基于分裂基FFT的L1辅助L2C双频GPS信号快速捕获
2016-01-27曾庆喜唐琳琳黄玉划
曾庆喜, 唐琳琳, 裴 凌, 黄玉划, 徐 亮
(1. 南京航空航天大学车辆电子实验室, 江苏 南京 210016;
2. 上海交通大学北斗导航与位置服务上海市重点实验室, 上海 200240;
3. 南京航空航天大学计算机科学与技术学院, 江苏 南京 210016)
基于分裂基FFT的L1辅助L2C双频GPS信号快速捕获
曾庆喜1, 唐琳琳1, 裴凌2, 黄玉划3, 徐亮1
(1. 南京航空航天大学车辆电子实验室, 江苏 南京 210016;
2. 上海交通大学北斗导航与位置服务上海市重点实验室, 上海 200240;
3. 南京航空航天大学计算机科学与技术学院, 江苏 南京 210016)
摘要:室外无人搬运车(automatic guided vehicle, AGV)运输和未来的无人驾驶智能汽车等对全球定位系统(global positioning system, GPS)高精度定位精度要求较高,GPS L1/L2C双频信号可以校正电离层误差从而提高GPS单机的定位精度。但L2C 民用中码/民用长码(civil moderate/civil long code, CM/CL)的长度远大于L1 粗捕获码(coarse/acquisition code, C/A),传统的捕获算法直接用于L2C信号会使捕获时间延长甚至导致捕获失效。对此,提出了利用捕获到的L1信号的多普勒频移和C/A码相位对L2 CM码进行辅助捕获,然后利用CM码码相位对CL码进行辅助捕获的方法,减小了L2C信号捕获的二维搜索范围;同时在相关运算中利用分裂基快速傅里叶变换(split-radix fast Fourier transform, SFFT)代替传统的基2 FFT进一步降低了计算量。仿真结果表明,所提算法在运算量明显降低的情况下可以实现对L1/L2C双频信号的精确捕获。
关键词:L1/L2C双频GPS信号; 快速捕获; 分裂基快速傅里叶变换; 辅助捕获
0引言
目前,车辆导航普遍使用全球定位系统(global positioning system, GPS)进行定位导航,然而随着特种车辆技术的不断发展,用户开始要求高精度无盲区的GPS定位技术,尤其对于室外作业的自动导引车(automatic guide vehicle, AGV)和未来的无人驾驶智能汽车等对定位精度的要求更高。目前,广泛采用差分GPS技术来消除系统固有的卫星、星历、电离层和对流层误差进而提高定位精度。但是,差分GPS技术需要通过建立多个基准站与接收机进行实时通信来实现,系统结构复杂,成本较高;而且差分GPS无法解决在隧道、城市峡谷等受遮挡环境下GPS信号强度急剧下降可能导致的定位失效问题。GPS现代化计划在L2波段增加了新的民用L2C信号,和L1信号相比,L2C信号具有的较低的载波跟踪门限和数据解调门限,使其更适合在信号较弱的复杂环境下使用[1],同时,L1/L2C双频信号还可以有效校正电离层延迟误差来提高GPS单机的定位精度[2]。因此,L1/L2C双频GPS接收机是实现车辆高精度导航的关键技术之一。
软件接收机利用软件方法和少量硬件对GPS信号进行接收处理,和传统的硬件接收机相比成本低,开发速度快,具有高度的可配置性和灵活性。GPS软件接收机要实现对双频GPS信号的跟踪,首先要实现对L1 粗捕获(coarse/acquisition, C/A)码和L2C民用中(civil moderate,CM)码或民用长(civil long, CL)码的捕获。然而CM码和CL码的长度分别是C/A码的10倍和750倍,如果采用传统的的捕获算法直接对CM码和CL码进行捕获,所需要的运算量和存储空间都非常大,无法在软件接收机上实现[3-5]。因此需要研究针对L2C信号结构的快速捕获算法。文献[1]证明了L1信号和L2C信号在多普勒频移和码相位上的相关和同步关系,为L1辅助L2C捕获算法的实现奠定了理论基础。文献[6]分析了分裂基快速傅里叶变换(split-radix fast Fourier transform, SFFT)相比基2 FFT在减少GPS捕获计算量上的优势。本文将L1辅助L2C捕获算法和SFFT算法相结合,在不损失捕获性能的前提下,有效地减小L2C信号捕获的计算量,有利于高性能L1/L2C双频软件接收机的实现。
1L1/L2C 双频信号特征
L2C 伪随机噪声(pseudo-random noise, PRN)码包含两种扩频码——CM码和CL码,其中,CM码的周期为20 ms,码长为10 230个码片,且调制有50 Hz的导航电文;CL码的周期为1.5 s,码长为767 250个码片,无导航电文调制。L2C PRN码是CM码和CL码通过逐片分时复用的方式形成的,如图1所示[7-8]。
将上述调制导航电文后形成的L2C PRN码调制在频率为1 227.60 MHz的载波上就形成了L2C信号。L1信号和L2C信号的特征参数如表1所示[9]。

图1 L2C PRN码的结构
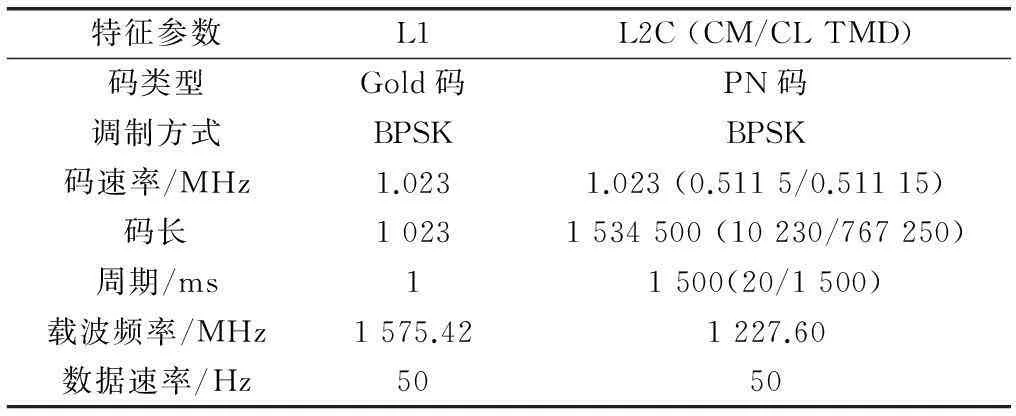
特征参数L1L2C(CM/CLTMD)码类型Gold码PN码调制方式BPSKBPSK码速率/MHz1.0231.023(0.5115/0.51115)码长10231534500(10230/767250)周期/ms11500(20/1500)载波频率/MHz1575.421227.60数据速率/Hz5050
此外,由于发射自同一颗卫星的L1 C/A码和L2C信号的产生基于同一个原子钟生成的时钟,因此接收机捕获到的L1 C/A码信号和L2C信号的码初始相位和多普勒频率具有相关性。文献[1]证明了:①在接收到的双频信号中L1 C/A码延迟与L2 CM码延迟相同;②Ll信号和L2C信号的多普勒频移之比等于Ll信号和L2C信号的载波频率之比[10],即
(1)
式中,fcarrier_L1和fcarrier_L2分别代表L1和L2信号的载波频率;fdoppler_L1和fdoppler_L2分别代表L1和L2C信号的多普勒频移。
2基于SFFT的L1辅助L2C双频信号快速捕获
设天线接收到的GPS双频信号被混频到中频并进行采样之后的数字中频信号表示为[11]
(2)
式中,A1和A2分别表示L1和L2C信号的载波幅值;tk表示采样时刻;ts表示C/A码、CM码和CL码的起始时刻;ωIF1和ωIF2分别表示L1和L2C信号的载波中频频率;ωd1和ωd2分别表示L1和L2C信号的载波多普勒频移;φ1和φ2分别表示L1和L2C信号的载波初始相位;vk表示高斯白噪声。
2.1传统的捕获算法
信号捕获的目的就是通过计算接收信号和本地复现信号的相关值来估计码相位tk和载波多普勒频移ωd[12]。因此,对某种伪码信号进行捕获时需要预先生成该伪码的本地复现信号,设本地的复制码信号为
(3)

接收到的数字中频信号和本地复制码信号的相关输出函数可以表示为
(4)
其中同相和正交支路的相关积分为
(5)
(6)
式中,N为一个积分周期内的采样点。
捕获判决函数可以表示为
(7)
长度为N的有限长序列x(n)和y(n)傅里叶变换的结果为X(k)和Y(k):
(8)
长度为N的有限长序列x(n)和y(n)的互相关结果为z(n):

(9)
对相关结果z(n)进行傅里叶变换得:
(10)
式中,X*(k)表示X(k)的复共轭。
式(10)得到的是输入信号和本地复现信号的频域相关结果,对该结果求逆傅里叶变换就可以得到需要的时域相关结果。
2.2L1信号捕获
传统的基于FFT循环相关的信号捕获算法原理如图2所示。对于L1信号的捕获采用如图2所示的传统的并行码相位搜索捕获算法。但为了减少计算量,采用SFFT代替传统的基-2FFT算法实现图2中的FFT计算。

图2 传统的基于FFT循环相关的捕获原理
2.3L1 C/A码辅助L2 CM码捕获
根据文献[1]所证明的L1 C/A码和L2 CM码之间码相位的同步关系以及这两个测距码码长之间的关系,如果捕获到的C/A码的码相位为nC/A,CM码的码相位nCM只有20种可能,如图3所示,即nCM=nC/A+(i-1)×N,i=1,2,…,20,其中N表示1 ms内的采样点数。

图3 C/A码与CM码之间的相位关系
基于SFFT的L1 C/A码辅助L2 CM码捕获的原理图如图4所示。

图4 L1 C/A码辅助CM码捕获原理图
捕获算法可描述为以下步骤:
步骤 1完成L1信号的捕获后得到C/A的码相位nC/A和L1载波多普勒频移ωd1,根据公式(1)得到L2信号的多普勒频率ωd2,根据ωd2产生本地L2C载波信号x=e[-j×(ωIF2+ωd2)tk]。
步骤 2输入信号和本地产生的L2C载波信号相乘,相乘结果记为y。取y中分别以nC/A+(i-1)×N(i=1,2,…,20)为起点的20段数据,每段数据长度为1 ms,然后对每一段分别做SFFT,具体实现过程如下:
(11)
式中,N为1 ms内的采样点数。
步骤 3产生一个周期(20 ms)的本地归零CM码,然后取第1 ms的CM码片段,对这个1 ms长的CM码片段求SFFT,具体过程表示为:
(12)
步骤 4对步骤2产生的20个SFFT结果和步骤3产生的本地归零CM码的SFFT结果分别求SIFFT得到最终的相关结果,具体过程如下:
(13)
步骤 5计算得出L2C CM码的码相位。
理论上,在步骤4得到的20组相关结果中只有1组会出现明显的相关峰值,这一组即为CM码相位所在的位置。相关峰值位于第k组,那么CM码的码相位为nCM=nC/A+(k-1)×N,N为1 ms内的采样点。
2.4CM码辅助CL码捕获
根据CM码和CL码码片时分复用的特点,CM码捕获成功后,CL码的起始相位nCL共有75种可能,如图5所示,即
CL码的捕获原理和CM码相同,首先取输入信号和L2C本地载波相乘的结果的前1.5 s,并将其平均分为75个长度为20 ms的片段,每个片段的起始点分别为nCM+(i-1)×20N(i=1,2,…,75),然后分别和本地归零CL码进行相关运算,根据相关结果得到CL码的码相位。

图5 CM码与CL码的相位关系
3计算复杂度
计算复杂度是评价捕获算法性能的一个重要指标[15],如前所述,CL码的辅助捕获原理和过程与CM码的辅助捕获基本相同,所以接下来以CM的捕获为例具体分析由L1 C/A码的辅助和SFFT的运用,本文所提出的CM码的捕获算法和传统的直接进行CM码的捕获相比所带来的捕获运算量的变化。
传统的CM码直接捕获算法就是如图2所示的并行码相位捕获算法,需要说明的是CM码捕获所需要的输入信号和本地CM码的长度为20 ms。L1辅助L2C捕获算法将L2C信号捕获所需要的二维搜索转化为对CM码相位的一维搜索,如图6所示。

图6 优化的CM码捕获搜索示意图
根据文献[12],假设L1载波多普勒频移的搜索范围为[-10 kHz,+10 kHz],根据式(1),L2C信号的载波多普勒频率搜索范围应该为[-7.8 kHz,+7.8 kHz],且L2 CM的载波多普勒频移的搜索步长应为50 Hz[12],所以CM码的直捕需要在7.8×2 kHz/50 Hz=312个频率分量上进行搜索。基于基-2FFT的传统的CM码直接捕获算法和C/A码辅助的CM码捕获算法的计算量如表2所示和图7(a)所示。

表2 CM码直接捕获算法和辅助捕获算法的计算复杂度
由图7(a)可以明显看出,由于L1 C/A的辅助,L2 CM码捕获的运算量明显减少,计算复杂度明显降低。
图7(b)为SFFT和基2FFT乘法运算量的对比(基2 FFT和SFFT的加法运算量相同),如果使用 SFFT代替上述辅助算法中的基2FFT,可以进一步减少了相关过程中傅里叶变换和傅里叶逆变换的计算量进而减少总的计算量。
综上所述,本文所提出的L2C CM码捕获算法通过将C/A码辅助捕获算法和SFFT算法结合,使其明显降低了计算量,缩短了捕获时间。由于CL码的捕获过程和CM码类似,所以本文不再详细论述。

图7 CM码直接捕获算法和辅助捕获算法的计算复杂度
4仿真分析
为了对本文所提出的算法进行验证,本文仿真了一个1号卫星的L1/L2C双频信号源。信号源的参数设置如下:L1频段的中频为1.5 MHz,多普勒频移为2 kHz,采样频率为4.096 MHz,C/A码的码相位为1 500;L2频段的中频为2 MHz,多普勒频移为1.56 kHz,采样频率为4.096 MHz,CM码的码相位为26 076,CL码的码相位为1 664 476。
图8为L1信号的捕获结果,最大相关峰值对应的多普勒频率和C/A码码相位分别为2 kHz和1500,和信号源中的设置相符合,即捕获成功。

图8 L1 信号的捕获结果
L1信号捕获成功后,根据第2.2节所介绍的L1 C/A码辅助CM码捕获算法对CM码进行捕获,捕获结果如图9所示。
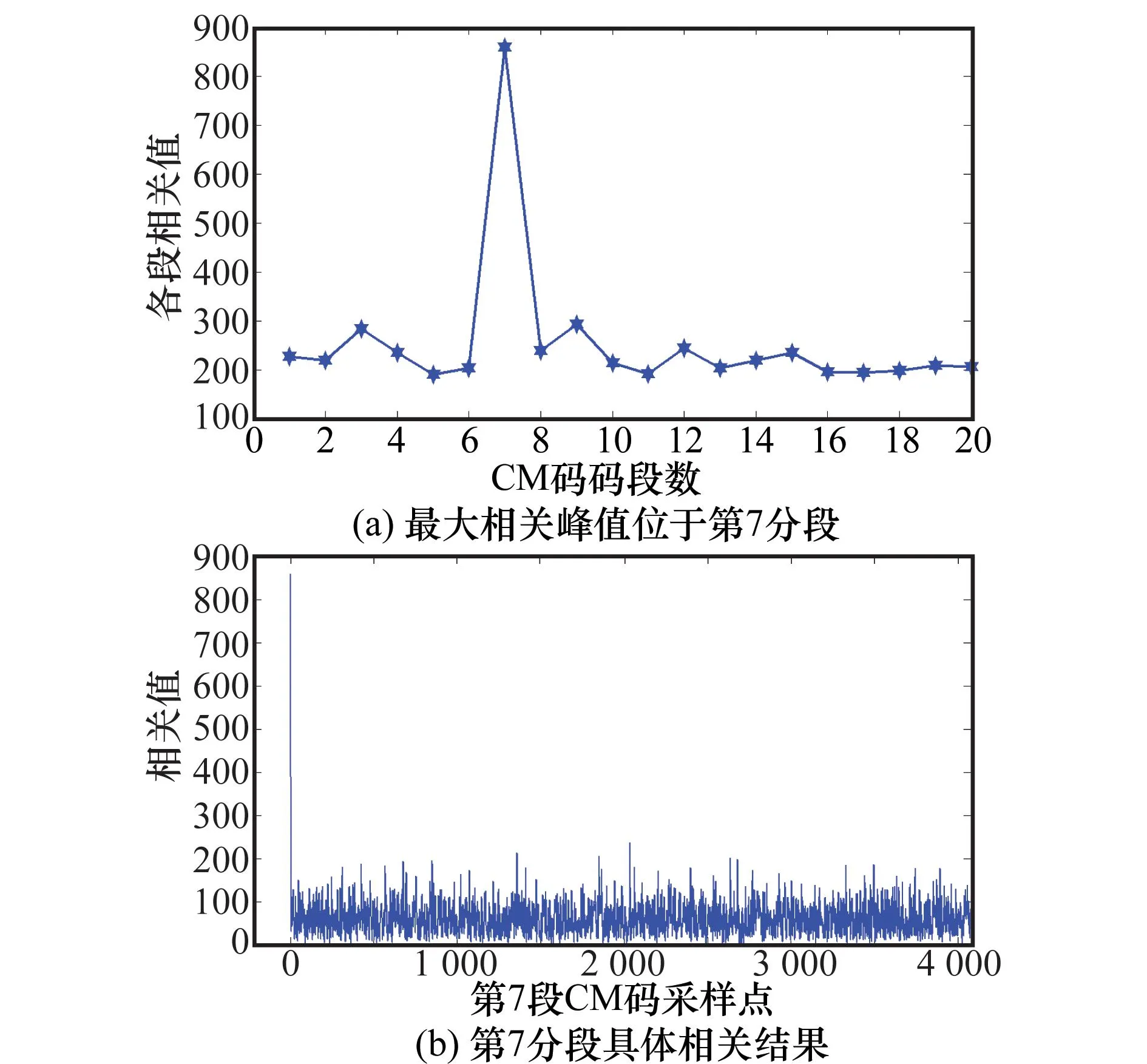
图9 基于SFFT的C/A码辅助CM码捕获结果
由图9(a)可以看出,相关峰值位于CM码的第7个分段上,可以得出CM码的相位为nCM=1 500+6*4 096=26 076。因此,CM码的捕获结果符合信号源中对CM码码相位的设置。图9(b)所示的是CM码第7个分段的相关结果,相关峰值之所以位于第1个采样点处,原因是第2.2节中本地CM码的分段方式使得第7段的本地CM码已经和输入信号对齐,因此相关峰值位于第1个采样点。
和CM码的捕获类似,根据2.4节CM码辅助CL码捕获的算法,CL码捕获结果如图10所示,相关峰值位于第21段,可以得出CL码的相位为:nCL=26 076+20*81 920=1 664 476,和信号源设置一致。综上所述,本文所提出的基于 SFFT的L1辅助L2C信号捕获算法达到了较好的捕获效果。

图10 基于SFFT的CM码辅助CL码辅助捕获结果
5结论
L2C信号的出现使得GPS软件接收机能在复杂环境下实现高精度定位,但由于L2C CM/CL码的长度远大于C/A码的长度,所以如果将传统的捕获算法运用于CM/CL码的捕获,所需要的运算时间过长,无法满足定位的要求。针对上述问题,本文根据L1和L2C信号的同步性提出了一种L1辅助L2C的捕获算法,显著减小了捕获搜索范围,同时,通过使用 SFFT算法代替相关运算中传统的基2FFT进一步减少了计算量。最后利用L1/L2C双频信号对本文提出的算法进行了验证,仿真结果表明该算法在运算量明显降低的情况下实现了对L1/L2C双频信号的精确捕获,对L1/L2C双频软件接收机的实现具有参考价值。
参考文献:
[1] Gernot C,Shanmugam S K,Keefe K O,et al. A Novel L1 and L2C combined detection scheme for enhanced GPS acquisition[C]∥Proc.oftheIONGNSS20thInternationalTechnicalMeetingoftheSatelliteDivision,2007:1-12.
[2] Li C J, Lu M Q, Feng Z M,et al. Study on GPS L2C acquisition algorithm and performance analysis[J].JournalofElectronics&InformationTechnology,2010,32(2):296-300.(李成军,陆明泉,冯振明,等. GPS L2C捕获算法研究及性能分析[J].电子与信息学报,2010,32(2):296-300.)
[3] Zeng Q X,Tang L L,Wang Q,et al. Algorithm of GPS L1/L2C fast acquisition based on segmented FFT[J].JournalofChineseInertialTechnology,2013,21(5):640-645.(曾庆喜,唐琳琳,王庆,等.基于分段FFT的GPS L1/L2C信号快速捕获算法[J].中国惯性技术学报,2013,21(5):640-645.)
[4] Kwon K C,Shim D S. Rapid acquisition of CM and CL code for GPS L2C software receivers[J].JournalofElectricalEngineering&Technology,2011,6(5):723-730.
[5] Moghaddam A A,Watson R,Lachapelle G,et al. Exploiting the orthogonality of L2C code delay for a fast acquisition[C]∥Proc.oftheIONGNSS19thInternationalTechnicalMeetingoftheSatelliteDivision,2006:1-9.
[6] Lin W H,Mao W L,Tsao H W. Acquisition of GPS software receiver using split-radix FFT[C]∥Proc.oftheIEEEInternationalConferenceonSystem,2006:4608-4613.
[7] Kwon K C,Shim D S. Fast acquisition method for GPS L1/L2C software receivers[C]∥Proc.ofthe11thInternationalConferenceonControl,AutomaticsandSystems,2011:1612-1615.
[8] Qaisar S U,Dempster A. Assessment of the GPS L2C code structure for efficient signal acquisition[J].IEEETrans.onAerospaceandElectronicSystems,2012,48(3):1889-1902.
[9] Wang Z, Liu G B. GPS acquisition of L1 C/A and L2C dual-frequency signals[J].CommunicationsTechnology, 2011,44(1): 27-29.(王忠,刘光斌.一种GPS L1 C/A与L2C双频信号的捕获算法[J].通信技术,2011,44(1):27-29.)
[10] Lim D W,Moon S W,Park C,et al. L1/L2CS GPS receiver implementation with fast acquisition scheme[C]∥Proc.ofthePosition,LocationandNavigationSymposium,2006:840-844.
[11] Psiaki M L,Winternitz L,Moreau M. FFT-based acquisition of GPS L2 civilian CM and CL signals[C]∥Proc.oftheION17thInternationalTechnicalMeetingoftheSatelliteDivision,2004: 457-473.
[12] Zhang Y,Qin H L, Jin T. Direct GPS L2C CL code acquisition based on block and folding[J].ElectronicMeasurementTechnology,2010,33(1):35-39.(张骅,秦红磊,金天. 基于分块折叠的GPS L2C CL码直接捕获算法研究[J].电子测量技术,2010,33(1):35-39.)
[13] Tsui J B Y.Fundamentalsofglobalpositioningsystemreceivers:asoftwareapproach[M]. 2nd ed. Hoboken,USA:Wiley,2005:129-155.
[14] Zhao L,Gao S H,Ding J C. Improved acquisition for high dynamic GPS signals based on FFT[J].SystemsEngineeringandElectronics, 2011,33(1):151-156.(赵琳,高帅和,丁继成. 基于FFT的高动态GPS信号捕获算法优化[J].系统工程与电子技术,2011,33(1):151-156.)
[15] Ledvina B M,Psiaki M L,Sheinfeld D J,et al. A real-time GPS civilian L1/L2C software receiver[C]∥Proc.oftheIONGNSS17thInternationalTechnicalMeetingoftheSatelliteDivision,2004:986-1005.
曾庆喜(1980-),男,讲师,博士,主要研究方向为车辆高精度导航。
E-mail:jslyzqx@163.com
唐琳琳(1990-),女,硕士研究生,主要研究方向为车辆高精度导航。
E-mail:tangllin90@126.com
裴凌(1977-),男,研究员,博士,主要研究方向为无线定位、卫星定位与导航、室内外无缝导航与定位。
E-mail:lione.sp@gmail.com
黄玉划(1980-),男,副教授,博士,主要研究方向为数字信号处理、信息安全。
E-mail:hyuhua2k@163.com
徐亮(1990-),男,硕士研究生,主要研究方向为图像导航。
E-mail:1260523490@qq.com

网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20150120.1050.003.html
Fast acquisition of L1 aiding L2C dual-frequency GPS signal based on SFFT
ZENG Qing-xi1, TANG Lin-lin1, PEI Ling2, HUANG Yu-hua3, XU Liang1
(1.VehicleElectronicLaboratory,NanjingUniversityofAeronauticsandAstronautics,Nanjing210016,China;
2.ShanghaiKeyLaboratoryofNavigationandLocationBasedService,ShanghaiJiaoTongUniversity,
Shanghai200240,China; 3.CollegeofComputerScienceandTechnology,Nanjing
UniversityofAeronauticsandAstronautics,Nanjing210016,China)
Abstract:Outdoor automatic guided vehicle (AGV) transportation and future intelligent unmanned vehicles require positioning accuracy high for the global positioning system (GPS), GPS L1/L2C dual-frequency signals can improve the location accuracy by correcting ionospheric delay.However, L2 civil moderate/civil long (CM/CL) codes are both much longer than L1 coarse/acquisition(C/A) codes. If the traditional acquisition algorithm is applied to L2C acquisition directly, it will lead to much longer acquisition time and even failed acquisition. Therefore, an algorithm is proposed, which accomplishes CM acquisition by using the acquired Doppler shift and C/A code phase of L1 signals, then similarly finishes CL acquisition by the CM aided code phase, which makes the two-dimension searching process for L2C acquisition narrow down to searching one dimension code phase with fewer discrete points. Meanwhile, the split-radix fast Fourier transform (SFFT) instead of traditional radix-2 FFT is introduced into correlation operation, which can reduce the calculated quantity further. Simulation results show that the suggested algorithm can achieve accurate acquisition of dual-frequency signals with much lower calculated amount.
Keywords:L1/L2C dual-frequency GPS signal; fast acquisition; split-radix fast Fourier transform(SFFT); aiding acquisition
作者简介:
中图分类号:TN 927.23
文献标志码:A
DOI:10.3969/j.issn.1001-506X.2015.07.26
基金项目:中央高校基本科研业务费专项资金(NS2013016)资助课题
收稿日期:2014-06-19;修回日期:2014-10-22;网络优先出版日期:2015-01-20。
