and splitting switch.
plane wireless shunting;blue light;protection;transponder;switch split
U268.2
A
10.3969/j.issn.1008-7842.2016.06.13
1008-7842(2016)06-0049-05
7—)男,高级工程师(
2016-05-05)
