DQ-90型顶驱上卸扣装置的自动化控制研究
2016-01-29古晖晖张洪生
古晖晖,张洪生
(兰州理工大学 机电工程学院,甘肃 兰州 730050)
DQ-90型顶驱上卸扣装置的自动化控制研究
古晖晖,张洪生
(兰州理工大学 机电工程学院,甘肃 兰州 730050)
摘要:顶驱装置由导轨-导向滑车总成,水龙头-钻井马达总成和钻杆上卸扣装置三大部分构成。根据对其DQ-90型顶驱钻杆上卸扣的工作原理及运动情况分析,提出了用西门子可编程控制器S7-300PLC对其自动化控制的方案。该方案包括各个工作机构控制硬件配置的选用和现场总线的连接设计,待硬件配置连接确定后,根据上卸扣的工作流程及PLC开关和线圈的接线地址进行控制部分的程序编写。程序调试在STEP7-SIMATIC Manager 中进行,最终以达到上卸扣装置自动化控制的目的。
关键词:DQ-90型顶驱;上卸扣;可编程控制器;编程
Research on Automatic Control of Make Up and Break Out Device of
DQ-90 Top Drive Drilling System
GU Huihui, ZHANG Hongsheng
(College of Mechanical-Electronical Engineering, Lanzhou University of technology, Lanzhou 730050, China)
Abstract:Top drive drilling system is comprised of the carriage and guide beam, the transmission /motor housing (main body) and swivel assembly and the make up and breaks out device. This article proposes that siemens programmable controller S7-300PLC is used to study the scheme of the automation control according to the working principle and the movement of the make-and-break device in DQ-90 top drive drilling system. This scheme includes the selection of control hardware configuration for each woking mechanism and fieldbus connection. After the hardware connection is determined, the program is written in STEP7 SIMATIC Manager according to the working principle and the movement of the device and the address of the coil and the switches of the PLC. Thus the make up and break out device is made get into the automatic control.
Keywords:DQ-90 top drive drilling system;make up and break out; PLC; programming
0引言
顶驱作为钻井设备的先进系统,与其他的钻井设备相比,其先进性和优越性显而易见。顶驱是一个复杂的系统,其控制也非常复杂。目前的顶驱都是采用的是电、液联合控制或者电、液、气联合控制。上卸扣装置作为顶驱上一重要环节,体现了顶部驱动钻井装置最大优点,对其进行自动化控制研究是很有意义的[1]。文中对顶驱上卸扣部分做电控方面的研究,采用的是S7-300西门子可编程控制器。
1DQ90型顶驱上卸扣装置的运动分析
1.1DQ-90型顶驱上卸扣装置的构成
上卸扣装置主要组成部件有: 扭矩背钳、内防喷器和启动器、承载法兰盘、吊环倾斜装置、旋转头/吊环连接环和钳头有夹紧活塞,用以夹持与保护接头相连接的钻杆母扣。钻杆上卸扣装置另有2个缓冲液缸,类似大钩弹簧,可提供丝扣补偿行程125mm。
内防喷器是全尺寸、内开口、球型安全阀式的。带花键的远控上部内防喷器和手动的下部内防喷器形成井控防喷系统,内防喷器采用正规扣,工作压力为105MPa。
吊环倾斜装置有两种功用:
1) 吊鼠洞中的单根;
2) 接立柱时,不用井架工在二层台上将大钩拉靠到二层台上。若行程1.3m的倾斜装置不能满足要求则可选择2.9m的长行程吊环倾斜装置[2]。
DQ90型顶驱上卸扣装置的示意图如图1所示。
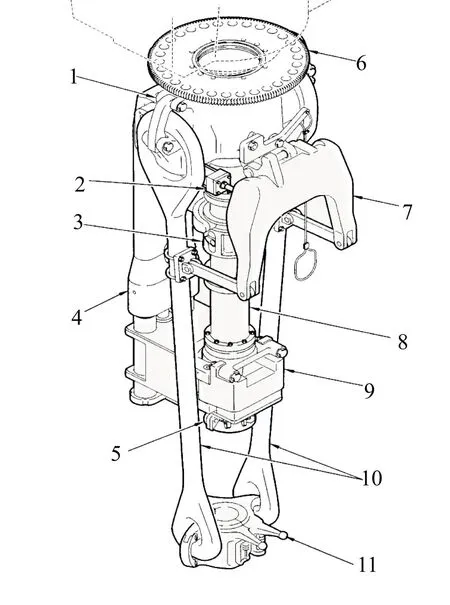
1—吊环配接器;2—吊环倾斜装置液压缸;3—遥控式内防喷启动器;4—反扭矩架;5—可调式导向口;6—吊卡定位器;7—双向吊环倾斜装置总成 ;8—手动内防喷阀;9—扭矩背钳;10—吊环;11—钻杆吊卡图1 上卸扣示意图
钻进时,钻杆上卸扣装置固定不动,不妨碍钻柱的起下,钻井马达通过主轴,内防喷器和保护接头将扭矩传给钻柱,驱动钻柱旋转[3]。
1.2上卸扣装置的运动情况分析
顶驱的钻进分3种情况,分别为:接立根钻进(普遍的采用方式);接单根钻进(开新井和井下马达造斜);倒划眼(防止粘卡和减少井下键模卡钻)。
接立根钻进顶驱的工作流程为:坐放卡瓦,停止循环,用管子处理装置和钻井电机卸开连接口(电机反转);提升游车,吊环倾斜装置摆至井架;用吊卡提升立根,将立根下端和钻柱对扣;放下游车将电机下端与立根顶端对扣,旋转电机和立根连接口,用电机紧扣;提升卡瓦,开泵循环,恢复钻进。
接单根钻进顶驱的工作流程为:坐放卡瓦,停止循环,关闭防喷阀,用管子处理装置和钻井电机卸开连接口;吊环摆至鼠洞,扣好钻杆吊卡,用吊卡提起单根,松开吊环倾斜装置,将单根下端与钻杆对扣;下放游车,将电机下端与单根上端对扣,旋紧电机与单根丝扣,用电机紧扣;提升卡瓦,开启防喷阀,开启循环,恢复钻进。
倒划眼时顶驱的工作流程为:在循环和旋转的同时提升游车;当露出第3根钻杆接头时,停止循环和旋转;坐放卡瓦,用管子处理装置和钻井电机卸开连接扣,在钻台上卸开立根;用吊卡提升已卸开立根;用吊环倾斜装置放回立根;下放游车,将电机接头插入钻杆母口,用电机旋紧连接扣,开泵循环,提出卡瓦,提升和旋转[2]。
由以上的三种工作情况可以看出,每种不同的情况下,顶驱上卸扣各个部件的工作顺序和运动方式也不一样,此时控制部分的设计研究需分别进行。
2控制部分的设计
2.1上卸扣装置各个部分的开关选择
根据上卸扣装置的各个部件的工作运动情况对其进行液压电磁阀开关的分配,IBOP(内防喷器)的控制开关记为SK1。扭矩背钳液压缸电磁阀的双向控制开关记为SK2(背钳夹紧开关)SK3(背钳松开开关)。背钳夹紧液压缸内装置以压力传感器,其开关记为SP1背钳上还应置1个扭矩开关,用来控制电机紧扣,此记为ST。双向吊环2个液压缸可用一电磁换向阀,向前开关记为SK4,向后记为SK5,吊环还有几个定位开关,分别为鼠洞位置SQ1,井架工位置SQ2,钻进位置SQ3。为防止影响顶驱钻进,吊环向后有一极限位置,此处不再设开关。吊卡的张开和闭合开关记为SK6和SK7。吊卡闭合夹紧钻杆后,此处可在其液压系统中置一压力开关SP2。游车有3个位置开关,钻至钻台时1个自动停止开关SK8,单根钻进时离SK8向上9 m处置1个自动停止开关SK9,立根钻进时离SK8向上27 m处置1个自动停止开关SK10。
2.2控制部分硬件的选择及连接
S7-300具有很高的电磁兼容性,抗震动和抗冲击等优点,编程软件功能强大,可使用多种编程语言,而且可为所有的模块和网络设置参数。所以此控制系统选用了S7-300可编程控制器。上位机的选择,可选择安装了WinCC软件的PC作为上位机。控制器即为S7-300。现场模块化的I/O系统采用ET200S或者ET200M,但基于现场工作环境和所需性能的考虑,采用了ET200M。上位机通过Profibus与PLC连接,PLC通过Profibus-DP与控制柜和变频器进行连接,与其他子站也通过Profibus-DP连接。总体是以PLC为中心,通过现场总线控制技术,实现对上卸扣装置远程数据传输通讯、监事和控制。具体连接示意图如图2 所示[4]。

图2 现场连线示意图
3PLC程序编写及仿真
3.1STEP7的介绍
STEP7是西门子的工业软件,用于PLC进行组态和编程的软件包。一个程序的编程包括硬件组态;定义符号地址,即开关和线圈的地址分配。然后就是程序块编写。程序块包括主程序OB1和其他子程序。STEP7标准软件包有3种编程语言:梯形图LAD,语句表STL和功能块图FDB。梯形图直观简单;语句表包含丰富的指令,熟悉其语言的程序员对这种编程语言比较容易理解;功能块图使用不同的功能盒,盒中的符号表示功能。STEP7支持这3种语言的混合编程和相互转换[5-6]。根据顶驱3种不同运动情况,上卸扣装置各个部分的运动情况不定,可以编写3个不同的子程序块,当需要哪个程序块时再调用。
3.2程序编写
打开软件,在STEP7中先生成机架,然后再选出PLC的模块。在整个顶驱控制中需要很多开关和线圈,但上卸扣部分不是特别多,在模拟控制中,选取的模块地址够用即可。机架1号槽选用PS307 5A,此为电源模块。2号槽选用CPU315-2 DP(1),此为CPU模块,固件版本号为2.0,MPI地址为2。3号槽为接口模块,实际不存在。4号
槽以后为其他模块,包括信号模块,功能模块,接口模块。4号槽模块选用DI16xDC24V Interrupt。5号槽模块选用DO8x24V/0.5A。6号槽和7号槽模块分别选用AI8x12Bit和AO2x12Bit。
文中仅对接立根上扣时顶驱上卸扣装置的控制做设计研究,进行符号地址定义和程序编写。此时可另外两种工作情况以此为例,很容易得出。以下为定义符号地址图如图3所示:

图3 符号表
根据符号表和接立根上扣时上卸扣装置的工作情况编写程序,程序如图4所示。
此程序完成后,电机正旋上扣紧扣,等背钳内置的扭矩传感器达到额定值时,开关ST通电,电机停止旋转,上扣工作完成,可以提升卡瓦,进行循环钻进工作。以此为例,对于其他情况下上卸扣装置的工作,也很容易设计出控制程序,然后根据不同的情况,调用相应的子程序。
4结语
以S7-300PLC为中心通过现场总线技术对DQ-90型顶驱进行自动化控制代替了很多人工作业,很大程度上提高了工作的安全性,使顶驱装置操作起来更为方便快捷。
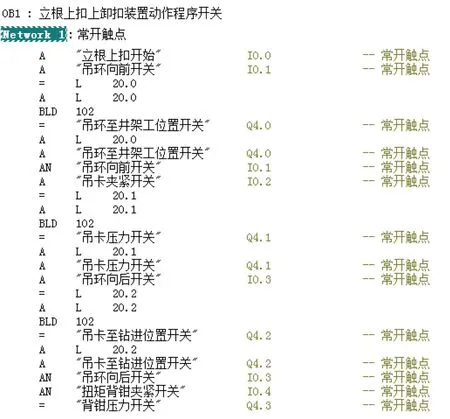
图4 接立根上扣程序图(STL)
参考文献:
[1] 陈朝达. 顶部驱动钻井装置(一)[J]. 石油矿场机械,2000,29(3):1-5.
[2] 陈朝达. 顶部驱动钻井装置(二)[J]. 石油矿场机械,2000,29(4):1-5.
[3] 任福深,王威,刘晔,等. 石油管柱上卸扣装置技术现状[J]. 石油机械,2012,40(5):15-18.
[4] 廖常初. 跟我动手学S7-300/400PLC[M]. 北京:机械工业出版社,2010.9.
[5] 葛运锋,汤钰鹏. 西门子SIMATIC S7-300在顶部钻井驱动装置中的应用[J]. 许昌学院学报,2007,26(2):26-35.
[6] 郝洪亮,常珍,张飞. 基于WinCC的监控系统在钻井顶驱系统中的应用[J]. 装备应用与研究-机电信息,2013,(9):36-3.


收稿日期:2014-01-21
中图分类号:TP273
文献标志码:B
文章编号:1671-5276(2015)04-0192-02
作者简介:古晖晖(1985-),男,河南三门峡人,硕士研究生,研究方向为机电工程。
