基于当前统计模型的交互融合跟踪算法
2016-01-23练学辉乔大雷海军驻南京地区雷达系统军事代表室南京0003中国船舶重工集团公司第七二四研究所南京53
练学辉,闫 龙,乔大雷(.海军驻南京地区雷达系统军事代表室,南京0003; .中国船舶重工集团公司第七二四研究所,南京53)
基于当前统计模型的交互融合跟踪算法
练学辉1,闫龙2,乔大雷2
(1.海军驻南京地区雷达系统军事代表室,南京210003; 2.中国船舶重工集团公司第七二四研究所,南京211153)
摘要:当前统计模型对于不同的机动类型需要采用不同的自相关时间常数,单一的当前统计模型滤波器不能够完成对不同机动频率目标的精确跟踪,同时当前统计模型对非机动目标跟踪效果并不理想。本文在交互多模型算法的基础上融合常速模型及不同自相关时间常数的当前统计模型,实现对非机动目标及不同类型、不同程度机动目标的自适应跟踪。
关键词:当前统计模型;非机动目标;机动目标;交互多模型
0 引言
雷达目标跟踪一直都是一个广受关注的课题。随着现代航空航天技术的迅速发展,各种飞行器的运动速度及机动性变得越来越高,对不同机动类型目标的可靠精确跟踪是一个关键的难点。当前统计模型算法针对目标的机动特性作出先验假设,对特定类型的机动具有较高的跟踪精度。文献[2]对当前统计模型算法进行了修正,对不同的机动特性建立一个当前统计模型,然后融合几种模型的滤波结果,对不同机动类型均有较高的跟踪精度,但对非机动目标的跟踪误差仍然较大。在此基础上,本文将不同自相关时间常数的当前统计模型与常速模型融入到交互多模型算法中。仿真结果表明,本文算法不仅对不同类型机动目标达到较高的跟踪精度,对非机动目标也能较稳定地跟踪。
1 当前统计模型
当前统计模型算法采用瑞利分布来描述机动加速度的统计特征,假设的分布具有分布随均值变化而变化、方差由均值决定的优点。该算法在估计目标状态的同时还可辨识出机动加速度均值,从而实时地修正加速度分布,并通过方差反馈到下一时刻的滤波增益中,实现闭环自适应跟踪[1]。
假设目标运动状态方程为[2]

预测方程为

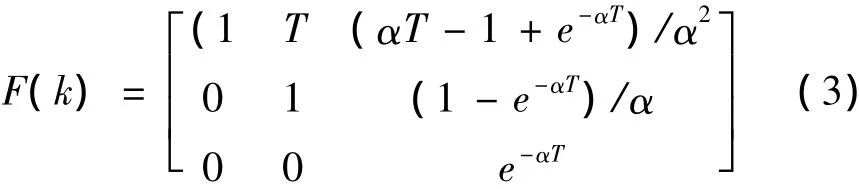
其中,F(k)为状态转移矩阵,即
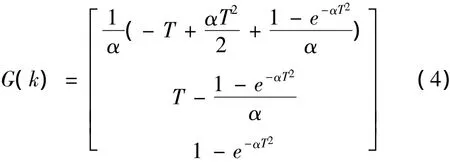
其中G(k)为输入控制矩阵,即
其中V(k)是离散时间白噪声序列,其协方差为
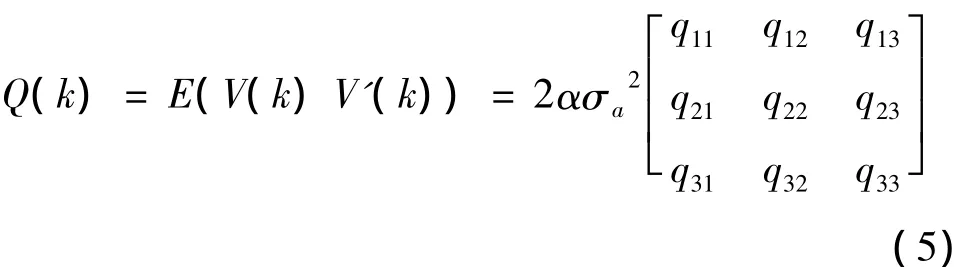
其中
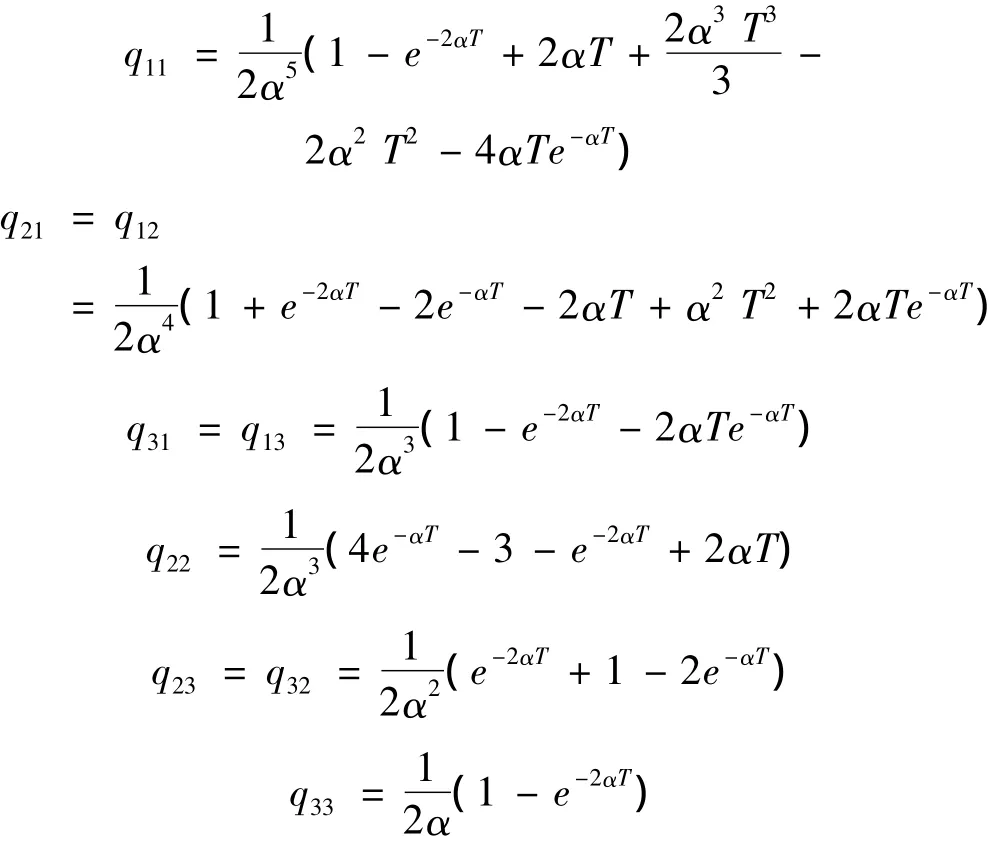
式中α为自相关时间常数,是机动时间常数的倒数,即机动频率。通常对于慢速转弯,1/α的取值是60 s,对于逃避机动是20 s,大气扰动是1 s,α的值需要通过实际测量才能确定;σa2为机动加速度方差;珔a(k)为机动加速度均值,即


当前统计模型能够很好地跟踪机动目标。然而,不同的机动类型需要设置不同的先验自相关时间常数与最大加速度,同时对于非机动目标的跟踪有较大的误差,这些都限制了当前统计模型的应用[1]。
2 当前模型的交互融合算法
2.1交互多模型
交互多模型算法在多模型算法的基础上考虑多个模型的交互作用估计目标的状态,是在广义伪贝叶斯算法基础上提出的一种具有Markov转移概率的算法,包含了多个滤波器、1个模型概率估计器、1个交互作用器和1个估计混合器,通过交互作用跟踪1个目标的运动轨迹。交互式作用器利用模型概率和模型转移概率在Markov链下计算每一个滤波器的交互估计。每一个滤波器利用交互式估计和量测数据计算出一个新的估计和模型的可能性,结合该时刻的模型概率及模型转移概率计算下一时刻的模型概率,总的滤波状态通过新的状态估计及相应的模型概率来计算[2]。
从模型i转移到模型j的转移概率为Ptij。
设X∧j(k-1|k-1)为k-1时刻的滤波器j的状态估计,P∧j(k-1|k-1)为相应的状态协方差阵,uk-1(j)为k-1时刻模型j的概率,其中,i,j =1,2…r。交互计算后r个滤波器在k时刻的输入如下:
将∧Xoj(k-1│k-1)、P∧oj(k-1│k-1)作为k时刻第j个模型的输入,得到相应的滤波输出为X∧j(k│k)、P∧j(k│k)。根据模型j滤波残差vjk及相应的协方差Sjk,计算模型j的可能性:

根据模型j的可能性,更新模型j的概率:

根据更新的模型概率可得到该时刻最终的滤波结果:

传统的交互多模型算法中常用的模型有常速模型及常加速模型。传统的交互多模型算法对于机动目标能够自适应跟踪,但在转弯机动时明显有较大的误差。
2.2多模型交互融合算法
针对当前统计模型算法难以根据不同类型的机动自适应地选取自相关时间常数的问题,本文结合交互多模型算法,设置多个不同时间的自相关时间常数的当前统计模型,然后将这些模型作为交互多模型算法中的各个滤波器的滤波模型。同时,为了弥补当前统计模型对非机动目标跟踪精度低的缺陷,本文将常速运动模型融合到所设计的当前统计模型交互融合算法中,从而自适应地跟踪不同类型机动和非机动目标。
本文改进的当前统计模型交互融合算法包括常速非机动模型、转弯机动的当前统计模型,逃辟机动的当前统计模型和大气扰动的当前统计模型。理论上,该算法不仅对非机动目标能够精确跟踪,对不同类型不同程度的机动目标也能达到良好的跟踪效果。
3 仿真分析
本文中采用前文提到的自相关时间常数的3种经验取值,即α1=1/60,α2=1/20,α3=1,这样就基本涵盖了常见的机动方式,对3种当前模型取最大加速度amax=150 m/s2。公式(7)~(13)中r = 4。根据惯性规则,初始化转移概率P 为
初始化滤波器时不能判断目标的运动状态,对各模型赋以相同的概率,则初始化模型概率为

目标运动状态表示为

假设目标在空间极坐标内作S型躲避机动飞行,飞行速度200~300 m/s,S型机动大小为3 g,机动半径2~3 km。仿真环境为雷达检测周期为2 s,检测概率为0.9,叠加距离噪声为均方差为80 m的正态分布噪声,叠加方位和仰角噪声为均方差为0.3°的正态分布噪声。分别运用当前统计模型算法、传统交互多模型算法和本文的算法对目标进行跟踪作100次蒙特卡洛仿真,结果如图1~7,对各误差取均值得到精度统计如表1。
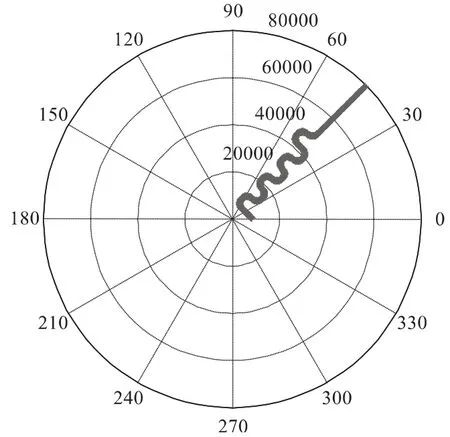
图1 目标运动轨迹
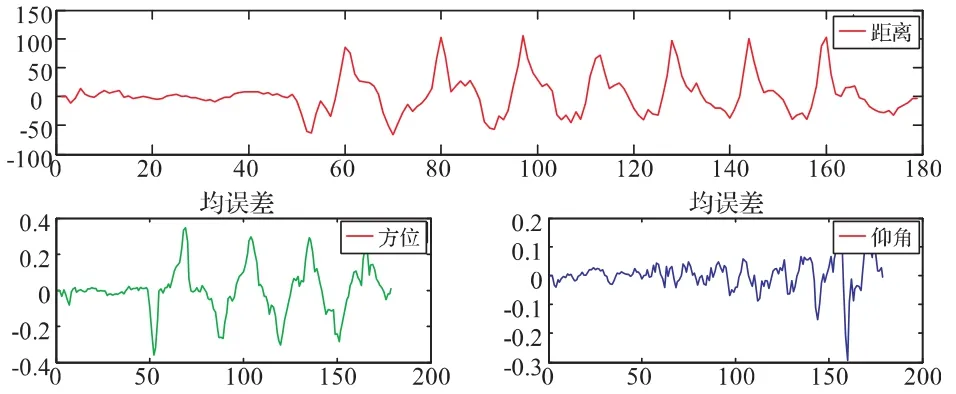
图2 传统交互多模型算法误差均值

图3 传统交互多模型算法误差均方值
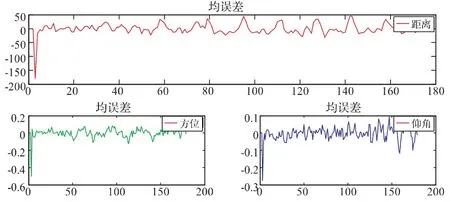
图4 当前统计模型算法误差均值
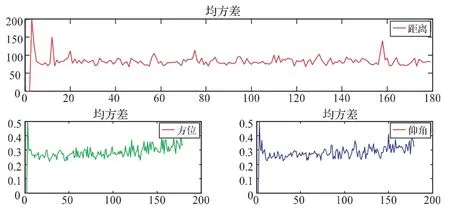
图5 当前统计模型算法误差均方值
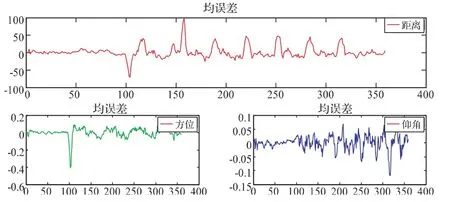
图6 本文算法误差均值
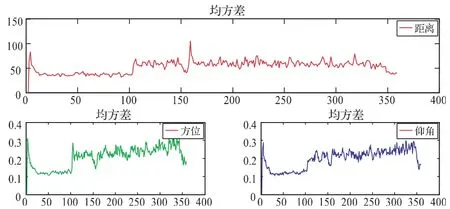
图7 本文算法误差均方值
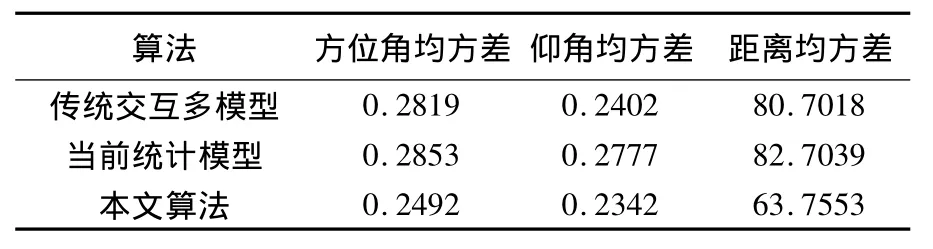
表1 各算法滤波精度统计
由仿真结果可以看出,传统的交互多模型算法对于目标作S型躲避机动时会出现较大的误差,这与其采用的模型有一定关系,常速模型和常加速模型对于目标转弯躲避机动的跟踪不能达到良好的效果。而从当前统计模型仿真结果可以看出,当前模型对于非机动的目标运动的跟踪会产生漂移现象,这也是当前统计模型一个固有的缺陷。而本文算法对于运动目标的非机动部分及机动部分都能做到稳定的跟踪,比原有算法的精度更高,而且具有更高的鲁棒性。
4 结束语
本文改进的当前模型交互融合算法弥补了当前统计模型对非机动目标的跟踪误差大的固有缺陷,同时避免了对自相关时间常数的计算过程,能够自适应地跟踪不同类型不同程度的机动目标,具有一定的实际使用价值。然而,本文算法在跟踪精度改进的同时也有一定的缺陷,就是算法复杂度较高,计算量较大,可能会影响到一定的实时性,这也是下一步工作要解决的重点问题。
参考文献:
[1]陆晶莹.高速高机动目标IMM跟踪算法研究[D].南京:南京理工大学,2010.
[2]何友,等.雷达数据处理及应用[M].北京:电子工业出版社,2006.1.
[3]周朝晖,嵇成新.多种滤波器方案对机动目标跟踪自适应比较[J].情报指挥控制系统与仿真技术,2003(10):24-36.
[4]陈亮.机动目标跟踪关键技术研究[D].哈尔滨工程大学博士论文,2012.
A combined interactive tracking algorithm based on current statistical model
LIAN Xue-hui1,YAN Long2,QIAO Da-lei2
(1.Military Representatives Office of Radar System of the PLA Navy in Nanjing,Nanjing 210003; 2.No.724 Research Institute of CSIC,Nanjing 211153)
Abstract:The current statistical model adopts different autocorrelation time constants for different maneuvering targets,and the single filter is not capable of tracking maneuvering targets with different frequencies accurately.At the same time,the tracking effect is also not satisfactory when it comes to tracking non-maneuvering targets.Based on the interactive multi-model algorithm,the current statistical model with different autocorrelation time constants is combined with the constant speed model to realize the adaptive tracking of non-maneuvering targets and diverse maneuvering targets.Keywords: current statistical model; non-maneuvering target; maneuvering target; interactive multi-model
作者简介:练学辉(1965-),男,高级工程师,研究方向:雷达总体技术;闫龙(1988-),男,助理工程师,硕士,研究方向:雷达数据处理;乔大雷(1980-),男,工程师,硕士,研究方向:雷达数据处理。
收稿日期:2015-03-12
文章编号:1009-0401(2015)02-0029-04
文献标志码:A
中图分类号:TN959.6
