大舵角下船舶操纵性指数K,T简易计算方法研究*
2016-01-08李国定李丽娜
张 彬 李国定 李丽娜 蒋 娇
(集美大学航海学院 厦门 361021)
大舵角下船舶操纵性指数K,T简易计算方法研究*
张彬李国定李丽娜蒋娇
(集美大学航海学院厦门361021)
摘要:根据船舶转向到新航向距离Dnc的计算公式,运用数学方法推导出操纵性指数K,T值的简易计算方法.并与现有其他方法进行对比,将该方法与Z形试验法计算的K,T值代入船舶一阶线性响应模型进行仿真验证,然后与基于船舶智能操控仿真平台的旋回试验数据进行对比,得出在操舵角大于等于20°时,简易计算方法比Z形试验法计算精度更高.因此,提出的简易计算方法对计算大舵角时的船舶操纵性指数K,T值具有可操作性和实用性.
关键词:船舶操纵性指数;旋回;Z形试验;响应模型;多元非线性回归分析
张彬(1989- ):男,硕士生,主要研究领域为交通信息工程及控制
掌握船舶操纵性指数K,T值对船舶操纵与安全航行有着极大帮助.通常计算K,T值有推荐的Z形实验方法[1]和回归分析估算公式法[2],然而实际上船员在工作中获得K,T值极为困难,船舶Z形实验方法须通过在特定的稳定海况下实施,该方法需操纵精确且计算繁琐,在实践中船员难以实现;而回归分析估算公式法也只能估算一种舵角下的船舶操纵性指数.因此,为船员寻求简易及具有可操作性的船舶操纵性指数K,T值的计算方法显得尤为重要.
1Z形实验计算K,T值方法
1.1Z形实验计算K,T值方法简介

1.2Z形试验计算K,T值的局限性
1) 一般以10°/10°Z形操纵试验结果求取的K,T指数为准,也可根据需要进行20°/20°Z形操纵试验,由于完成Z形操纵试验需较长时间及特定的稳定开阔水域和水深,K,T指数值随着舵角、吃水、吃水差、水深与吃水比、船体水下线型等因素的变化而变化[3-4].增加了船员在实际工作中获得K,T值的难度.
2) 在实验数据处理过程中,也验证了文献[5]提到的计算K,T值的局限性:

3) 实践中船员应用Z形实验计算K,T值需具备相当的数理基础,这是不现实的.
2回归分析计算K,T值方法
2.1回归分析计算K,T值方法简介
船舶操纵性能与船舶本身的物理特性、以及载态等因素有关[6],根据大量的不同类型船舶的船长、船宽、吃水、舵面积比、方形系数等对应的船舶K,T值,利用多元非线性回归分析模型[7],得出K,T指数的回归方程.得到量纲一的量的回归方程[8]:
(1)
(2)
2.2回归分析法的局限性
利用回归分析法得到的估算公式其精度依赖于试验样本的数量,而这些试验样本是通过大量的Z形试验得出,一般文献中提供的公式也仅限于10°/10°Z形试验一种工况下得出的,对于其他舵角的K,T值计算仍需按此方法做一系列的Z形试验和回归分析,实践中依然难以实现.
3计算K,T值简易方法
3.1计算K,T值简易方法
通过分析船舶转向的操纵过程,根据文献[3]将船舶旋回圈作合理化简化:(1)假定船舶在操舵之后,在纵距值到心距值前,一直保持在原航线前进,航向未改变;(2)假定船舶驶过心距之后,立即进入定常旋回,且忽略船舶在改向中的航速发生的变化.
由于应舵时间和船舶本身惯性会产生惯性滑行距离即滞距Re为
(3)船舶定常旋回半径R为
(4)
通过实验数据在已知船舶转向到新航向距离Dnc和旋回圈半径R的前提下,逆推计算公式得到相应的K,T计算公式
(5)
(6)式中:Vs为服务航速度,m/s;t1为操舵时舵角由正舵至δ0所需时间,s;δ0为所操舵角,rad.
根据实际航行信息得出Vs,t1,δ0,应用式(5),(6)即可求出相应的K、T值.该方法操纵简单,时间短,因而对海况要求较Z形试验低.
3.2特殊情况下Re与R的计算
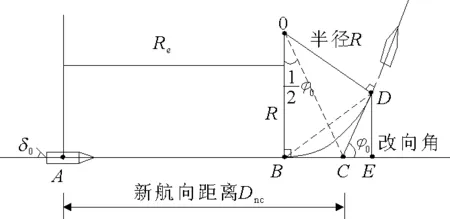
图1 新航向距离构成
为便于计算船舶转向到新航向距离Dnc和定常旋回半径R,本文将实验设计为船舶初始航向为0°(也适用初始航向为180°)的情况,以验证新方法的可行性;对于其他初始航向的情况,在获得准确的船舶转向到新航向距离Dnc和定常旋回圈半径R的前提下,根据式(5),(6)即可得到相应的K,T.见图1所示为船舶初始航向为0°的情况,根据实验数据获得点A、点B和点D的经纬度值,分别记作:A(φ1,λ1)、B(φ2,λ2)、D(φ3,λ3).其中:A是开始施舵时的起始位置点;B为与初始施舵点A保持经度相同即λ1=λ2(以精确到秒为标准)最远的位置点;D为船舶航向改变后任一位置点,对应改向角记为φ0;E为点D在直AC上的投影点,根据已知点的经纬度值计算相应的距离.则滞距Re为:
由式(5)可得
(7)根据图1中的几何关系可得
(8)由式(6),(8)得
(9)综上分析得出船舶初始航向为0°情况下K,T指数的简易计算方法.
(10)
(11) 式中:δ0为舵角,rad.
4实验数据分析对比
4.1实验船模信息
基于SIHC仿真平台[9],为了验证不同方法的K,T值计算结果,选择平台上集成的DMI(丹麦航海技术研究所)船模,如表1所列的3种不同类型的船模进行对比仿真实验.

表1 实验船模信息
对以上选定的船模在相同模拟环境下,每条船模以本船的服务船速Vs进行不同舵角下的Z形试验和旋回试验(初始航向为0°),并对计算的K,T值利用基于Matlab的一阶船舶仿真运动模型进行仿真验证.
4.2K,T值计算结果
对于实验数据,利用Matlab对三种方法进行编程分别计算K,T指数.由于船舶在旋回过程中存在降速现象,对简易法在同一舵角下的旋回,分别选取改向30°,60°和90°处的点作为点D进行计算,以充分反映船舶在旋回过程中的降速,提高计算精度.
表2中“简易法改向30°,60°和90°”表示利用简易方法的式(10),(11),分别选取船舶改向30°,60°和90°处的点作为计算点D,计算的K值;“回归公式法”是将公式(1)、(2)计算的结果进行有量纲转化后的K,T值.
通过表2中三种方法计算结果的对比,可以得到如下结论:
1) 简易法在同一舵角下的旋回过程中,对于选取的不同点D(30°,60°和90°改向角处的点)计算的K值不同,但相对偏差较小(10%以下),说明在此过程中船舶存在一定程度的降速,但对K值影响不大,与实际情况相符.
2) 简易法与Z形试验法的计算结果基本一致,从另一个方面验证了简易法计算K,T值的可行性.

表2 3种方法计算K,T值结果
3) 由于回归分析公式是基于大量10°/10°Z形试验的计算结果,其计算结果与10°舵角情况下的K,T值较接近,但与大舵角下另外2种方法计算结果偏差较大,说明文献中提供的回归公式已经不适用大舵角下精确K,T值的计算,但对于估测K,T值具有一定的参考作用.
4.3仿真验证
4.3.1一阶响应模型
根据船舶操纵的一阶响应数学模型[10],在已知K,T指数条件下,得到计算船舶回转角φ(t)和旋回轨迹公式
(12)
(13)利用Matlab提供的Simulink模块建立船舶的仿真模型[11]如图2所示,将式(13)中的速度进行高阶拟合,以消除速度误差对仿真结果的影响,对表2中的简易法和Z形试验法结果进行仿真,并与基于SIHC仿真研究平台的船模旋回试验航迹数据进行对比,则仿真结果精度仅取决于K,T值,以实现对K,T值的检验.

图2 一阶船舶运动模型仿真模块
4.3.2仿真验证结果
通常船舶从转满舵起到船首向改变40°~50°是避开来船或其他物体的关键阶段[12],本文仿真船舶从操舵开始到航向改变60°航迹和首向变化曲线,对表2中的简易法和Z形试验法的数据分别进行仿真验证,得到误差结果见表3.

表3 验证结果误差表
注:L为船长.
通过验证可以得出在船舶大舵角的操舵情况下(δ0≥20°),简易方法计算的K,T值比Z形试验法的数值精度更高,并且简易方法的操舵简捷、实验时间较短、计算简便.可以在船舶的航行过程中,根据船舶的航行记录信息,在获得船舶转向到新航向距离Dnc和定常旋回圈半径R的前提下,利用简易法的计算式(5),(6)分析计算船舶运行过程中的大舵角操舵情况下的K,T值,对航行过程的操船决策提供必要的依据.
5结束语
由于船舶在实际航行过程中,船舶自身的载态、航速以及海况等因素的变化,必定对船舶的操纵性产生不可忽视的影响,从而增加实际K,T值与原有实验获得K,T值之间的误差,对船舶的操纵决策产生不利影响.本文通过逆推船舶操纵性指数K,T,根据船舶转向到新航向距离Dnc和定常旋回半径R的计算公式得出计算K,T值的简易方法,并选取船舶初始航向为0°定常旋回的特殊情况进行计算,对实验结果利用旋回实验进行对比验证,在操舵情况(δ0≥20°)时得到如下结论:(1) 简易法在计算船舶大舵角情况下(δ0≥20°)K,T值具有可行性,并且比Z形试验法简捷,具有可操作性和实用性.在船舶实际航行过程中可根据相应的航行信息进行计算;(2) 简易法计算的K,T值比Z形试验法计算结果具有较高的精度,对紧迫危险下不可避免碰撞操船决策的研究[13-14]以及船舶在航行控制过程中的操纵决策具有一定的参考价值;(3) 简易法在精度要求不高,综合考虑船舶在旋回过程中的速降因素,满足实际航行需求的情况下,可以选择改向30°,60°和90°中的一个点作为计算点D,进行K值的计算.
参 考 文 献
[1]陆志材.王逢辰.船舶操纵[M].大连:大连海事大学出版社,2000.
[2]张显库,李元奎.船舶操纵性指数预报研究[J].中国航海,2009(1):96-10.
[3]古文贤.船舶操纵[M].大连:大连海运学院出版社,1993.
[4]王鹤荀,郭洪驹.船舶安全富余水深的确定[J].上海海事大学学报,2004,25(4):19-21.
[5]刘明俊,高国章.船舶操纵性指数计算方法的研究[J].武汉理工大学学报:交通科学与工程版,2003,27(2):227-228.
[6]洪碧光, 于洋.船舶操纵性指数 K、T 的统计分析[J].大连海事大学学报, 2000,26(4):29-33.
[7]方开泰.实用回归分析[M].北京:科学出版社,1988.
[8]李宗波,张显库,张杨.基于SPSS技术的船舶操纵性指数K、T预报[J].航海技术,2007,29(5):2-5.
[9]赵晴.船舶航迹智能控制算法的研究[D].厦门:集美大学,2012.
[10]吴秀恒.船舶操纵性与耐波性[M].北京:人民交通出版社,1999.
[11]余军民,邵哲平.一阶船舶操纵运动模型动态仿真的研究[J].集美大学学报:自然科学版,2002,7(3):249-253.
[12]蒋维清.船舶原理[M].大连:大连海事大学出版社,2010.
[13]黄颖,李丽娜,李国定,陈国权.紧迫危险下减小碰撞损失的操船方法[J].大连海事大学学报,2013,39(3):17-21.
[14]熊振南,李丽娜,周伟.紧迫危险下的船舶智能避碰决策研究[J].中国航海,2009(4):39-43.
中图法分类号:U661.33
doi:10.3963/j.issn.2095-3844.2015.01.035
收稿日期:2014-08-20
Study on Simple Calculation Method of Ship's Maneuverability
IndexK,Tfor Large Rudder Angle
ZHANG BinLI GuodingLI LinaJIANG Jiao
(NavigationInstitute,JimeiUniversity,Xiamen361021,China)
Abstract:According to the formula of the ship to the new course of the distance, using mathematical methods the paper deduces the simple calculation method of maneuverability index K and T.And comparing with other existing methods, the index of K and T which are calculated by the simple method and zig-zag experimenton are leaded into the ship first-order linear response model for simulation.Then comparing with the cycle test data of ship intelligent handle and control simulation platform, verification cycle experiment concluded that when the steering angle is greater than or equal to 20 °, the simple calculation method has higher precision than zig-zag experiment. Therefore, the proposed simple calculation method has maneuverability and practicability for calculation ship maneuverability index K and T for large rudder angle.
Key words:ship maneuverability index; turning; zig-zag experiment;response model;multiple nonline-ar regression analysis
*国家自然科学基金项目(批准号:60774066)、福建省自然科学基金项目(批准号: 2012D031)资助