异步电动机间接矢量控制系统的仿真研究
2016-01-29石瑶李宏胜
石瑶,李宏胜
(南京工程学院 自动化学院, 江苏 南京 211167)
异步电动机间接矢量控制系统的仿真研究
石瑶,李宏胜
(南京工程学院 自动化学院, 江苏 南京 211167)
摘要:异步电动机的转子磁链开环间接矢量控制系统因其结构简单,控制性能高得到广泛的应用。利用Matlab/simulink仿真软件建立了间接定向的矢量控制系统,并根据模型探讨转子时间常数的变化对转子磁链定向的影响。结果表明,转子时间常数的实时调整对系统控制性能有重要作用。
关键词:异步电动机;间接定向;转子时间常数;转子磁链
Simulation of Indirect Vector Control System of the Asynchronous Motor
SHI Yao, LI Hongsheng
(School of Automation and Nanjing Institute of Technology, Nanjing 211167, China)
Abstract:The indirect vector control system of the AC motor with rotor flux open-loop has been widely used because of the simple structure and high control performance. The indirect oriented vector control system was established based on Matlab/simulink. Then it was a research if the changes of the rotor time constant had effect on the rotor flux oriented. The results showed that the real-time adjustment of the rotor time constant had an important role in the system control performance.
Keywords:AC motor; indirect orientation; rotor time constant; rotor flux
0引言
在工农业生产中,交流异步电动机因结构简单、造价低廉、坚固耐用、事故率低、维护简单,有着广泛的应用。但是,由于异步电动机是一个高阶、多变量、非线性、强耦合的对象,实时控制中存在严重的外部干扰、参数变化和非线性不确定因素,实现基于精确电动机参数的完全解耦比较困难,影响了其动态性能,因此,如何提高异步电动机的控制性能成为一个热点。
在转子磁链闭环控制的矢量控制中,磁链观测模型受到电动机参数Tr和Lm变化的影响,造成控制的不准确。既然如此,不如利用矢量控制方程中的转差公式,构成转差型磁链开环矢量控制系统,也称间接矢量控制系统,系统结构会简单许多[1-3]。
间接矢量控制系统的磁场定向由电流励磁分量和转矩分量给定信号确定,靠矢量控制方程保证,由于矢量控制方程中仍然含有电动机转子参数,转子磁场定向的精度还是受到参数变化的影响。文中探讨了异步电动机在运行过程中,转子时间常数的变化对转子磁链定向的影响。
1异步电动机的数学模型
在两相坐标系dq下,使用状态方程对异步电动机进行动态数学建模,选取转速ω、定子电流is和转子磁链ψr作为状态变量,其状态方程[4]如:
运动方程式为:

(1)
磁链方程为:

(2)

(3)
电流方程为:

(4)

(5)
电磁转矩方程为:

(6)
令ω1=0,旋转坐标系转化为静止两相坐标系,将dq换为αβ,即得到静止两相坐标系αβ中的状态方程。
2间接定向矢量控制系统控制方案
定义dq坐标系与转子磁链矢量旋转同步,同时令d轴与转子磁链矢量重合,得到按转子磁链定向同步旋转坐标系mt,则ψrm=ψrd=ψr,ψrt=ψrq=0,保证ψr不变,代入上述状态方程,整理得[5]:

(7)
(8)
(9)
其中,p为微分算子。
利用转差公式(7)建立间接定向的矢量控制系统。将转差频率给定信号ωs加上实际转速ω,得到坐标系的旋转角速度,再经积分环节,产生了矢量变换角,即为定子输入电压矢量的相位,由此实现了转差频率控制功能。式(7)中转子磁链的给定信号由定子电流励磁分量通过式(9)获得。
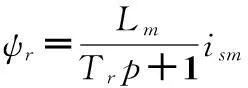
使用异步电动机在静止两相坐标系αβ中的状态方程建立电动机模型。根据间接矢量控制系统控制方案,建立间接矢量控制系统各模块及Matlab/simulink仿真模型如图1所示。异步电动机的仿真参数为:Rs=11.05Ω;Rr=6.11Ω;Ls=0.3164H;Lr=0.3164H;Lm=0.2939H;J=0.003kg·m2;p=4;PN=0.25×746W;fN=50Hz。
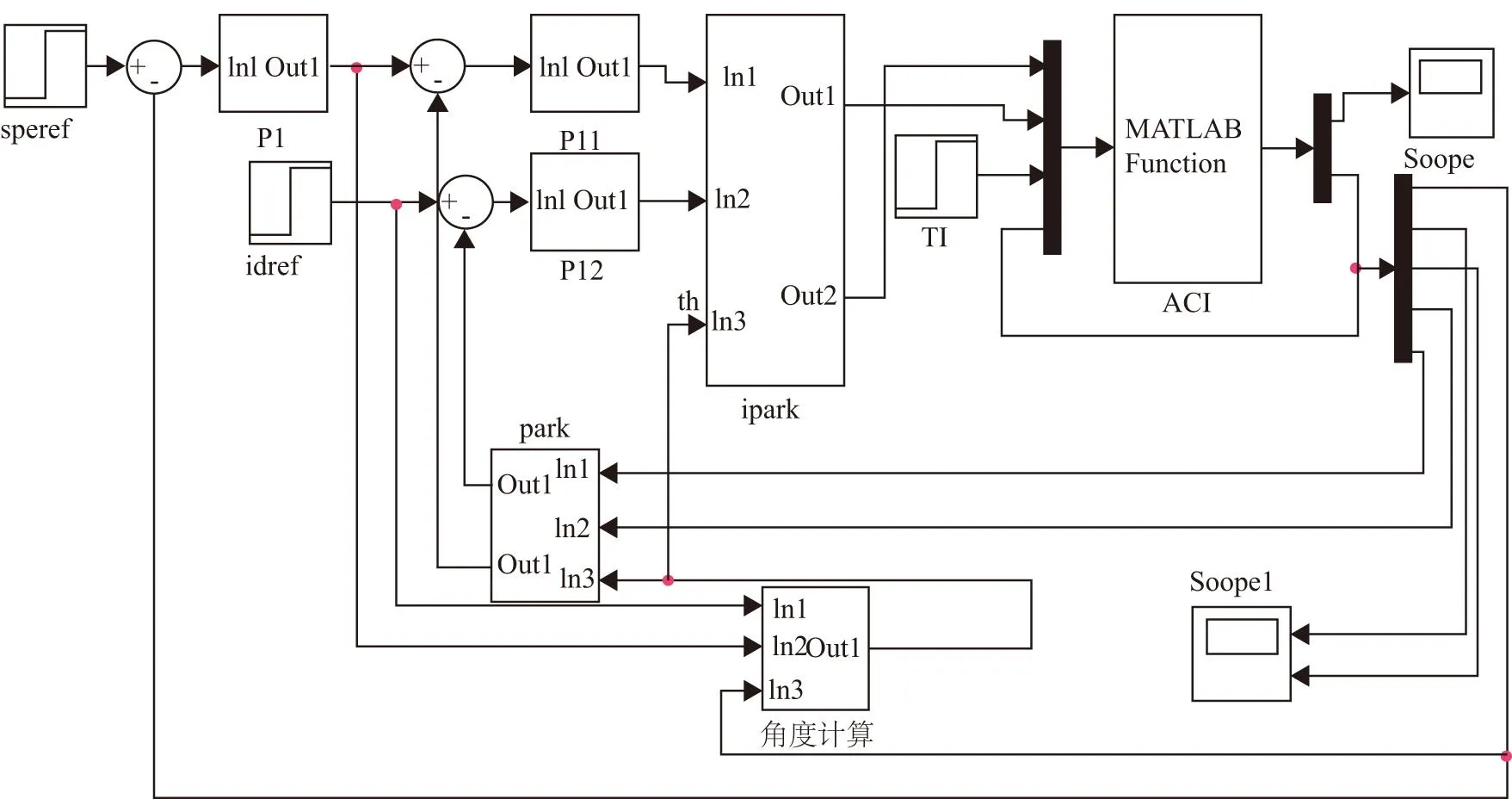
图1 仿真模型图
3仿真研究
由间接矢量控制方程可知,转矩方程和磁链方程的建立均依赖于准确的电动机参数,在电动机运行过程中,由于电动机自身和外部环境的影响,电动机的参数必然会发生变化,这将导致电动机的输出性能变差。这里主要讨论转子时间常数Tr失调对转子磁链角造成的影响。
采用对比的方法,将转子时间常数失调与不失调两种情况分别进行仿真。首先,电动机实际转子时间常数的数值分别设定为0.95Tr、0.85Tr、0.75Tr、0.65Tr,其他模块的转子时间常数与实际值保持一致,观测此时的磁链角。然后,将参与实际计算的转子时间常数设定为Tr,观测此时的磁链角,图2-图5中所示各组曲线为对应磁链角的弧度值,实线为转子时间常数计算值和实际值一致时的磁链角,虚线为转子时间常数计算值和实际值不一致时的磁链角。由图可知,当Tr失调时,磁链角出现了一定的偏差[6]。
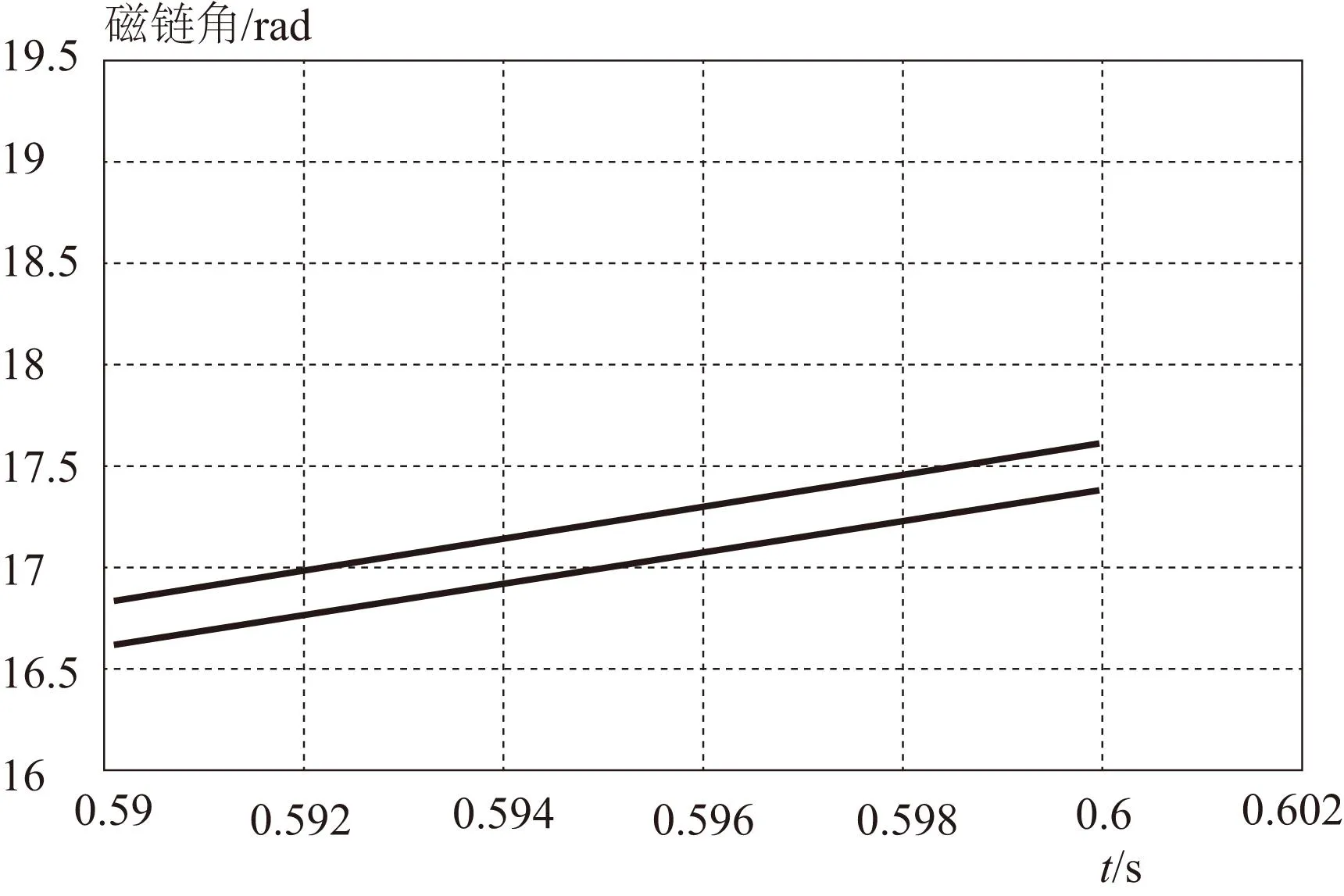
图2 转子时间常数实际值为0.95Tr
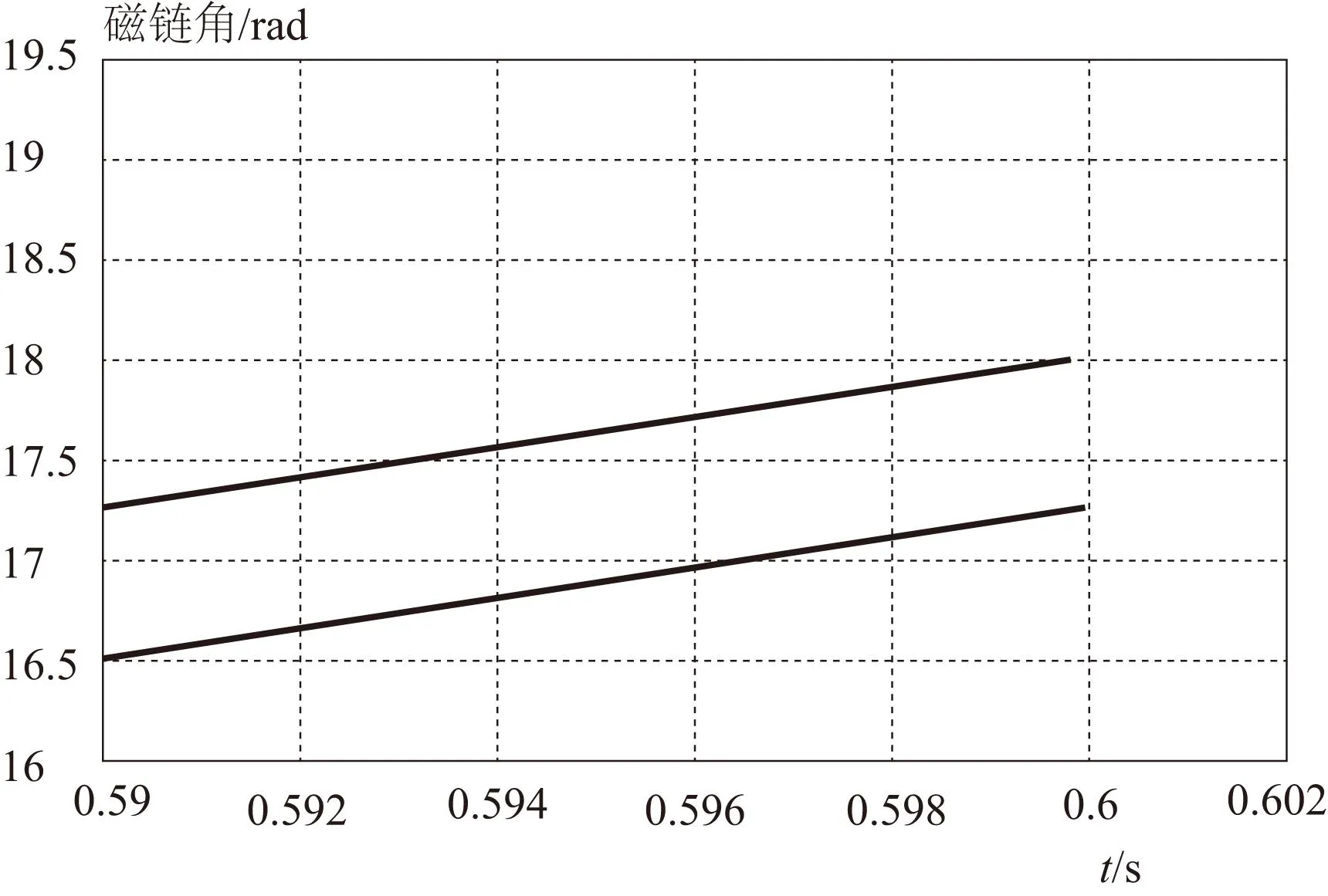
图3 转子时间常数实际值为0.85Tr
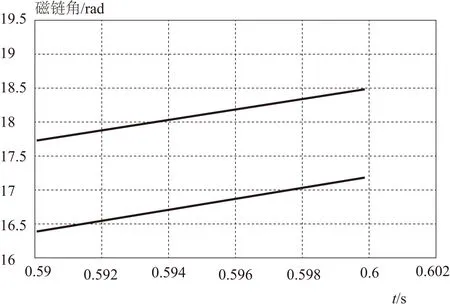
图4 转子时间常数实际值为0.75Tr

图5 转子时间常数实际值为0.65Tr
图2中两条波形曲线相位相差0.2284rad,转换成角度为13.09°;图3中两条波形曲线相位相差0.7337rad,转换成角度为42.04°;图4中两条波形曲线相位相差1.29rad,转换成角度为73.91°;图5中两条波形曲线相位相差1.934rad,转换成角度为110.81°。
上述可知,当Tr失调时,磁链定向角出现偏差。随着转子时间常数变化率的增加,即转子时间常数的计算值与实际值的偏差越来越大,磁链定向角的偏差越来越大,当变化率>5%时,计算得到的磁偏角就会使dq坐标系有很大的偏差,严重影响磁链的准确定位,影响系统的整体性能。
4结语
间接矢量控制系统一方面继承了基于稳态型转差频率控制系统的优点,另一方面,利用基于动态模型的矢量控制规律克服了它大部分的不足,这种控制方式由于磁链开环,不需要实时计算转子磁链的幅值,其磁场定向由定子电流给定信号确定,控制结构简单,降低了系统对转子时间常数的依赖性。从上面仿真结果能够看出,在电动机运行过程中,转子时间常数变化率越大,计算得到的转差角与实际的转差角的偏差就越大,这对系统的整体性能有着很严重的影响。因此,在实际系统运行过程中,需要对控制系统的转子时间常数作实时调整,这将会最大限度地提升系统控制性能。
参考文献:
[1] 朱军,朱政. 转差频率矢量控制的电机调速系统设计与研究[J]. 现代电子技术,2010,(20):331.
[2] 何伟. 异步电机矢量控制的检测及参数辨识[D]. 南昌:南昌大学学报,2013.
[3] 李畸勇. 基于DPS的间接矢量控制系统的研究[D]. 成都:西南交通大学学报,2002.
[4] 阮毅,陈维钧. 运动控制系统[M]. 北京:清华大学出版社,2006.
[5] 周渊深,陈涛,朱希荣. 电力拖动自动化控制系统[M]. 北京:机械工业出版社,2013.
[6] 翟淑惠. 带电机参数辨识的异步电机矢量控制系统研究[D]. 成都:西南交通大学学报,2011.


收稿日期:2014-06-10
中图分类号:TM346+.2;TP391.9
文献标志码:B
文章编号:1671-5276(2015)04-0088-03
作者简介:石瑶(1990-),男,江苏邳州人,硕士研究生,研究方向为先进数控技术与装备。
