基于多普勒盲区的低空突防航线规划
2016-01-27汪先超汤子跃朱振波连晓锋
汪先超, 汤子跃, 朱振波, 连晓锋
(1. 空军预警学院信息与通信工程博士后流动站, 湖北 武汉 430019;
2. 空军预警学院三系, 湖北 武汉 430019)
基于多普勒盲区的低空突防航线规划
汪先超1, 汤子跃2, 朱振波2, 连晓锋2
(1. 空军预警学院信息与通信工程博士后流动站, 湖北 武汉 430019;
2. 空军预警学院三系, 湖北 武汉 430019)
摘要:预警机雷达为了完成在地物杂波背景下的目标探测,通常采用脉冲多普勒(pulse Doppler, PD)体制,而多普勒盲区是PD体制雷达的固有问题。在分析地物杂波特性和多普勒盲区形成机理的基础上,提出了一种基于多普勒盲区的低空突防航线规划方法,并给出了固定时间步长的搜索方法对该规划进行求解。沿此航线的战机利用多普勒盲区可实现相对于预警机雷达的“隐身”,而低空飞行又可有效规避地面雷达的探测,因此该航线可以大大提高战机突防的成功率。仿真实验结果验证了本文提出的基于多普勒盲区的低空突防航线规划方法的正确性及有效性。
关键词:预警机雷达; 多普勒盲区; 多普勒速度门限; 突防航线
0引言
预警机是一种大型、全天候、多传感器空中预警与指挥控制飞机,比地面雷达具有更强的低空、超低空探测能力、战场指挥能力和机动能力[1-3]。由于具备强大的情报探测、信息处理和传输能力,可以完成空中巡逻警戒、指挥、控制等多种战役战术功能,已经成为整个综合电子信息系统的一个重要组成部分,在信息化战争中发挥着重大作用;同时,也成为战场上重点被打击目标。
预警机雷达由于架设在高空飞行的载机平台上,其探测低空范围的优越性是地面雷达所无法比拟的。但是,由于预警机雷达采用下视工作方式,面临着比地面雷达更为严重的地物杂波,而且其杂波分布范围广、强度大,尤其在丘陵和山区地带,杂波强度可达60~90 dB。因此,预警机雷达通常采用脉冲多普勒(pulse Doppler, PD)体制,在频域中完成杂波背景下的目标检测[4-6]。
PD处理技术具有很强的抗地物杂波和抗无源干扰的能力,在各种雷达体制中PD体制是反杂波效果最好的。但是多普勒盲区是PD体制雷达的固有问题,很多学者展开了关于在多普勒盲区下目标检测的研究[7-11]。多普勒盲区对于PD体制雷达来说是个弊端,相反对于战机突防来说是一个很好的利用点。开展基于多普勒盲区的突防航线规划的研究,提高战机的突防成功率是一件非常有意义的工作。
在分析地物杂波特性和多普勒盲区形成机理的基础上,对战机的低空突防航线进行规划,并给出了固定时间步长的搜索方法对该规划进行求解。本文提出的基于多普勒盲区的低空突防航线具有两个优点:一是利用多普勒盲区实现相对于预警机雷达的“隐身”;二是利用低空飞行来规避地面雷达的探测。因此,该突防航线可以同时减少被预警机雷达和地面雷达探测到的概率,大大增加战机突防的成功率。
1杂波特性以及多普勒盲区
由于载机平台的运动,主瓣杂波的展宽程度比地面雷达要严重得多,这使得在频域中检测目标的PD体制雷达产生严重的主杂波遮挡,从而形成不可检测的多普勒盲区。
1.1杂波特性

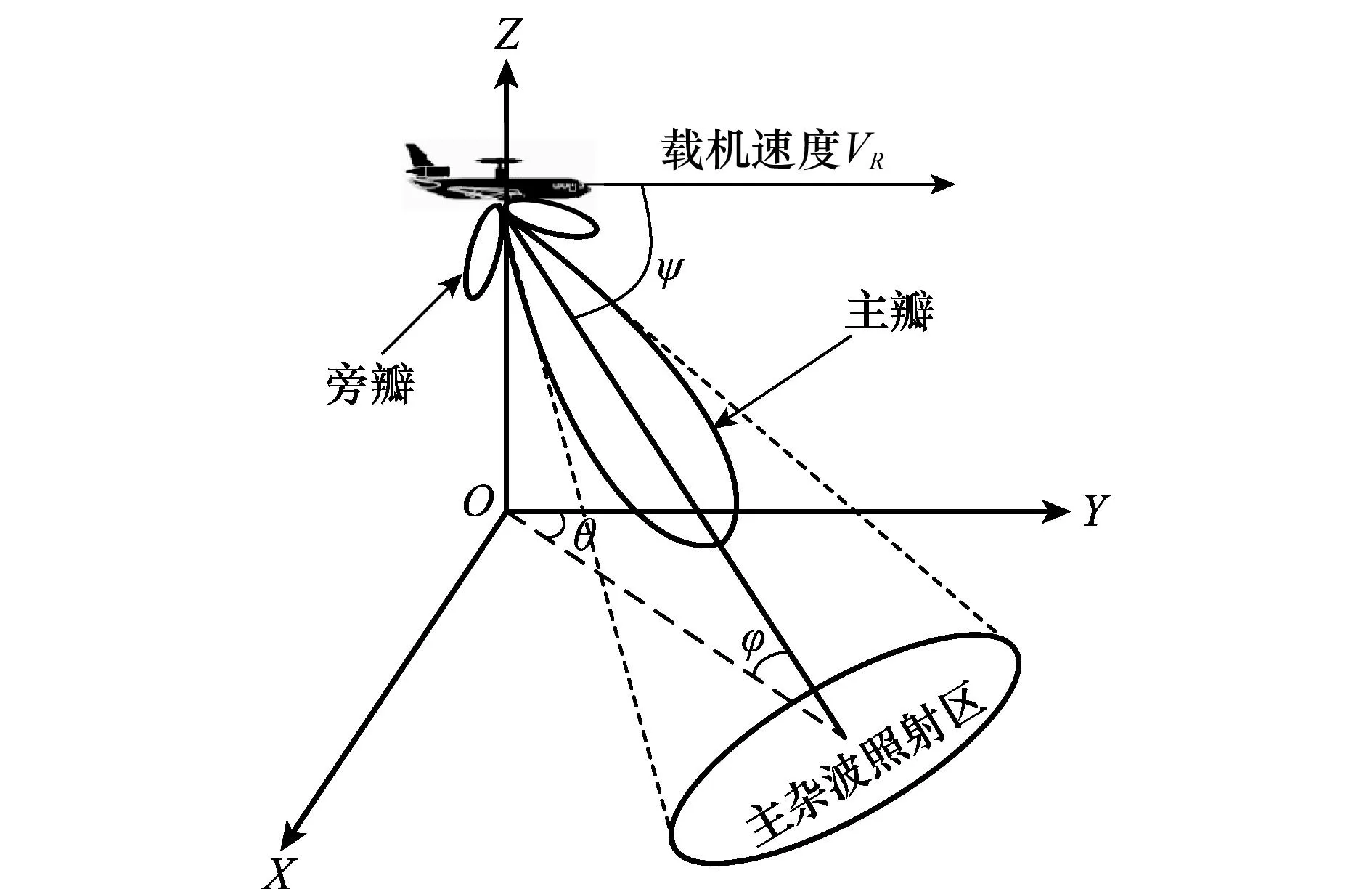
图1 预警机雷达下视时波束与地面的相对关系
图2表示预警机雷达杂波频谱的分布示意图,其中fd0表示主杂波的中心频率。由此可知,预警机雷达的杂波主要包括主瓣杂波、旁瓣杂波和高度线杂波[12]。
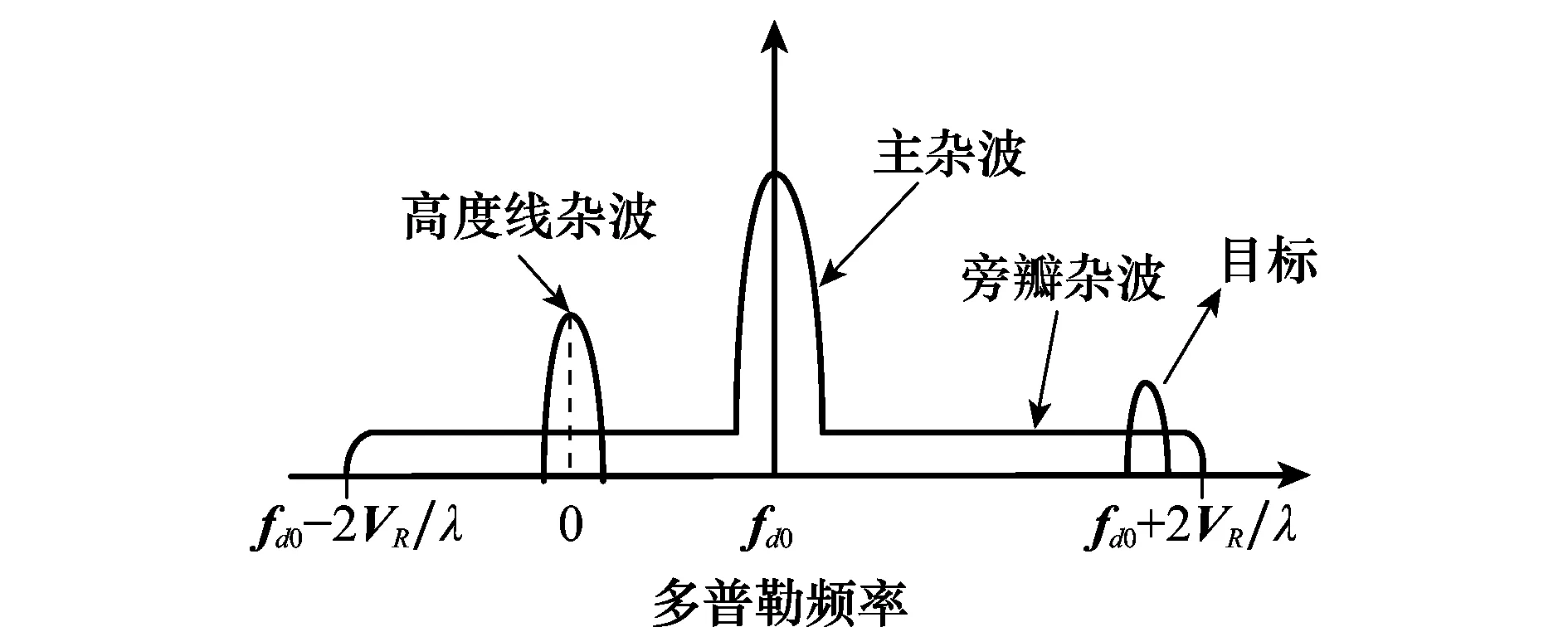
图2 预警机雷达杂波频谱分布示意图
主瓣杂波即天线主波束所产生的杂波。预警机雷达的主瓣频谱与天线主波束的宽度、方向角、载机速度、发射信号波长及回波脉冲串的长度、天线扫描的周期变化、地物的变化等因素有关。其中心频率可表示为
(1)
载机正下方的旁瓣所产生的杂波称为高度线杂波。它的多普勒频移为零,且高度线杂波离雷达距离近,加之垂直反射强,所以在任何时候,在零多普勒频率处总有一个较强的杂波。同时,高度线杂波谱也具有一定的宽度。
1.2PD体制雷达多普勒盲区分析
PD体制雷达主要依靠对回波信号的频域处理来探测目标,也就是目标的多普勒特性。由1.1节中分析的预警机雷达的杂波特性可知,载机平台的运动使得杂波产生多普勒频移的同时,也使得杂波谱的展宽严重,尤其是主瓣杂波和高度线杂波展宽形成的遮挡效应,对目标的检测性能产生非常不利影响。一旦目标多普勒频率落入这两类杂波的遮挡区域,将无法检测到目标,这就是PD体制雷达的多普勒盲区[13-15]。由于目标相对雷达的径向速度决定了其多普勒频率,从而直接决定了目标是否落入多普勒盲区。因此,必须结合目标与预警机的相对运动关系来对PD体制雷达的多普勒盲区进行分析。
(2)

图3 目标与载机的相对运动关系
当目标与预警机的相对速度Vr接近于零时,其回波信号在频域上落入高度线杂波区。最典型的例子是,当目标与载机平行飞行,且速度大小与方向相同时,相对速度为零,目标在频域中落入高度线杂波区。高度线杂波频谱有一定宽度,由此也就造成了雷达在速度上的探测盲区。但高度线杂波仅在近距离处(载机垂直高度)有分布,目标和高度线杂波一般分布在不同距离单元,可以较容易抑制。而主瓣杂波则在多个距离单元均有分布。因此,下面主要分析主杂波引起的多普勒盲区。
(3)

(4)
由式(4)可知,当把载机平台的运动补偿后,即把主杂波谱中心搬到零频,多普勒盲区可等效为[-Δf,Δf],此时仅考虑fdt是否落入盲区,等效的速度范围为[-VMD,VMD],其中VMD表示预警机PD雷达的多普勒速度门限。多普勒速度门限VMD由主杂波宽度决定,而主杂波谱宽度则由目标速度、波长、波束指向和主波束宽度决定。在实际应用中要得到准确的多普勒速度门限比较困难,因此经常选择30~50 m/s之间的一个固定经验常数当作多普勒速度门限。
2基于多普勒盲区的低空突防航线规划
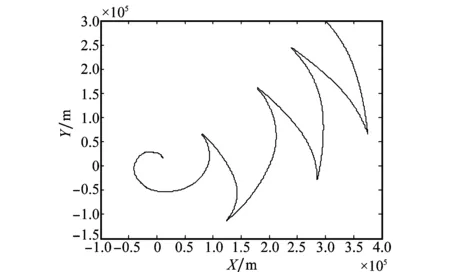
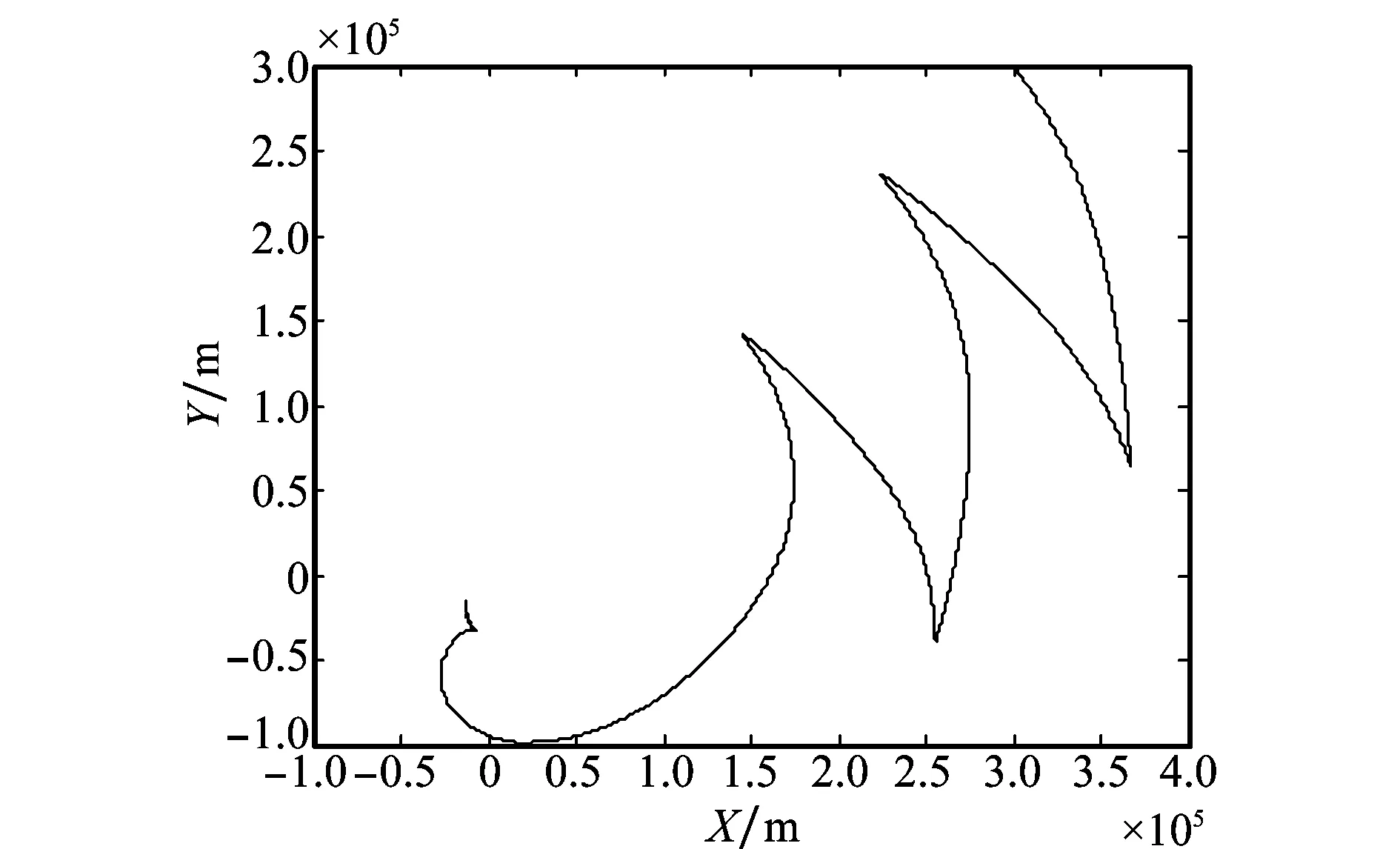
在规划基于多普勒盲区的低空突防航线之前,考虑规划的简单性,作如下两点假设:①假设敌方预警机的航线为类似于田径运动场跑道的双平行线形航线,如图4所示,距离地面的高度为H,上下是长度为L的平行直线,两侧是半径为r的半圆,且预警机以固定速度VR在航线上飞行;②假设我方战机以固定的速度VT在固定的高度h上突防,h的范围为150 m 图4 预警机双平行线形航线示意图 图5为我方战机与敌方预警机的几何位置关系示意图。XOY面为战机的低空突防平面,距离地面的高度为h,预警机航线距离地面的高度为H,航线的中心O′在XOY面的垂足为O。战机的速度方向与视距方向的夹角为φ,战机与坐标原点O的距离是R。 本文提出的低空突防航线规划建立如下: minR(t) (5) 式中,R(t)表示t时刻战机与原点O的距离。规划中的目标函数使得战机以最快时间成功突防;约束函数保证了战机处在多普勒盲区中,实现相对于预警机雷达的“隐身”。利用式(5)求得战机在每个时刻的坐标,连接起来就可以得到本文所需要的低空突防航线。 图5 预警机和飞机的起始位置图 战机的速度方向与视线方向的夹角φ随着预警机和战机的位置变化而变化。令预警机在起始时刻和t时刻的位置坐标分别为(-r,0,H-h)和(xR(t),yR(t),H-h),由假设①可知预警机的航线以及速度是固定的,其位置坐标可以用时间t的函数表示如下: (1) 如果0≤s(t)≤0.5L (2) 如果0.5L (3) 如果0.5L+πr≤s(t)≤1.5L+πr (4) 如果1.5L+πr (5) 如果1.5L+2πr≤s(t)<2L+2πr 式中,s(t)=(VRt)|(2L+2πr),|表示求余数运算。 战机的速度方向与视线方向的夹角的余弦可以用式(6)表示: (6) 式中,·表示向量的内积运算。 本文使用固定时间步长的搜索方法对战机的位置坐标进行求解。令搜索时间步长为t0,战机的速度方向可近似表示为 (7) 将式(6)和式(7)代入规划(5),突防航线规划最终变成以战机坐标位置为变量的规划问题。 固定时间步长的搜索方法的具体实现如下:首先,利用已知t时刻战机位置坐标和航线规划(5),求得t+t0时刻战机位置坐标;然后,再利用t+t0时刻的战机位置坐标和航线规划(5),求得t+2t0时刻的战机位置坐标,如此反复,当战机接近O点,成功突防时终止。将所有时刻的战机位置坐标连起来就得到战机低空突防的航线。固定时间步长搜索方法需要选用合适的时间步长,实战中考虑到战机机动性能的限制,突防航线不需要特别精确,时间步长可以选择为1s左右。如果敌方预警机的速度比较快,时间步长要选择小一点,防止战机飞出预警机雷达的多普勒盲区。 3仿真实验 在Matlab平台下对基于多普勒盲区的低空突防航线规划进行仿真。设置仿真参数如下:敌方预警机的双平行线形航线的长L=80 km、半径r=15 km,预警机雷达距离地面的高度H=9 000 m,预警机的飞行速度VR=150 m/s;我方战机的低空突防高度h=300 m,战机的速度VT=300 m/s,战机起始位置坐标为(300 km,300 km,0)。 用固定时间步长的搜索方法对低空突防航线的规划进行求解,这里选用的固定时间步长为1 s,当战机距离O点20 km时,搜索终止。图6和图7分别是多普勒速度门限VMD=30 m/s和VMD=40 m/s时的低空突防航线图。低空突防航线主要呈锯齿状,多普勒速度门限VMD=30 m/s时的锯齿比较密,突防的路程较长,突防所需时间较长;而当多普勒速度门限VMD=40 m/s时的锯齿比较疏,突防的路程较短,突防所需时间较短。图8是不同多普勒速度门限下战机离目的地的距离与飞行时间的关系。当多普勒速度门限VMD=30 m/s时,战机飞行6 607 s后实现突防;当多普勒速度门限VMD=40 m/s时,战机飞行4 968 s后实现突防。 图6 多普勒速度门限为30 m/s时的突防航线图 图7 多普勒速度门限为40 m/s时的突防航线图 图8 战机与原点的距离与飞行时间的关系 从仿真实验的结果可以看出,基于多普勒盲区的低空突防航线主要呈锯齿状,多普勒速度门限的大小决定了锯齿的疏密以及锯齿的个数。多普勒速度门限越大,锯齿越疏,锯齿的个数越少,这意味着突防路程越短,突防所需要的时间也越短。 由于战机受过载所限有一个最小转弯半径,在实际突防中无法严格按照本文提出的突防航线飞行,因此,需要对航线进行平滑处理。这里使用Local Regression Smoothing方法对突防航线进行平滑[16]。图9和图10分别是多普勒速度门限VMD=30 m/s和VMD=40 m/s时突防航线平滑图,图中选用的局部数据宽度是0.3,对航线上点进行修正后,进行二次多项式拟合。 图9 多普勒速度门限为30 m/s时突防航线的平滑图 图10 多普勒速度门限为40 m/s时突防航线的平滑图 4结论 在研究地物杂波特性和多普勒盲区形成机理的基础上,对基于多普勒盲区的低空突防航线进行规划,使用固定时间步长的搜索方法对规划进行求解。通过仿真结果可以看出,低空突防航线主要呈锯齿状,当多普勒速度门限越大,锯齿越稀疏,且锯齿的个数越少,突防航线的路程越短,突防所需时间越少,这与复杂杂波地形条件下更有利于突防的常识是吻合的。 考虑突防航线的实际可飞性,本文进一步使用Local Regression Smoothing方法对突防航线进行平滑。仿真实验结果验证了本文提出的基于多普勒盲区的低空突防航线规划的正确性和有效性。 参考文献: [1] Li N J.Introductiontoairborneearlywarningsystems[M].Beijing: National Defence Industry Press, 1998. (郦能敬. 预警机系统导论[M].北京: 国防工业出版社, 1998.) [2] Liu B, Shen Q, Li W Q.Airborneearlywarningsystem[M].Beijing: National Defence Industry Press,2012.(刘波,沈齐,李文清.空基预警探测系统[M].北京:国防工业出版社,2012.) [3] Zhan L X,Tang Z Y,Zhu Z B.Novel method of long term coherent integration detection for maneuvering small RCS targets[J].SystemsEngineeringandElectronics,2013,35(3):511-516.(战立晓,汤子跃,朱振波.高机动小RCS目标长时间相参积累检测新方法[J].系统工程与电子技术,2013,35(3):511-516.) [4] Wang G S, Li Q, Dai K X, et al. Blind compensation for multi-AWACS cooperation based on aerial defence and warning[J].SystemsEngineeringandElectronics, 2012, 34(5): 941-946. (王国师, 李强, 代科学, 等. 基于防空警戒任务的多预警机协同补盲[J].系统工程与电子技术, 2012, 34(5): 941-946.) [5] Liu B, Chen C H, Shen Q. A study on flight course for airborne early warning radars coordinated detection[J].ModernRadar,2012,34(6):1-4.(刘波,陈春晖,沈齐.机载预警雷达协同探测航线模式研究.现代雷达,2012,34(6):1-4.) [6] Clark J M C,Kountouriotis P A,Vinter R B. A methodology for incorporating the Doppler blind zone in target tracking algorithms[C]∥Proc.ofthethe13thInternationalConferenceonInformationFusionProceedings,2010:1481-1488. [7] Fu Y, Tang Z Y, Sun Y J. Blind Doppler zone target detection based on muti-AEW radar information fusion[J].FireControl&CommandControl, 2013, 38(5): 772-776. (付莹, 汤子跃, 孙永健. 多预警机雷达信息融合的多普勒盲区目标检测[J].火力与指挥控制, 2013, 38(5): 772-776.) [8] Long T, Ren L X. PRF pulse Doppler stepped frequency radar[J].ScienceinChina(SeriesF), 2009, 52(5): 883-893. [9] Mertens M, Nickel U. GMTI tracking in the presence of Doppler and range ambiguities[C]∥Proc.ofthe14thInternationalConferenceonInformationFusion,2011:1-8. [10] Han W,Zhu Z B, Tang Z Y. A method of tracking targets in Doppler blind zone based on multiple-hypothesis motion models[J].JournalofElectronics&InformationTechnology, 2013, 35(3):516-523. (韩伟, 朱振波, 汤子跃. 一种多普勒盲区条件下的多假设运动模型目标跟踪方法[J].电子与信息学报, 2013, 35(3):516-523.) [11] Koch W. Effect of Doppler ambiguities on GMTI tracking[C]∥Proc.oftheIEEEConferenceonRadar, 2002:153-157. [12] Zhan L X, Tang Z Y, Zhu Z B, et al. Modeling and characteristic analysis of clutter for tethered aerostat borne bistatic radar[J].JournalofDataAcquisition&Processing, 2012, 25(6): 777-782. (战立晓,汤子跃,朱振波,等.空地双基地雷达杂波建模与特性分析[J].数据采集与处理,2010,25(6):777-782.) [13] Gordon N, Ristic B. Tracking airborne targets occasionally hidden in the blind Doppler[J].DigitalSignalProcessing, 2002, 12(2): 383-393. [14] Shi Z G, Hong S H, Chen K S. Tracking airborne targets hidden in the blind Doppler using current statistical model particle filter[J].ProgressinElectromagneticsResearch,2008,82(1):227-240. [15] Du S C, Shi Z G, Zang W, et al. Using interacting multiple model particle filter to track airborne targets hidden in blind Doppler[J].JournalofZhejiangUniversityScienceA, 2007, 8(8): 1277-1282. [16] William S, Susan J. Locally-weighted regression: an approach to regression analysis by local fitting[J].JournaloftheAmericanStatisticalAssociation, 1988, 83(403): 596-610. 汪先超(1980-),男,工程师,博士,主要研究方向为雷达信号与信息处理。 E-mail:xc_wang@aliyun.com 汤子跃(1966-),男,教授,博士,主要研究方向为雷达系统、雷达信号处理。 E-mail:tang_ziyue@yahoo.com 朱振波(1977-),男,讲师,博士,主要研究方向为雷达信号处理与成像技术。 E-mail:zzbradar@126.com 连晓锋(1990-),男,硕士研究生,主要研究方向为雷达信号与信息处理。 E-mail:1248656228@qq.com 网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20141212.0848.001.html Flight planning of low-altitude penetration based on Doppler blind zone WANG Xian-chao1, TANG Zi-yue2, ZHU Zhen-bo2, LIAN Xiao-feng2 (1.PostDoctoralFlowStationofInformationandCommunicationEngineering,AirForce EarlyWarningAcademy,Wuhan430019,China; 2.TheThirdDepartment, AirForceEarlyWarningAcademy,Wuhan430019,China) Abstract:To complete target detection under the background of surface clutter, airborne early warning (AEW) radar commonly adopts the pulse Doppler (PD) system. However, the problem about the Doppler blind zone cannot be ignored. Based on the analysis of the character of surface clutter and the formation mechanism of the Doppler blind zone, a model for flight planning of low-altitude penetration is established. A fixed-time-step searching method is adopted to solve the model. On the route the fighter is invisible relative to the AEW radar using the Doppler blind zone. Moreover, low-altitude flight can avoid the detection of the radar above ground. Therefore, the route greatly increases the success rate of the fighter’s penetration. The simulation results demonstrate the correctness and effectiveness of the developed method for flight planning of low-altitude penetration based on the Doppler blind zone. Keywords:airborne early warning radar; Doppler blind zone; Doppler speed threshold; penetration flight 作者简介: 中图分类号:TN 959.73 文献标志码:A DOI:10.3969/j.issn.1001-506X.2015.07.11 基金项目:空军预警学院青年创新基金(2013QNCX0101,2014QNCX0112)资助课题 收稿日期:2014-06-25;修回日期:2014-11-14;网络优先出版日期:2014-12-12。