一种高精度车载定位终端系统的设计及测试分析*
2016-01-08郑洪江卢红洋
刘 建 郑洪江 卢红洋 陈 伟
(武汉理工大学信息工程学院1) 武汉 430070) (交通信息通信技术研究发展中心2) 北京 100011)
一种高精度车载定位终端系统的设计及测试分析*
刘建1,2)郑洪江1)卢红洋2)陈伟1)
(武汉理工大学信息工程学院1)武汉430070)(交通信息通信技术研究发展中心2)北京100011)
摘要:现有车载定位终端因车辆移动的特殊性和常规定位精度不足的问题,无法实现车辆安全行驶所要求的高精度定位.文中设计了一种基于WAVE标准的高精度车载定位终端系统设计方案,以车载网和地基增强系统为基础实现高速移动车辆的高精度定位,给出了硬件设计结构和软件设计流程,并完整地进行了通信性能、动态定位精度、跑车轨迹的测试.结果表明,该设计不占有现有移动通信频谱资源,具备高效、可靠的实时定位特点,可实现车辆高精度定位,提高行车安全性.
关键词:WAVE标准;高精度定位;车载通信;终端系统设计;测试分析
刘建(1975- ):男,博士生,主要研究领域为交通信息工程及控制、通信与信息系统
0引言
车载网(vehicular ad hoc networks,VANETs)是智能交通系统(intelligence transportation system, ITS)的基本组成部分,提供车与车(V2V)、车与基础设施(V2I)之间的相互通信,在事故预警、保障交通安全,以及优化交通流量等方面发挥了重要作用[1].随着专用短距离通信(DSRC)技术标准提出和逐步完善,车载网研究日趋成熟,其网络布设和实施已成为智能交通系统实现应用的必然发展趋势.尤其是美国已以车载环境下的无线接入(wireless access in vehicular environment, WAVE)通信协议[2]基础上,拟强制推行V2V 技术[3],这标志着智能交通系统将进入一个新的发展领域.
城市交通问题日益严峻[4],人们对车辆定位精度提出了更高的要求,如车辆高精度定位以实现车辆主动安全、车道级定位、超速监管等.现有普通GPS/北斗定位精度已无法满足人们的当前需求.而当前高精度定位技术,主要借助于3G/GPRS/GSM/CDMA进行参考站与固定/移动用户端之间修正信息传输,进而消除综合误差,实现用户端高精度定位,如网络RTK(real time kinematic)技术[4].但这种方式通信费用高昂,延时长,占用现有移动通信频带资源,比较适合固定点或缓慢移动终端高精度定位需求,如测绘、城市规划、市政建设、勘探等,很难满足车辆高速运动时通信定位特性.本文在考虑车辆高速移动特性以及对未来车载网设施的充分利用的基础上,设计了一种基于WAVE标准的高精度车载定位终端系统设计方案,通过WAVE技术完成车辆与路边基础设施间修正信号的实时接收,实现车辆的高精度定位,为车辆主动安全等应用提供实时保障.
1系统相关技术
1.1定位原理
本文所提出的定位终端系统应用于实时连续发布修正信号的路边设施和接收修正信号的车载用户端之间通信场景下,其定位原理是考虑北斗地基增强系统由若干个采用网络RTK技术的虚拟参考站网络(virtual reference station,VRS网络)构成,每个VRS网络中的主控站将生成的修正信息通过有线方式(如VPN光纤网)传送至该网络覆盖范围内的路边设施(如交通灯、电子站牌等),路边设施对修正信息重新编码,以WSM(wave short message)方式向用户实时连续发布,车载用户端通过本文提出的基于WAVE标准高精度车载定位终端接收WSM数据包,并进行解码,进而完成实时高精度定位.
1.2VRS技术
VRS技术,是网络RTK技术的一种,通过在一定区域均匀布设多个(3个或3个以上)永久性连续运行参考站,对该地区构成网状覆盖,在网络范围内完成修正信息的生成、传输,从而在用户端实现各项误差的消除获得高精度实时定位精度[5].测试结果表明,从用户选择网络并发出请求信息到控制中心发回改正数据,用户利用改正数据得到测量点位置的固定解,耗费的时间在30s左右[6].可见,这种定位方式占用已有的频带资源进行信息传递,且远远无法满足运行车辆的实时高精度定位需求.
1.3WAVE协议栈
WAVE协议是专为车载无线通信网络所设计[7],可满足车载通信高移动性和高实时性的需求,同时基于WAVE的应用更容易部署且成本更低,更符合商业模式需求.
WAVE协议标准包括IEEE 802.11p标准和IEEE 1609.X协议族[8].其中IEEE 802.11p定义了物理层和媒体访问控制层(MAC层),MAC层采用增强型分布式信道接入(EDCA)机制,物理层采用正交频分复用(OFDM)技术;IEEE 1609.X协议族主要为车辆环境下的V2V和V2I无线接入制定,在IEEE 802.11p标准的基础上规定相应的高层协议,制订了车载无线通信技术的指标和相关参数,描述了高速行车时短距离无线通信的运行机制.
2基于WAVE标准的高精度车载定位终端系统设计
本终端系统通过DSRC模块接收路边设施以WSM方式实时连续发布的修正信号,通过BDS模块接收来自卫星的定位信号,并将这些信息送入微处理器处理,获得车辆的高精度位置信息,实时、准确地完成各种定位服务功能,为交通车辆安全性提供保障.
2.1硬件结构
终端系统的硬件系统基于Freescale I.MX6开发板,采用ARM架构的Cortex A9处理器,主频1 GHz,512 MB DDR内存.终端系统主要包括DSRC模块、BDS模块、处理器CPU模块、LCD显示模块和接口模块5个部分,其结构见图1.

图1 终端系统硬件结构图
1) DSRC模块工作于5.850~5.925 GHz的频率范围内,支持IEEE 802.11p协议,传输速率达到27 Mbps,包含主控模块及射频模块;采用 NXP 公司的 TEF5100和SAF5100模块,主要完成修正信号的获取.
2) BDS模块选取司南K500板卡.主要完成BDS定位信号与同步时间的提取,对BDS信号进行解调和滤波处理,解算出BDS卫星的导航报文,获得车辆导航定位的位置、方向等数据.并与DSRC模块获取的修正信号融合,消除定位综合误差.
3) 处理器CPU模块采用ARM架构的Cortex A9处理器,它的串口分别同GPS/BDS模块、DSRC模块相连,外围电路有电源及LCD,能有效地完成相连器件之间数据的传输和控制,保证系统能正常而稳定地工作.
4) LCD显示模块通过VGA接口外接LCD显示屏,将DSRC接收到的修正信息与本车辆BDS采集的信息融合处理,处理后的精准位置信息反馈到LCD显示.
5) 接口模块通过开发板提供的接口实现各模块连接,完成模块间信息的传输.
2.2软件结构
软件设计主要包括系统初始化、BDS数据采集及处理、DSRC通信处理及其他功能等功能模块,包括一个无限循环的主程序和若干功能模块子程序.正常情况下主程序一直接收BDS卫星数据和修正数据并将其处理后应用,然后通过车载网络上传或播发,上传或播发的精准位置信息为车车主动安全等应用提供保障.
Freescale开发板采用嵌入式Linux系统.操作系统移植基于ARM A9处理器的 Linux 2.6.39 内核,完成进程管理、内存管理、文件系统、设备控制、网络实现,应用层程序通过调用标准接口对设备进行操作.系统整体软件工作流程见图2.

图2 软件系统流程图
3系统测试
3.1测试环境及测试参数配置
实际测试中采用司南M600作为基站,安装在标定的基准点,完成相关信号的接收、存储和转发.开发2套系统原型机,终端1安放在基准点位置,并通过串口与基站相连,通过USB接口与笔记本电脑相连.终端2安放在车辆上,通过CAN接口与车辆相连,通过USB接口与笔记本电脑相连,天线采用吸附式天线,部署于车顶.
整个系统测试过程分3步完成:(1) 通信性能,终端1与终端2之间在不同调制方式、不同速度、不同通信距离等条件下的通信速率及丢包率;(2) 静态定位精度,分别用K500,M600和终端2测量标定基准点位置并比较其各自误差;(3) 跑车轨迹,在基站附近直径约一公里范围的路段内采用M600轨迹作为参考依据评估终端2设备的动态定位精度.
测试参数配置见表1.
1) 通信性能测试终端1与终端2组成的通信系统的通信性能,包括不同调制方式、不同速度、不同通信距离等条件下系统的通信速率及丢包率,测试结果见图3.由图3a)可知,BPSK调制模式下系统的通信速率最低,在车辆静态时为2.2 Mb/s,而在车辆运动状态下仅1.6 Mb/s;QAM16调制方式下系统的通信速率最高,在静态和动态条件下分别达到11.2 Mb/s和8.9 Mb/s.由图3b)可知,车辆静止和运动状态下BPSK调制模式下的通信效果最佳;传输速率越高丢包越严重;车站间距越大,丢包现象越明显.因此,进行终端系统定位精度测试时差分信号传输选用BPSK调制模式.
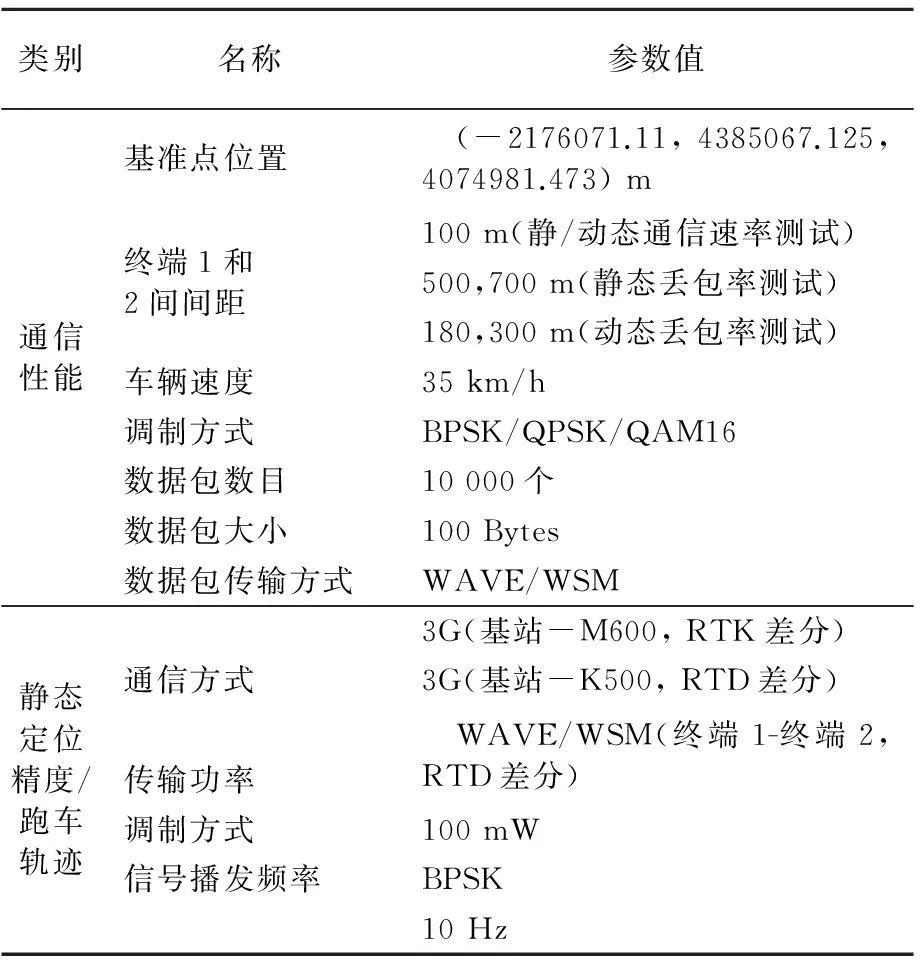
表1 测试参数设置

图3 系统通信性能
3.2测试结果分析
2) 静态定位精度本文采用圆概率误差(circular error probability,CEP)方法评估所设计终端的静态定位精度.进行数据采样获得的零基线条件下的定位水平误差结果见表2、图4.

表2 司南K500、M600、终端2定位水平误差

图4 K500,M600,终端2静态定位误差分布图
由表2和图4可知,以95%圆概率误差方法计算,M600定位精度最高,为毫米级,可以作为其他卫星导航设备定位精度评定的参考基准.相对来说,K500 RTD伪距差分方法定位精度较低,但K500采用3G方法接收RTD伪距差分信号时的定位精度与终端2采用WSM方式接收RTD伪距差分信号时的定位精度相差无几,都能较好的实现高精度定位.
3) 跑车轨迹以M600轨迹为参考基准,测量得到的跑车轨迹及误差结果见表3、图5~6.
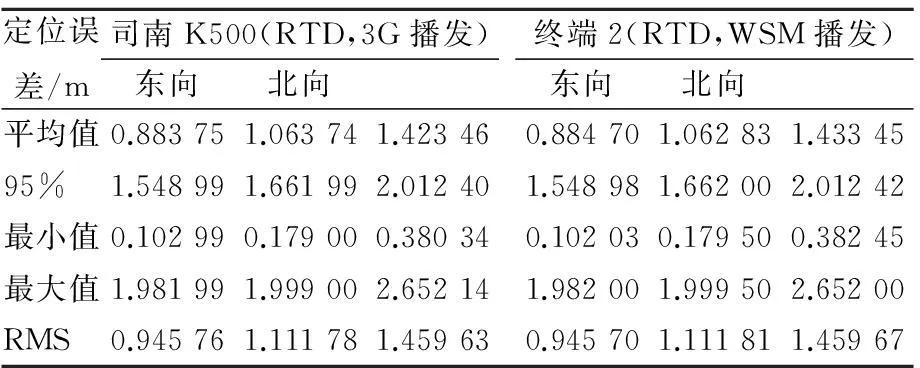
表3 K500、终端2相对于M600的动态定位精度

图5 跑车轨迹
图5中K500,终端2与M600的轨迹之间有一个基本固定的偏差,K500与终端2两者行进轨迹几乎一致;图6中K500和终端2相对于M600的RMS(root-mean-square)误差曲线除距离基站较远距离的少数轨迹点略有偏差外,其余几乎相同.可知,WSM方式完全可以实现3G方式的定位效果,且在车载网络布设完全的情况下,共用车载网实现车辆精准定位而完全不占用现有紧张的移动频带资源.

图6 K500、终端2相对于M600的动态误差
4结束语
本文所提出的基于WAVE标准的高精度车载定位终端系统以车载网和地基增强系统为基础实现高精度定位,在通信技术上利用车载网传递修正信息,既可以充分利用车载网和地基增强系统技术及其基础设施,无需重复建设通讯基站和网络,又不占用有限的移动频带资源.在实际车载环境中的测试验证结果表明,该系统终端具备实施周期短、覆盖范围广、通讯误码率低、高效、可靠的实时定位等特点,具有较大的实用价值和非常广阔的市场应用前景.
参 考 文 献
[1]刘委婉,陈志佳,刘南杰,等.VANET 中基于碰撞概率和过期概率的自适应退避算法研究[J].电信科学,2014(3):94-99.
[2]MORGAN Y L.Notes on DSRC & WAVE standards suite: its architecture, design, and characteristics[J].IEEE Communications Surveys & Tutorials,2010,12(4): 504-518.
[3]郝扬.马路杀手福音,美政府拟强制推行V2V 技术[EB/OL].[ 2014-8-19].http:∥www.ifanr.com/444102.
[4]祁首铭,胡立伟,孙亚南,等.城市核心区主干路交通拥塞演变规律分析[J].武汉理工大学学报:交通科学与工程版,2014,38(5):1152-1157.
[5]李成钢.网络GPS/VRS系统高精度差分改正信息生成与发布研究[D].成都:西南交通大学,2007.
[6]张琼,王建文.VRS技术原理及网络RTK在城市规划测量中的应用[J].测绘与空间地理信息,2008,31(4):63-65.
[7]UZCATEGUI R,ACOSTA-MARUM G.Wave:a tutorial [J]. IEEE Communications Magazine,2009,47(5):126-133.
[8]KARAGIANNIS G,ALTINTAS O,EKICI E,et al.Vehicular networking: a survey and tutorial on requirements,architectures, challenges,standards and solutions[J].IEEE Communications Surveys & Tutorials,2011,13(4):584-616.
中图法分类号:U491.6
doi:10.3963/j.issn.2095-3844.2015.01.012
收稿日期:2014-11-24
Design and Testing Analysis of A High Precision
Vehicular Positioning Terminal System
LIU Jian1,2)ZHENG Hongjiang1)LU Hongyang2)CHEN Wei1)
(SchoolofInformationEngineering,WuhanUniversityofTechnology,Wuhan430070,China)1)
(TransportInformation&CommunicationTechnology
ResearchandDevelopmentCenter,Beijing100011,China)2)
Abstract:Existing vehicle terminals are unable to achieve high-precision positioning due to the particularity of vehicle movement and the lack of accuracy of conventional positioning methods. This paper designs a high-precision vehicular positioning terminal system design scheme based on WAVE standards, and gives the hardware structure and software design process. This system achieves high-precision positioning of high-speed mobile vehicles with the foundation of vehicular ad hoc networks and ground-based augmentation system. Finally, a complete testing is carried out, including communication performance, dynamic positioning accuracy, and vehicle movement trajectory. The results show that this scheme doesn't occupy the existing mobile spectrum resources and has highly efficient and reliable real-time positioning characteristics. Therefore, it can realize vehicle active high precision positioning and improve the security of driving.
Key words:WAVE standards; high precision positioning; vehicular communication; terminal system design; testing analysis
*国家高技术研究发展计划(863)(批准号:2013AA122403)、交通运输部西部建设科技项目(批准号:2012-344-X11-803)资助