一种多机器人编队控制策略及实现
2016-01-20尚会超,陈毛倩
一种多机器人编队控制策略及实现
尚会超, 陈毛倩
(中原工学院, 郑州 450007)
摘要:针对多机器人协作系统中机器人编队控制问题,采用了一种基于运动学的领航-虚拟跟随法的编队方法,并在跟踪控制方面对算法进行了改进和修正。MATLAB软件仿真以及在HR-I型双轮差速移动机器人实验平台上的实验证明,改进算法能够达到更好的编队效果。
关键词:多机器人;编队;跟踪控制;MATLAB仿真
中图分类号:TP24
文献标志码:A
DOI:10.3969/j.issn.1671-6906.2015.03.002
Abstract:Recently, in many research questions based on multi-robot cooperation system, formation problem is a widespread and relatively typical kind. In order to analyze the current problems within formation control, a formation method called “Leader-Virtual follower Method” is adopted in this paper that based on kinematics, it also is improved in tracking control and correction, then it is proved that the improved algorithm can achieve better result of formation through the MATLAB simulation and the HR-I two-wheel with different velocity mobile robot experimental platform validation.
收稿日期:2014-12-20
基金项目:国家自然科学基金项目(61305080);河南省高校科技创新团队支持计划(14IRTSTHN024)
作者简介:王永林(1977-),男,河南封丘人,讲师,硕士,主要研究方向为人工智能、电力电子与自动化控制。
文章编号:1671-6906(2015)03-0013-06
现代社会生活环境出现了越来越多的限制人类活动的极限状况,如地震、台风等自然灾害之后的搜救,军事上及安全部门的排雷追踪等。在这些场合,如果采用机器人去替代人来完成复杂并且有一定危险系数的操作,就能够有效提高效率,减少人员伤亡。因此,如何更好地对机器人群体进行组织,有效地处理多机器人之间的协作协调控制,怎样最大限度地发挥出多机器人系统的能力和潜在能力,已经成为近年来研究的一个热门课题。
多机器人的编队控制[1]是多个移动机器人在到达目的地的过程中,能够收敛于某种期望的队形,保持相对位姿不变的同时也要适应周边环境存在的约束(例如进行实时避障[2])的控制技术。近年来,随着计算机技术和生物科学等先进技术的发展,更多的智能算法被应用到多机器人系统编队控制中,比如文献[3]基于生物刺激神经网络的多机器人编队方法。有关队形控制文献多次提到的编队方法主要有3种:领航-跟随法(基于leader-referenced方法[4])、基于行为法和虚拟结构法。其中,领航-跟随法最为有效并且易于实施,因此被广泛运用。该方法的数学分析过程简便,机器人易于保持队形,具有高效的机器人群体运动效果。其基本思想是在多个机器人系统中选一个机器人作为整个群体的领导者(leader),群体中的其他机器人作为该leader的随从者(follower)。其控制过程是使follower机器人以预期的队形结构跟随leader机器人动作。文献[5]所采用的基于行为的方法可实现分布式控制,但这个方法的缺点在于队形控制的稳定性较差。文献[6]提出一种基于行为法与 leader-referenced 方法相结合的混合式编队算法,使多机器人编队效果更优。然而,这些方法都没有从根本上解决多机器人编队控制中稳定性和实用性这两个难题。
虚拟结构法[7]是将整个结构队形看作一个虚拟的刚体结构,结构中的每个机器人把刚体上的节点当作跟踪目标。这种方法的优点是行为容易描述,缺点是灵活性比较差。
此外,还有基于模糊原理和神经网络的智能避障算法[8],以及考虑动力学的鲁棒控制器方面的领航者模式编队方法[9]。该类算法的优点是能够快速编队,进行轨迹跟踪,但在稳定性、计算量控制方面还有很大的缺陷。
Balch T和Arkin R C最早提出领航-跟随的控制方法[7]。1998年,Desai J P等首先提出了一种领航-跟随队形的控制框架[10],并且用模型(l-φ)或(l-l)表示跟随者相对于领航者的位姿。该方法随后得到了进一步的发展和演化[11]。Fujimori A等提出了一种改进的跟随领航法[12],使得编队控制变得比较简单,但该方法在机器人掉队后重新恢复编队比较麻烦。
本文提出在一个队形结构中设置“虚拟领航者”(Virtual leader )的角色,将实际环境下多个跟随者机器人直接跟随领航者机器人的问题转化为每个机器人分别跟随其“虚拟领航者”的问题,使得编队控制变得比较简单,并且在文献[13-14]的基础上,针对跟随者机器人RFollower设计了速度控制函数vfc=[vfcωfc]T。通过计算,在控制器公式中得到两个新的附加项ηvfc和ηωfc。这两个附加项的引入,能够有效保证在领航者机器人角速度ωl≠0的情况下跟随者机器人的队形保持控制器的稳定性。
1编队控制策略
在多机器人系统控制中,编队控制是一个研究热点。多机器人系统的编队控制可以转化为两个邻近机器人存在局部领航与跟随的关系,即跟随机器人与其领航者保持一定距离与角度的关系。领航机器人的位姿确定后,跟随机器人的目标位姿也将被确定。
1.1机器人数学模型
考虑一组在全局坐标系下的非完整移动机器人,可假设系统中的每一个机器人都具有相同的运动模型(见图1),第i(1≤i≤n)个机器人在笛卡尔框架下的位姿被定义为Pi=[xiyiθi]T。其中,(xi,yi)是Ri的位置坐标,θi是其航向角度。
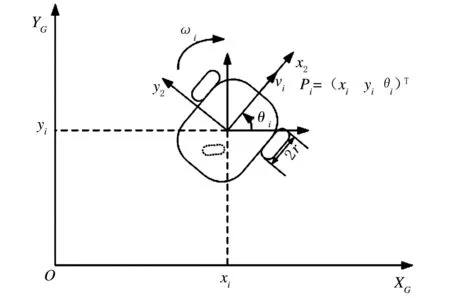
图1 单个非完整移动机器人
1.2领航-跟随结构队形控制
为了描述多机器人系统中各个机器人在队形结构中的位置,以两个机器人为例来说明本文所采用的领航者-跟随者队形结构的几何模型。假设任意的跟随者机器人RFollower,其跟随的领航者机器人为RLeader,则本文采用的领航者-跟随者队形的结构模型如图2所示。其中,领航者机器人线速度用VLeader来表示,线速度与水平方向的夹角用θLeader来表示。
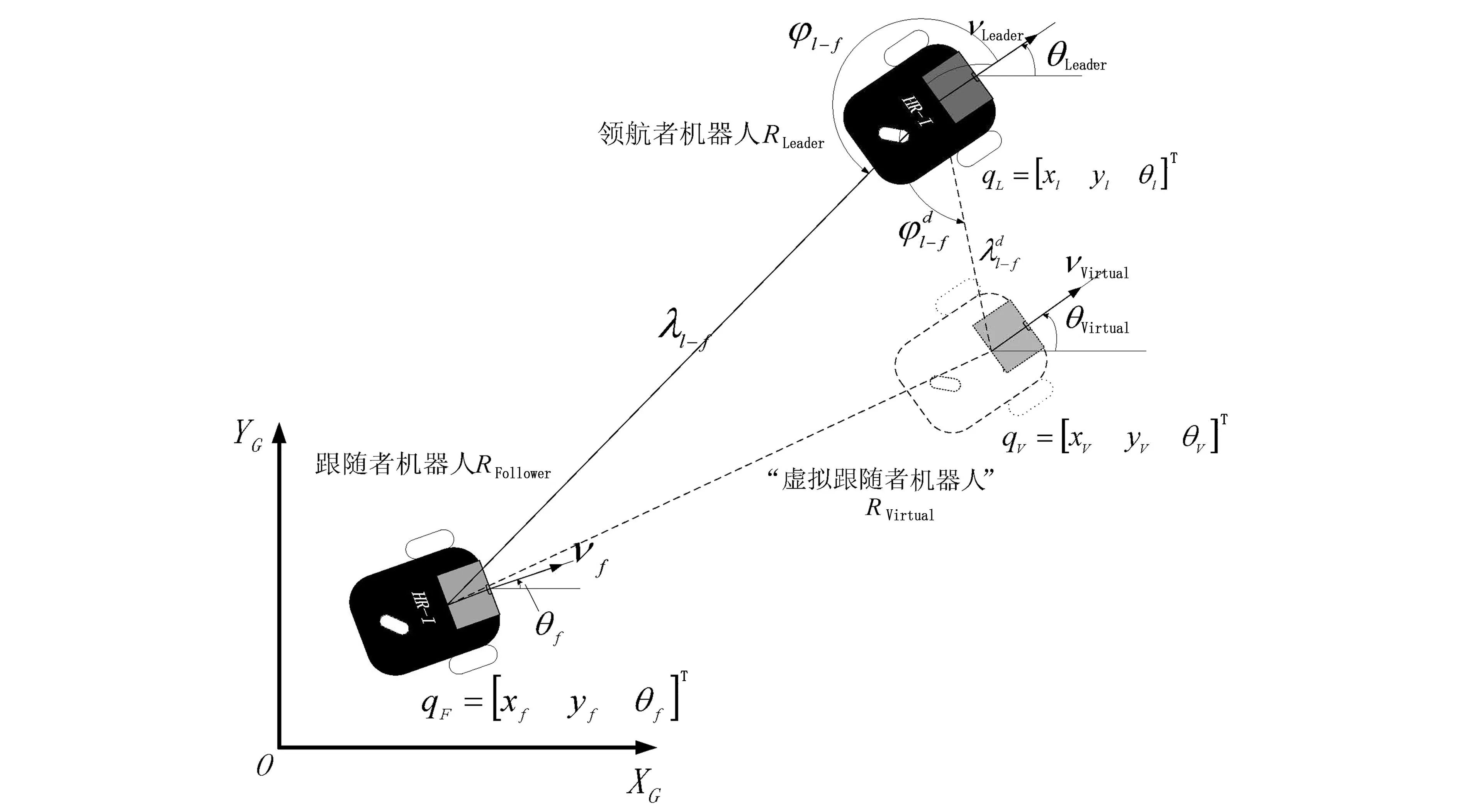
图2 领航者-跟随者机器人结构队形模型设计

系统中每个跟随者机器人都有一个与之对应的“虚拟跟随者机器人”。本文介绍的多机器人合作编队控制的方法是通过为RFollower设计适当的控制算法,使其可以完成实时跟踪“虚拟跟随者机器人”位姿qv,达到所期望的位姿,最终形成多机器人编队系统所期望的结构队形。
2运动学控制器的设计
根据图2给出的领航者-跟随者结构队形控制模型,在领航者机器人RFollower和“虚拟跟随者机器人”RVirtual之间建立期望的队列结构,将相对复杂的队形控制问题转化为简单的跟踪问题来研究。利用跟随者机器人的实时位姿和相对应的“虚拟跟随者机器人”的位姿,建立队形误差方程,并在此基础上设计运动学控制器,从而实现令队形中的每个跟随者机器人都收敛于其期望位姿,达到队形控制的目的。
领航者机器人RLeader的数学模型设为:
(1)
其中,vl=[vlωl]T是领航者机器人RLeader的实时线速度和角速度,设任意时刻下均有vl≥0。可以根据领航者机器人RLeader的确定位姿和预期结构队形Fd,得到“虚拟跟随者机器人”RVirtual的位姿:
(2)
领航者机器人RLeader与“虚拟跟随者机器人”RVirtual之间的相对位姿误差可定义为:
(3)
这里,[xfyfθf]T表示跟随者机器人RVirtual的实际位置和方向,其公式为:
(4)
上述相对位姿误差是在全局坐标系下得到的,为了便于实际中对各机器人的控制,有必要对相对位姿误差进行坐标转换,得到在跟随者机器人RFollower的坐标系下的队形跟踪误差。由图2中二者的相对位姿投影关系可得:
(5)
Te是转移矩阵。将式(2)、式(3)、式(4)代入式(5),并利用三角函数公式计算和简化,可得:
(6)


(7)

(8)
(9)
其中,kx、ky、kθ为正常量。与文献[10]中所设计的跟踪控制器相比,在上述控制器中可以观察到两个新引入的附加项ηvfc和ηωfc。相对于单个机器人运动控制中的目标跟踪控制来说,这两个附加项的引入能够有效地保证在领航者机器人RLeader角速度ωl≠0的情况下RFollower队形保持控制器的稳定性。
3仿真及实验验证
为了充分验证本文所提出的运动学控制器的有效性,采用MATLAB软件实现了多机器人队形形成的仿真实验。以柱形队形和三角形队形为期望队形,分别令领航者机器人按照直线、圆弧及正弦曲线行进;在实验方面,采用HR-I型双轮差速移动机器人实验平台进行验证。
3.1仿真验证
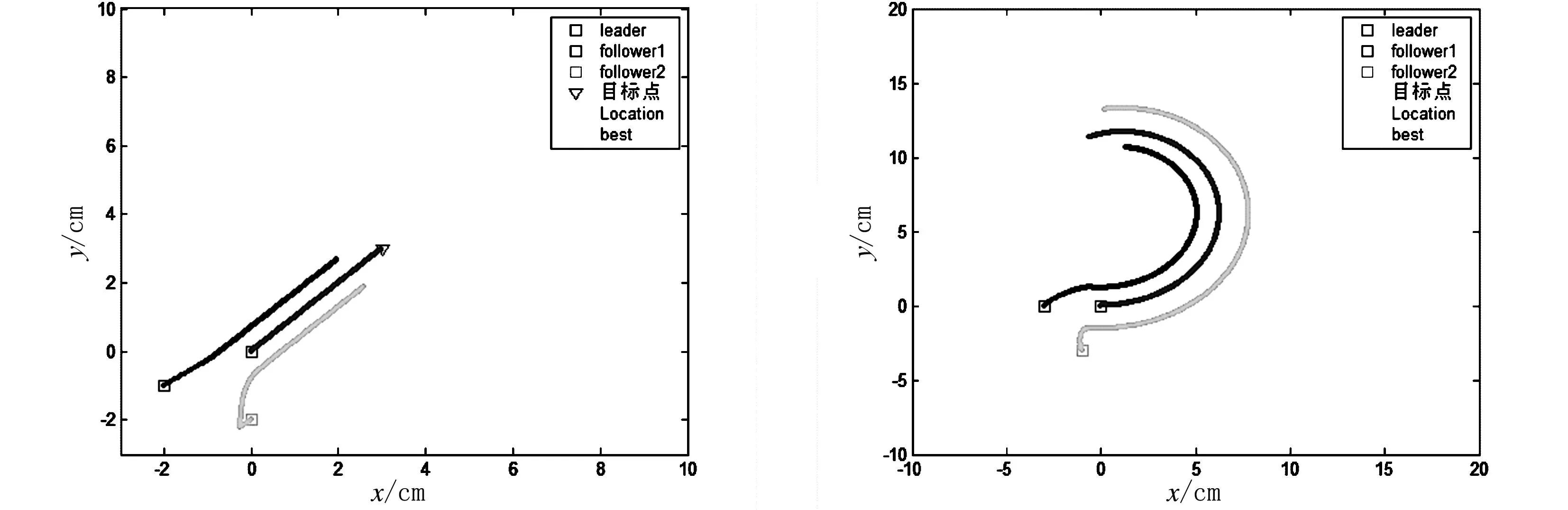
各机器人初始的位姿可任意指定。设定Leader机器人的初始位姿为qL=[000]T,Follower1机器人和Follower2机器人的初始位姿为qF1=[-2-1π/6]T。式(8)和式(9)中的位置增益向量选定为:K=[kxkykθ]T=[13.53.5]T。图3和图4分别为柱形队形和三角形对形的仿真结果。

(a)直线轨迹时柱形队形形成 (b)圆弧轨迹时柱形队形形成

(c)正弦轨迹时柱形队形形成 图3 柱形队形形成仿真过程
3.2实验验证
3.2.1领航者机器人Leader做直线运动
本文利用HR-I型双轮差速移动机器人实验平台进行了几组实验调试。首先选取领航者机器人以直线作为移动轨迹的情形进行编队实验,期望形成的队形结构则选取具有代表性的三角形队形和柱状队形,对应的视频序列如图5(a)和(b)所示。这两种队形对应的位姿参数分别为:
该实验过程中领航者机器人的运动速度为:
(a)直线轨迹时三角形队形形成 (b)圆弧轨迹时三角形队形形成

(c)正弦轨迹时三角形队形形成 图4 三角形队形形成仿真过程
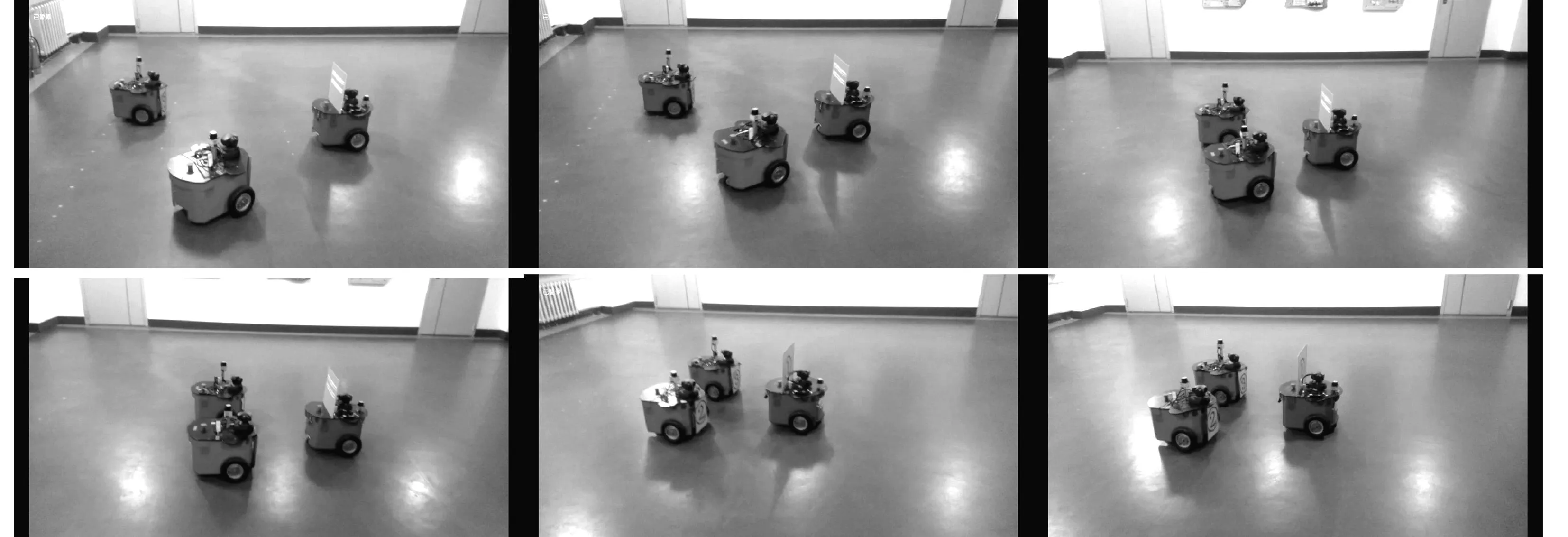
(a)等边三角形编队队形形成实验过程

(b)柱形编队队形形成实验过程 图5 HR-I移动机器人平台沿直线行走队形形成的视频画面
两个跟随者机器人的运动速度约束为:
3.2.2领航者机器人Leader做圆周运动
为验证这种编队控制方法对领航者机器人作复杂运动时的适应能力,本文选取领航者机器人以圆弧运动作为移动轨迹的情形进行编队实验。该实验视频序列如图6(a)和(b)所示。实验过程所对应的位姿参数分别为:

该实验过程中领航者机器人的运动速度为:
两个跟随者机器人的运动速度约束为:

(a)形成并保持三角形队形实验过程

(b)形成并保持柱状队形实验过程 图6 HR-I移动机器人平台沿圆弧轨迹行走队形形成的视频画面
4结语
(1)在MATLAB仿真软件中,各个机器人可以从任意的初始状态出发形成指定的期望结构队形,并且各机器人在队形保持及位姿跟踪方面具有很好的性能,验证了本文设计的编队控制方法的有效性。
(2)在HR-I型机器人平台上,领航者机器人分别沿直线和圆弧两组不同运动轨迹的队形形成实验,证明本算法对领航者机器人的运动轨迹具有很好的适应性及实用性。
参考文献:
[1]谭民, 王硕,曹志强.多机器人系统[M].北京:清华大学出版社, 2005: 120-124.
[2]冯刘中,肖世德,司徒渝,等.基于双移动信标的多机器人编队控制算法[J].信息与控制, 2011, 40(2): 145-159.
[3]仰晓芳,倪建军.基于生物刺激神经网络的多机器人编队方法[J]. 计算机应用, 2013, 33(5): 1298-1300,1304.
[4]Ghommam J, Mehrjerdi H, Saad M. Leader-follower Formation Control of Nonholonomic Robots with Fuzzy Logic Based Approach for Obstacle Avoidance[C]//International Conference on Intelligent Robots and Systems.Piscataway : IEEE, 2011: 2340-2345.
[5]Yuan J, Tang G Y. Formation Control for Mobile Multiple Robots Based on Hierarchical Virtual Structures[C]//IEEE International Conference on Control and Automation. Piscataway: IEEE, 2010: 393-398.
[6]张捍东,黄鹂,岑豫皖.改进的多移动机器人混合编队方法[J].计算机应用, 2012, 32(7): 1955 -1964.
[7]Balch T, Arkin R C.Behavior-based Formation Control for Multi-robot Teams[J].IEEE Transaction on Robotics and Automation, 1998, 14(6): 926-939.
[8]Das A K, Fierro R,Kumar V,et al. A Vision-based formation Control Framework[J].IEEE Transaction on Robotics and Automation, 2002, 18(5): 813-825.
[9]么洪飞,李艳东.多移动机器人的领航者模式编队控制[J].计算机仿真, 2014, 31(7): 330-333, 350.
[10]Desai J P,Ostrowski J P,Kumar V.Controlling Formations of Multiple Mobile Robot [C]//Proceeding of the International Conference on Robotics and Automation, Leuven, Belgium, USA: IEEE, 1998: 2864-2869.
[11]Desai J P, Ostrowski J P,Kumar V.Modeling and Control of Formations of Nonholonomic Mobile Robot[C] // Proceeding of the International Conference on Robotics and Automation, 2001, 17(6): 905-908.
[12]Fujimori A, Fujimoto T, Gabor B. Distributed Leader-follower Navigation of Mobile Robots[C]//Proceeding of the 5th International Conference on Control and Automation. Budapest: Institute of Electrical and Electronics Engineers Inc, 2005: 960-965.
[13]Dierks T, Jagannathan S. Control of Nonholonomic Mobile Robot Formations: Back-stepping Kinematics into Dynamics[C]//Proceeding of the IEEE International Conference on Control Application, Part of the IEEE Multi-conference on Systems and Control,USA: IEEE, 2007:94-99.
[14]Kanayama Y, Kimura Y, Miyazaki F, et al. A Stable Tracking Control Method for an Autonomous Mobile Robot [C]//Proceeding of the IEEE International Conference on Robotics and Automation. USA: IEEE, 1990:384-389.
(责任编辑:王长通)
A Sort of Control Strategy and Implementation
Based on Multi-robot Formation
SHANG Hui-chao, CHEN Mao-qian
(Zhongyuan University of Technology, Zhengzhou 450007, China)
Key words:multiple robots; formation; tracking control; MATLAB simulation

