一种关节式轮履混合机器人的设计与运动分析
2016-01-29吕海洋费燕琼宋立博
吕海洋,费燕琼,宋立博
(上海交通大学 a. 机器人研究所, b. 工程训练中心, 上海 200240)
一种关节式轮履混合机器人的设计与运动分析
吕海洋a,费燕琼a,宋立博b
(上海交通大学 a. 机器人研究所, b. 工程训练中心, 上海 200240)
摘要:针对移动机器人在发展中存在的问题,综合轮式、履带式等不同移动机构的特点,设计了一种关节式轮履混合机器人,详细分析了其机械结构。该机器人具有多种运动模式,根据运动环境的不同,可以在纯轮式运动与纯履带式运动间切换。基于齐次坐标变换矩阵分析了机器人的质心稳定性与越障性能,建立了其质心方程与越障方程。实验证明,这种机器人能够充分发挥轮式运动与履带运动的优点,机动灵活,速度快,并且具有很强的地形适应能力和越障能力。
关键词:轮履混合机器人;移动机构;越障性能
Design and Motion Analysis of One Articulated Wheel-track Hybrid Mobile Robot
LV Haiyanga, FEI Yanqionga, SONG Libob
(a. Institute of Robotics, Shanghai Jiaotong University,
b. Engineering Traning Center, Shanghai 200240, China)
Abstract:This paper designs a kind of wheel-track hybrid robot according to the problems existing in the development of mobile robot and respective performance of different moving mechanism. The robot moves in many patterns according to different moving environment, that it can move in pure wheel pattern or pure track pattern. It also analyzes the gravity stability and obstacle performance based on the homogeneous coordinate transformation matrix and establishes its gravity equation and obstacle climbing equation. Experiments show that this robot can fully exert the advantages of wheel mechanism and track mechanism and is equipped with a good obstacle climbing capability.
Keywords:wheel-track hybrid robot; moving mechanism; obstacle performance
0引言
移动机器人在侦察、巡视、警戒、扫雷等危险、恶劣环境中有着广阔的应用前景。机器人的移动机构主要有三种类型:轮式机构、履带式机构和腿式机构。
轮式机器人机械结构简单、能耗低、机动灵活、能够达到很高的移动速度,但其在湿滑、松软路面易打滑,地形适应能力与越障能力差[1]。典型的轮式机器人有卡内基梅隆大学研制的Nomad极地探险车[2],Songyi Dian, Tao Liu等人研制的新型Shrimp机器人[3]。履带机器人支撑面积大,牵引附着性能好,拥有较高的越障能力和良好的环境适应性,但其能耗高,效率低,速度相对较慢。典型的履带机器人有著名的“手推车”(Wheelbarrow)排爆机器人[4],能够独立进入战场与敌人作战的VIPER[5],德国研发的模块化排爆机器人ASENDRO[6]。腿式机器人虽能够满足某些特殊的性能要求,适应复杂的地形,但机构过于复杂,要实现稳定高速的行走还有诸多难题需要解决。典型的腿式机器人如加州大学伯克利分校研制的DynaRoACH六足机器人[7],Zhiying Wang、Xilun Ding等人研制的圆形径向对称六足机器人[8]。
尽管移动机器人在相当多的领域拥有很好的发展前景,但也存在许多问题,如:1) 机器人执行任务时多处于非结构化环境中,地形复杂多变,其自身稳定性和环境适应能力需进一步提升;2) 履带机器人结构较为复杂,质量大,移动速度慢,灵活性有待提高;3) 履带机器人运行时与路面存在较大的摩擦阻力,能耗高,在长距离运行时尤为明显,提高其行驶效率至关重要[9]。
基于移动机器人存在的问题和不同结构移动机器人在性能上的差异,文中提出一种新颖的关节式轮履混合机器人,可以实现纯轮式运动与纯履带式运动。在远距离平坦路面时,机器人只依靠轮子运动,充分发挥轮式机构速度快、能耗低、机动灵活的优点;而在野外、草丛等不平坦路面,机器人只依靠履带运动,充分发挥履带机构地形适应能力强,拥有较高越障能力的优点。
1机器人结构设计
1.1总体结构(图1)
移动机器人前后左右均对称,没有车头和车尾的区别,在进入狭小的通道时,不需要担心掉头的问题,越障时,机器人也不需要调整车体的方位,提高了运行效率。高度的对称性也大大提高了零件的互换性。
移动机器人的2个驱动车轮配置在车体的中部,2个导向轮分别位于车体的前部和后部。当机器人处于轮式运动时,4个车轮着地,由中部的2个驱动轮驱动。4条履带摆臂完全相同,履带摆臂机构不仅能够驱动履带旋转,也能够绕驱动带轮的轮心轴线摆动。通过履带臂的摆动,机器人可以实现履带运动和轮式运动的切换:履带摆臂下摆时可将车体抬起,此时摆臂与地面贴合,轮子离地,机器人通过履带运行,实现纯履带运动;履带摆臂上摆时,机器人轮子着地,此时则依靠轮子驱动,实现纯轮式运动。履带摆臂的中间为中部车体,它是移动机器人的骨架,主要安装移动机器人的驱动装置嵌入式控制系统电池传感器及其他必要装置。

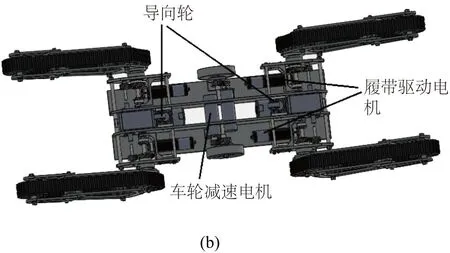
图1 机器人整体结构
1.2动力传递系统
(1)金融服务与城镇化进程不相匹配。社会主义的国家性质与当前的基本国情决定了需要有效整合社会资本与资源保障民生。贵阳市城镇化发展过程中,需要将教育、医疗、卫生、失业、养老等基础保障项目列为重点,构建规范性的城镇住房保障体系,容纳更多的城镇人口。但在实际过程中因政策解读与操作不到位、资金资源分配失衡等问题,不能有效解决贵阳市城镇化过程中出现的民生问题。
机器人的动力传动系统如图2所示,共有8个自由度。车轮部分有2个自由度,由中部的2个直流电机经一对末级直齿减速齿轮驱动,可实现高速运动。末级直齿减速齿轮主要是为了电机的合理布置;4条履带摆臂对履带的旋转驱动共有4个自由度,这主要是考虑到履带运动的阻力大、要在较差的路况下运动;履带臂的摆动共有2个自由度,由2个直流电机经蜗杆涡轮减速器驱动,从图2中可以看出位于同侧的2个履带摆臂由同一电机驱动。采用蜗杆涡轮减速器是为了实现摆臂的自锁,履带摆臂可360°摆动,有助于机器人在越障过程中实现丰富的运动姿态变化。从图2中也可以看出,移动机器人的驱动电机布置紧凑,车体空间的利用率较高,整个车体的质量得到了均匀、合理的分配。

图2 移动机器人动力传递图
1.3履带臂驱动装置
履带摆臂机构不仅能驱动履带旋转,也能实现摆动,这两种不同的运动都要绕驱动带轮的轮心轴线旋转实现。为此设计了图3所示的履带臂驱动装置来实现这两股动力的传递。图3中的减速电机用来驱动履带旋转,它固定在内支板上,通过一对锥齿轮将动力传到内轴上。采用锥齿轮是为了让减速电机沿车体纵向布置,避免与蜗杆涡轮电机干涉,并充分利用空间。内轴通过键与驱动带轮相联,使履带实现旋转运动,其轴承座位于内支板和外轴上。小轴与蜗杆涡轮电机通过刚性联轴器相连,刚性联轴器可保证同一蜗杆涡轮电机所驱动的履带摆臂是平齐的,小轴通过一对末级直齿减速齿轮将动力传到外轴上,减速齿轮一方面可将2个电机的驱动中心轴错开,实现两股动力的传递,另一方面可以增大对履带摆臂的驱动力矩。

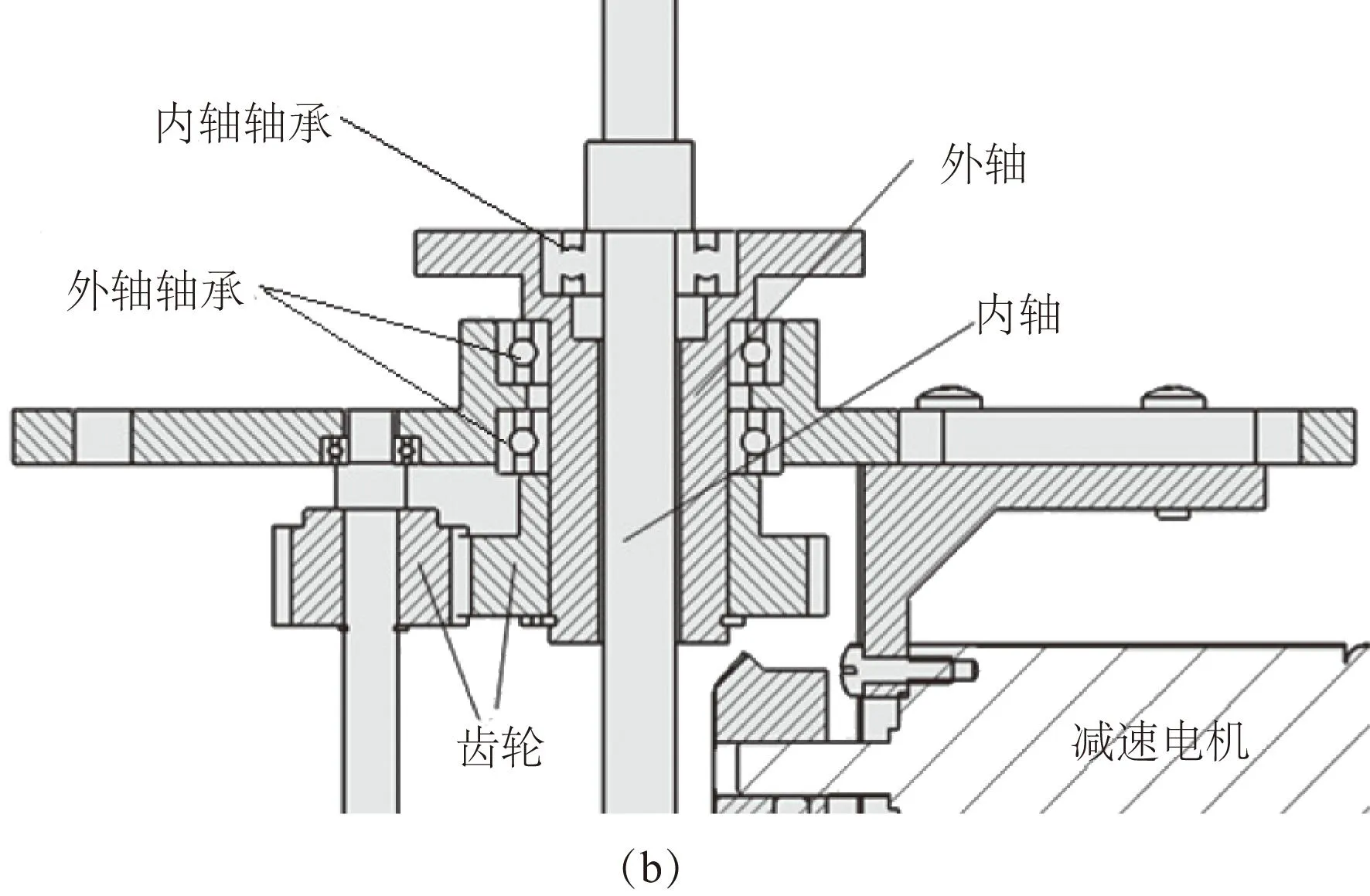
图3 履带摆臂驱动装置
1.4履带臂结构
履带臂结构如图4所示。
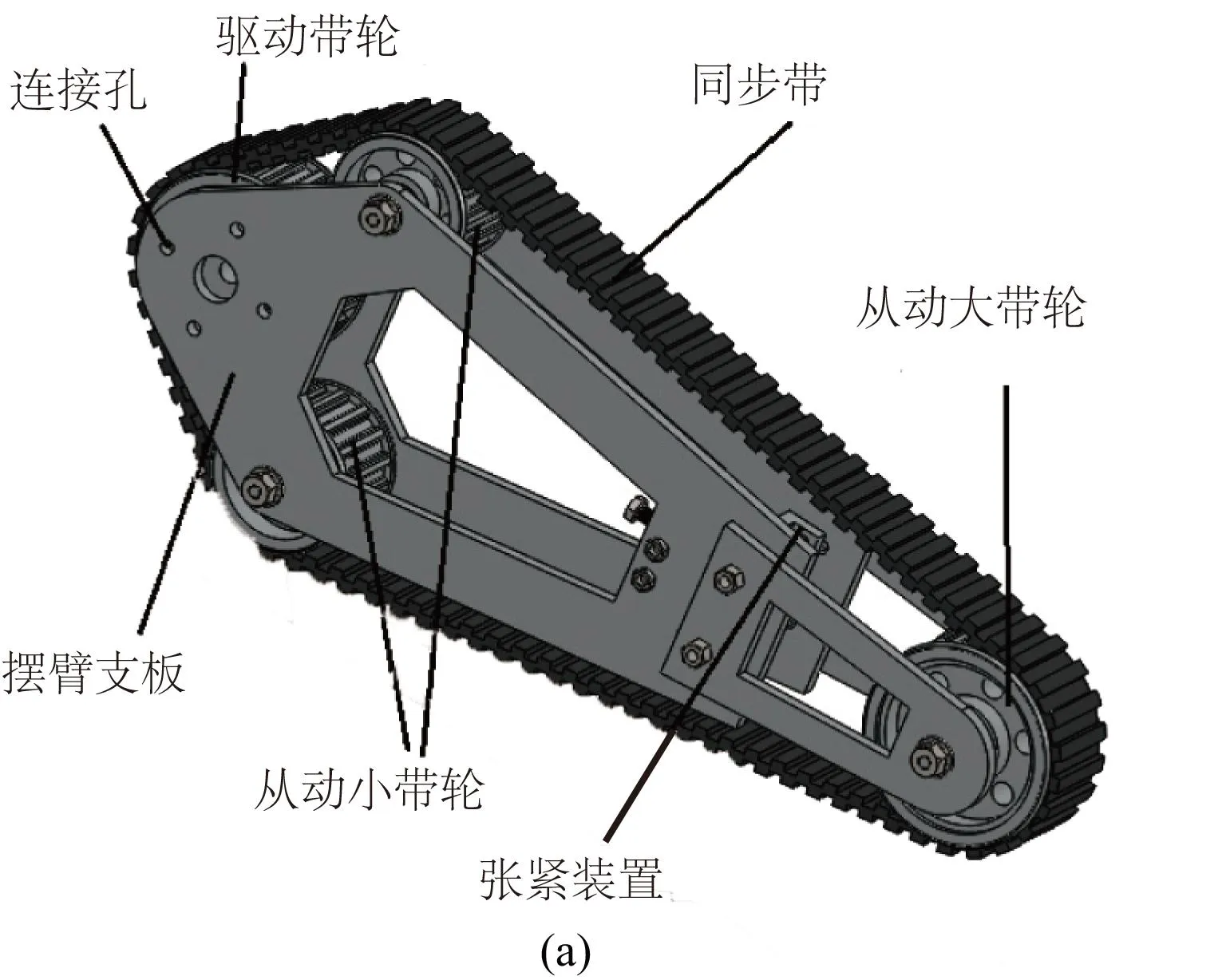

图4 履带摆臂结构
为了使履带下摆至与地面完全贴合时,车轮能够完全脱离地面,将履带摆臂设计成对称的四边形结构,对称性使得摆臂既能前摆亦可后摆。四边形的4个顶点处各有一个带轮,其中只有一个为驱动轮,其他均为从动轮。
在运行过程中,尤其是越障时,履带与地面间可能会由面接触转变为线接触,所以履带上要有一定的张紧力。履带臂上采用支撑轮,考虑到文中的履带摆臂较长且两条边均可接地运行,若添加支撑轮,其数量会很多,不仅会增大摆臂的质量,也会极大增加机构的复杂程度。所以选取张紧螺钉和张紧滑块作为张紧装置,通过旋转张紧螺钉使得张紧滑块在导槽中移动实现张紧,最后由锁紧螺栓固定。
2机器人运动模式
2.1轮式运动(图5)

图5 轮式运动
当履带摆臂举起时,机器人只有车轮着地,此时可实现纯轮式运动,拥有轮式移动机构的所有优点,适用于路况较好时。
2.2履带运动
图6(a)中为双节式配置,图6(b)中为三节式配置,此时机器人与地面接触面积大,能够适应松软、泥泞以及不平坦的路况,拥有履带机构的优点,主要适用于草丛、野外等路况差的情况。图6(c)中运动模式类似腿式移动机构,一方面能够直接越过较低较窄的障碍物,另一方面增加了车体的净空高度,对中部车体上搭载的某些传感器会有帮助。

图6 履带运动
2.3典型越障过程
机器人履带摆臂可360°摆动,机器人在越障过程中具备丰富的运动姿态变化,其典型的越障过程如图7所示。

图7 典型越障过程
3越障能力分析
3.1质心
机器人质心位置如图8所示。

图8 机器人质心图
在履带摆臂的转轴上建立笛卡尔坐标系o1x1y1z1与o2x2y2z2,坐标系o1x1y1z1固连到中部车体上,坐标系o2x2y2z2固连到右侧的履带摆臂上。P1(x1,y1,z1)为中部车体的质心,P2(x2,y2,z2)分别为前后履带摆臂的质心,P*(x*,y*,z*)为整个机器人的质心。θ1、θ2分别为两侧履带摆臂相对于中部车体的摆角,l为摆臂转轴到摆臂质心点的距离,L为摆臂转轴间的距离。机器人质心点P*在坐标系o1x1y1z1中的坐标为:
(1)
M=(m1+2·m2)

假设固定右侧摆臂,即保持θ2不变,由式(1)可得机器人质心坐标x*、y*的关系如下:
(2)
由式(2)可知,机器人的质心位于半径为m2·l/M的圆盘内,所以在满足摆臂长度与承载能力的条件下,应尽量减小摆臂质量m2以及摆臂质心到转轴的距离l,以减小机器人质心的变化范围,提高运动的稳定性。
3.2越障能力
机器人越障能力定义为其刚好能够翻越的垂直障碍的高度,如图9所示。翻越垂壁的前提是质心铅垂线在最大可能的直立过程中超越垂壁棱,以致机器人可沿垂壁棱翻转[10]。
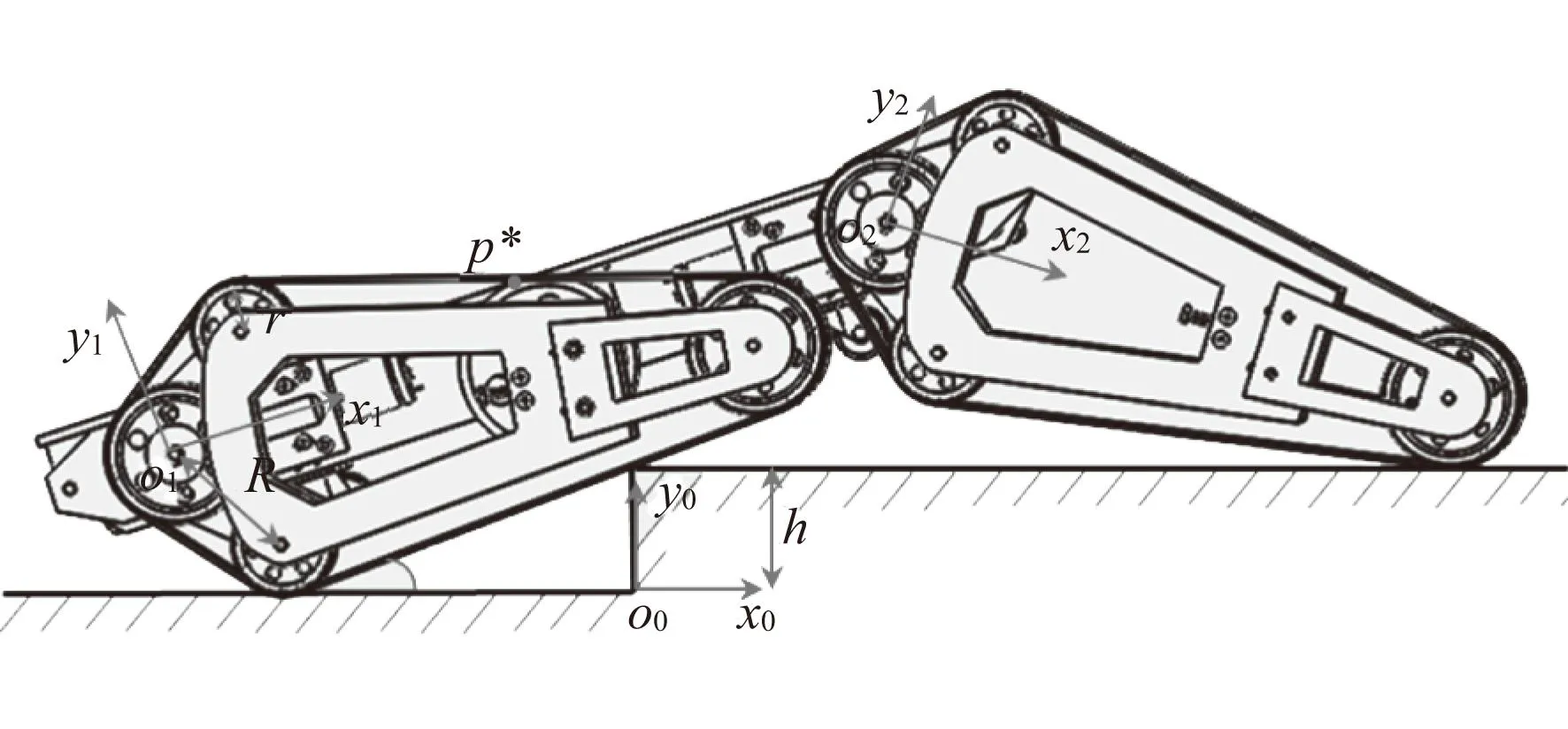
图9 机器人越障图
坐标系o0x0y0z0为固定在地面上的基坐标系,P*在基坐标系中的坐标为(x,y,z)。主动轮轮心与小带轮轮心的间距为R,小带轮半径为r,坐标系o1x1y1z1相对于基坐标系的转角为θ。机器人在越障过程中有式(3)成立:
(3)
由式(3)可知机器人的几何参数固定后,质心点P*的坐标为h与θ的函数,即对应于不同高度的障碍物,机器人越障时质心在基坐标系o0x0y0z0中会有不同的轨迹。取m1=12kg,m2=3kg,L=380mm,l=95mm,x1=190mm,y1=5mm,R=70mm,r=27.5mm,θ1=-10°,θ2=-35°。由于结构的限制,转角θ最大为60°。做出当机器人翻越不同高度障碍物时,质心点在基坐标系中的轨迹如图10(a)所示,图中x轴、y轴分别代表质心在基坐标系中x0轴与y0轴上的位置,h轴代表机器人面对的不同障碍高度。
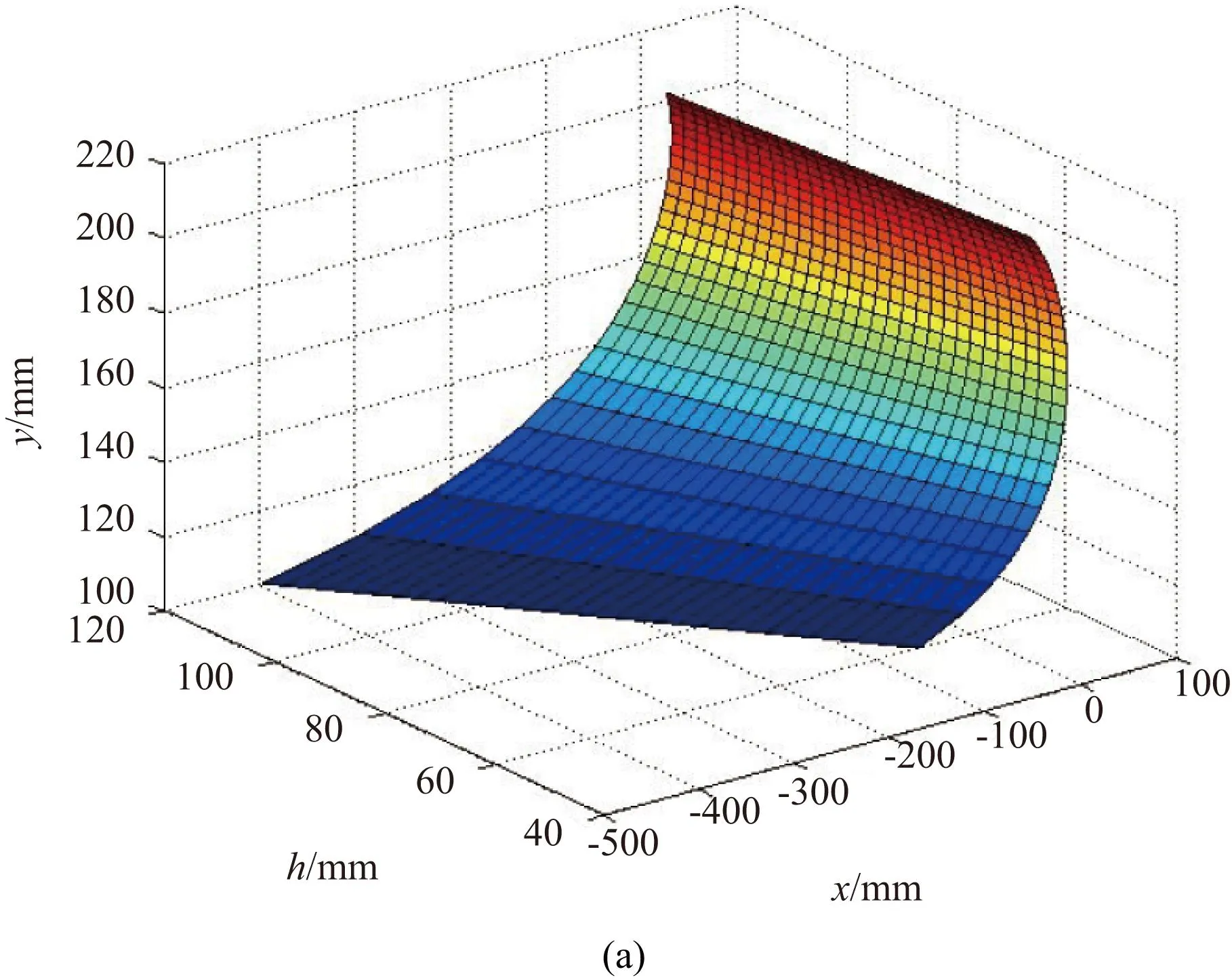
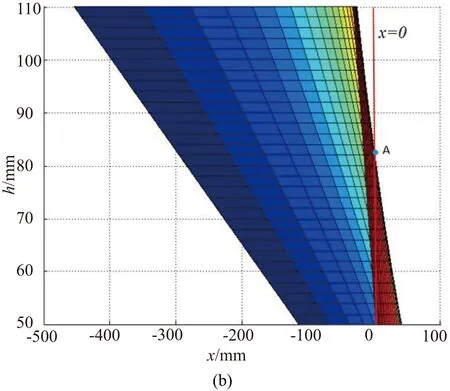
图10 翻越不同高度障碍时机器人质心轨迹
若机器人在翻越某一高度障碍时,质心轨迹能够越过x=0平面,那么机器人便具有越过此高度障碍的能力。由图10(b)(翻越不同高度越障时机器人质心轨迹俯视图)可以看到,只有障碍高度h位于A点以下时,质心轨迹可以超越x=0平面。A点对应h轴上的坐标为81.947,由此可知此时机器人的越障能力为81.947mm。
4实验
完成了机器人的样机制作后,进行了轮式、履带等运动模式在不同路况下的运动试验、转向实验以及越障实验。图11中机器人能越过76mm的台阶。实验表明,机器人在室内以及野外的非结构环境中具有良好的运动特性,也验证了上述机器人越障性能的分析结果。
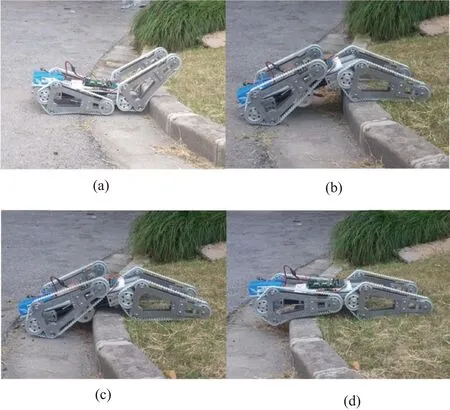
图11 机器人越障性能试验
5结语
设计了一种既能在室内良好环境又能在野外复杂环境中具有良好通过性能的轮履混合移动机器人。该机器人具有轮式或履带式两种运动模式,可以在纯轮式运动与纯履带式运动间切换。与同类机器人相比,具有体积小、结构紧凑、能量效率高等特点,一系列实验也验证了该机器人具有良好的环境适应能力和越障能力,在侦查、探测等领域拥有广阔的应用前景。
参考文献:
[1] 朱磊磊, 陈军. 轮式移动机器人研究综述[J]. 机床与液压, 2009, 37(8): 242-247.
[2] Chopra A, Obsniuk M, Jenkin M R. The Nomad 200 and the Nomad SuperScout: Reverse engineered and resurrected[C]//Computer and Robot Vision, 2006. The 3rd Canadian Conference on. IEEE, 2006: 55-55.
[3] Dian S, Liu T, Liang Y, et al. A novel shrimp rover-based mobile robot for monitoring tunnel power cables[C]//Mechatronics and Automation (ICMA), 2011 International Conference on. IEEE, 2011: 887-892.
[4] Szynkarczyk P, Czupryniak R, Trojnacki M, et al. Current State and Development Tendency in Mobile Robots for Special Applications[C]//Proceedings of the International Conference WEISIC. 2008,(8): 30-41.
[5] Vu Q H, Kim B S, Song J B. Autonomous stair climbing algorithm for a small four-tracked robot[C]//Control, Automation and Systems, 2008. ICCAS 2008. International Conference on. IEEE, 2008: 2356-2360.
[6] Edlinger R, Pölzleithner A, Zauner M. Mechanical Design and System Architecture of a Tracked Vehicle Robot for Urban Search and Rescue Operations[M]//Research and Education in Robotics-EUROBOT 2010. SpringerBerlin Heidelberg, 2011: 46-56.
[7] Hoover A M, Burden S, Fu X Y, et al. Bio-inspired design and dynamic maneuverability of a minimally actuated six-legged robot[C]//Biomedical Robotics and Biomechatronics (BioRob), 2010 3rd IEEE RAS and EMBS International Conference on. IEEE, 2010: 869-876.
[8] Wang Z, Ding X, Rovetta A, et al. Mobility analysis of the typical gait of a radial symmetrical six-legged robot[J]. Mechatronics, 2011, 21(7): 1133-1146.
[9] 司跃元. 轮履复合机器人的机械结构设计及特性分析[D]. 天津:天津理工大学,2013.
[10] W. Merhop, E. M. Hackbarth. 履带车辆行驶力学[M]. 韩雪海,刘侃,周玉珑,等译. 北京:国防工业出版社, 1989.


收稿日期:2014-01-13
中图分类号:TP242
文献标志码:B
文章编号:1671-5276(2015)04-0152-05
作者简介:吕海洋(1989-),男,山东临沂人,硕士研究生,研究方向:履带机器人。
基金项目:国家自然科学基金资助项目(51075272)
