海洋波浪浮标检定装置的设计与实现
2016-01-23李文鹤薛宜童驻大连四二六厂军事代表室辽宁大连6000中国船舶重工集团公司第七二四研究所南京53
李文鹤,薛宜童,朱 飞,陈 雷(.驻大连四二六厂军事代表室,辽宁大连6000; .中国船舶重工集团公司第七二四研究所,南京53)
海洋波浪浮标检定装置的设计与实现
李文鹤1,薛宜童2,朱飞2,陈雷2
(1.驻大连四二六厂军事代表室,辽宁大连116000; 2.中国船舶重工集团公司第七二四研究所,南京211153)
摘要:介绍了一种应用于重力加速度式波浪浮标的检定装置。对类似装置在国内外的发展现状和特点进行了归纳总结,重点介绍了此装置模拟波浪浮标在近似正弦运动规律海浪中运动的技术实现手段。该装置波高、波周期等主要技术性能指标大大优于国内外同类产品。
关键词:波浪浮标;检定装置;波浪模拟
0 引言
随着全世界对海洋重视度的不断增加,各国的海洋活动越来越频繁。无论是对海洋资源的探索还是对海洋气候的研究,海洋环境数据的精确测量变得尤为重要。要想精确测量这些海洋数据,先进的海洋监测技术是不可或缺的。作为现代化海洋立体监测系统中的一项重要技术,波浪浮标是一种载有各类传感器的海水平台。它可以在海洋上进行定点或漂流的长期连续观测,实现数据的自动采集、自动标示和自动发送。在海洋环境条件恶劣时调查船无法采集到海洋信息,而海洋波浪浮标却能做到这一点。
随着大量波浪浮标的投入使用,要想保证海洋数据的测量准确性,必须对波浪浮标进行相应的计量检定,以保证其质量和使用可靠性。为此,2000年底,国家海洋标准计量中心建立了一套JBY1-1型波浪浮标检定装置,填补了我国波浪浮标检定领域的空白。然而,随着实际中的使用,其静态模拟海浪的机理不够成熟、波高调节量程不能满足要求等缺点逐渐暴露出来。因此,在保留该套装置的主体框架结构形式的基础上,对其进行机械结构优化设计显得十分重要。
1 海洋波浪浮标检定装置国内外发展现状
1.1国内海洋波浪浮标检定装置发展现状
目前,国内仅有两台海洋波浪浮标检测装置,分别是国家海洋标准计量中心的JBY1-1型波浪浮标检定装置和山东省科学院海洋仪器仪表研究所的JBA2-1型数控波浪模拟标定装置。相同的是两台设备均采用的桁架结构设计以及波浪模拟运动机理;不同的是JBA2-1型数控波浪模拟标定装置只能检测10 kg以下的传感器,而JBY1-1型波浪浮标检定装置不仅可以对重力加速度式传感器进行检定,还能为波浪浮标整体进行计量检定。图1为JBY1-1型波浪浮标检定装置,图2为JBA2-1型数控波浪模拟标定装置。

图1 JBY1-1型波浪浮标检定装置
1.2国外海洋波浪浮标检定装置发展现状
目前,世界上公认的波浪浮标校准方法主要是旋转式正弦模拟方法,其基本方法是将波浪浮标或传感器固定在校准装置上,随着装置的动作,带动浮标或传感器作近似正弦曲线的垂直方向的运动。美国国家海洋大气局(NOAA)的波浪浮标校准装置采用的是悬臂梁式桁架结构;英国国家海事研究所(NMI)的波浪浮标检定装置采用的是双臂式旋转架结构;挪威水实验室(NAL)的波浪浮标检定装置采用的也是双臂式旋转架结构。
2 总体设计方案
国内外波浪浮标检定装置的结构形式主要有悬臂梁式桁架结构、双臂式旋转架结构、单环式桁架结构以及双环式桁架结构。根据公认的波浪理论,可知海浪表面的水质点是在其平衡位置附近作周期性振动,在不同的时刻有不同的垂直加速度。测出此加速度,经二次积分即可得到海浪的垂直位置即波高。虽然结构形式各有不同,但共同点都是赋予被检传感器或浮标以某种方式的正弦振动或是近似正弦的垂直振动,或是圆周运动。故综合考虑结构简单、参数易调整、模拟方式接近海浪理论要求等因素,本方案将基于JBY1-1型波浪浮标检定装置的双环式旋转桁架结构形式,对其进行结构优化设计。
通过研究分析同类装置的优缺点及发展动向,将对原有的双环式旋转桁架结构形式的检定装置进行较大的创新与优化改进。关键技术就是使双环式旋转桁架式检定装置在作旋转运动的同时带动浮标搭载平台正弦波运动规律式左右摆动,来更逼真地模拟波浪浮标在真实海浪中的运动规律。
2.1系统组成及结构原理
该装置主要由双环桁架结构、电机与制动系统、控制器、终端显示软件4部分组成。
工作原理:控制器通过控制减速电机的转速来模拟波浪周期;减速电机转动带动双环桁架作旋转运动,搭载平台上的浮标也随之作旋转运动,而摆动机构可使得浮标在随双环桁架旋转运动的同时作正弦式左右摆动;可通过调节浮标搭载平台的位置来改变波高指标。浮标搭载平台正弦波浪模拟摆动由摆动机构中的曲柄驱动链轮随动方式实现,可保证搭载平台随旋转风车转动作最大±45°摆动。
刹车制动用于旋转风车式检定装置停车制动。
2.2关键技术的实现
由上述可知,海洋波浪浮标检定装置都是赋予被检浮标或加速度计以某种方式的正弦振动或近似正弦的垂直振动或圆周运动。旋转式海洋波浪浮标检定装置的关键技术点就是如何逼真地模拟出波浪浮标在海洋波浪中运动的形式状态,如图3所示。

图3 正弦特性波浪波高、波周期图
在旋转式海洋波浪浮标检定装置中,为更逼真地模拟出浮标随海面上运动轨迹,要求浮标在随旋转风车转动时在平动的基础上作正弦规律的摆动,且摆动的角度可以调节。
如图4所示,在链轮传动中,当主动链轮和从动链轮的节距、齿数完全相同(传动链节距的变化可忽略不计),相对于任一惯性系,不论两链轮空间相对位置如何变化,任一时刻两链轮的旋转速度,旋转方向均相同。可以通过控制主动链轮的运动,以使得从动链轮做周期性的正弦规律摆动。
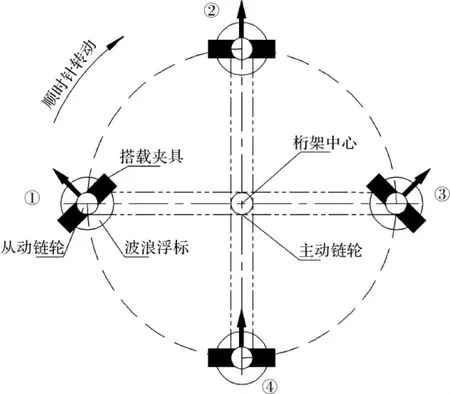
图4 旋转式海洋波浪浮标检定装置原理图
为使主动链轮实现周期性正弦规律摆动及幅度可调,采用了曲柄滑块加齿轮齿条机构,如图5所示。通过调节滑块离圆心的距离来控制齿条的行程,再由齿条带动主动齿轮(链轮A)周期规律性的摆动。

图5 角度调节摆动机构
本装置上对称设置了两个浮标搭载平台,提高了波浪浮标的检定效率,方便了运行过程中配重的调节。但是,要使两个浮标搭载平台在随着双环桁架作公转的同时作周期性正弦规律摆动,这里就必须设置两套曲柄滑块加齿轮齿条机构。笔者创新性巧妙地将双环桁架的一个半轴设计成空心三层轴体,如图6所示,外轴通过轴承座固定,用于支撑双环桁架作旋转运动;中轴和心轴分别用于传动两个浮标搭载平台的摆动。
双环桁架匀速旋转带动固定在外轴上的两个链轮转动。两个链轮分别带动曲柄滑块机构,将旋转运动转变为齿条的上下往复运动,经过齿轮齿条运动副带动中轴和心轴上另一端的主动链轮作正反转摆动,从而经链条传动至浮标搭载平台。

图6 空心三层轴机构
2.3总体结构形式
2.3.1双环桁架结构
本装置采用南北双环桁架、两半轴体结构。双环桁架每环均由槽钢和扇形板组成射状结构;南环半轴为实心轴,直接与轴承座、制动器、离合器、减速器电机相连;北环轴为空心轴,内套两层轴分别控制两个搭载平台的摆动,其外轴通过轴承套固定;两环之间用十字杆交叉连接以提高强度,传递扭力矩。两个浮标(传感器)搭载平台设置在旋转风车对称的方向。双环桁架结构图见图7和图8所示。
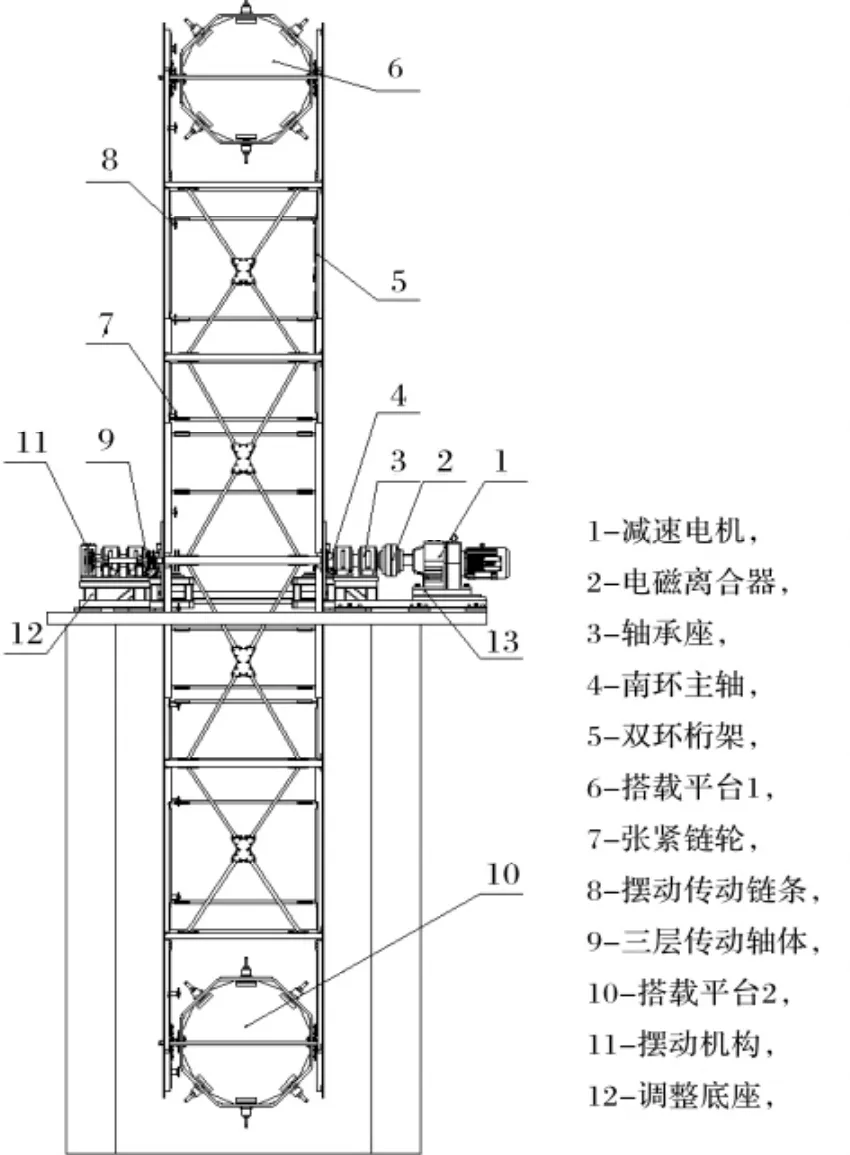
图7 结构组成图
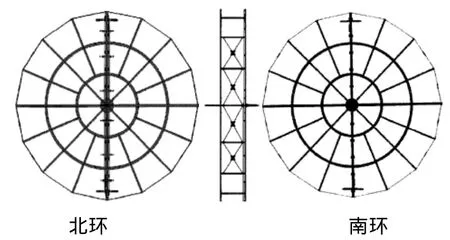
图8 双环桁架
2.3.2搭载平台摆动装置机构
浮标搭载平台用于安装被测波浪浮标(传感器)或配重,平台安装在旋转风车主骨架上的活动导轨上。为实现搭载平台在大旋转风车转动时同步可作最大± 45°摆动,采用了图9所示的曲柄驱动链轮传动方式实现。为保证整个装置在旋转过程中搭载平台相对稳定(固定摆幅的往返摆动),大旋转风车只有一个变频电机驱动。旋转风车主轴分为三层轴,并在中心的两个轴上安装链轮,通过链条传动带动曲柄机构转动,再由曲柄机构带动齿条作上下移动,啮合齿轮从而达到摆动的效果。在曲柄机构上通过把手旋转丝杆推动滑块来调节摆动角度。
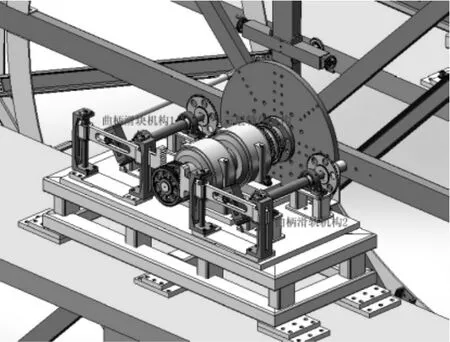
图9 曲柄连杆机构
在大旋转风车的槽钢中心顶端安装可以自由转动的小链轮(相对中心轴链轮直径小40%),与中心轴联成一传动机构,在载荷平台上安装与中心轴同样尺寸参数的链轮,与载荷平台固定,使载荷平台随旋转风车转动的同时,实现±45°的摆动。
3 结束语
本文主要针对JBY1-1型波浪浮标检定装置进行了优化设计与改进。创新性地将双环桁架轴体更改为三层空心轴体,并增加了曲柄滑块机构使得浮标在搭载平台上随双环桁架作旋转运动的同时作左右摆动运动,而不在是一直处于水平状态。这可使浮标在检定的静态模拟测试设备上更逼真地作正弦运动规律的运动,进行波浪浮标的波高和波周期的检定,进一步提高了检测精度,具有一定的应用价值。
参考文献:
[1]陈华秋,赵维三,李希玲,等.JBY1-1型波浪浮标检定装置[J].海洋技术,2001(4):18-25.
[2]隋军.重力加速度式波浪浮标量值溯源体系研究[D].中国海洋大学硕士论文,2006.
[3]李明钊.岸用光学测波仪精度分析[C].海洋测量技术与测量仪器论文集,1983:132-135.
[4]Magoon D T,Hemley J M.Ocean Wave Measurement and Analysis PP.1054,1994
[5]Procedures and Problems Associated with the Calibration of Wave Sensors Adv.Underw.Tech.Offs.Eng.Vol.4P.55-82
Design and implementation of an ocean wave buoy calibrating device
LI Wen-he1,XUE Yi-tong2,ZHU Fei2,CHEN Lei2
(1.Military Representatives Office of No.426 Factory in Dalian,Dalian 116000,China; 2.No.724 Research Institute of CSIC,Nanjing 211153)
Abstract:A calibrating device used in the gravity acceleration wave buoy is introduced.The status quo and characteristics of the similar devices at home and abroad are summarized,and the technical ways of using the device to simulate the motion of the wave buoy in the waves with approximate sine motion law are discussed emphatically.The main technical performances and indexes of this device such as the wave height and period are greatly superior to the similar products at home and abroad.Keywords: wave buoy; calibrating device; wave simulation
作者简介:李文鹤(1986-),男,助理工程师,研究方向:船舶监造;薛宜童(1979-),男,高级工程师,研究方向:大气与海洋类雷达系统;朱飞(1989-),男,助理工程师,研究方向:大气与海洋类雷达系统;陈雷(1971-),男,工程师,研究方向:雷达总体技术。
收稿日期:2014-12-14
文章编号:1009-0401(2015)02-0015-04
文献标志码:A
中图分类号:TN91
