动态失速对直升机前飞平衡特性的影响研究
2015-12-28柳泉胡国才徐广
柳泉,胡国才,徐广
(海军航空工程学院 飞行器工程系,山东 烟台264001)
0 引言
目前,在进行直升机平衡特性计算时采用的桨叶翼型气动模型主要有两种:准定常静态失速模型和非定常动态失速模型。Howlett[1]建立了UH-60A直升机动力学模型,利用二维翼型吹风数据(准定常静态失速模型)进行旋翼的气动力计算。Theodore[2]在进行直升机飞行动力学建模时也采用了准定常静态失速模型。宋辰瑶[3]将非定常动态失速模型用于旋翼旋转噪声的研究。李攀[4]建立了一种集成非定常动态失速模型的高置信度直升机飞行动力学模型,但缺少动态失速对直升机平衡特性的影响分析。
翼型动态失速模型主要有 Johnson模型[5]、ONERA 模型[6]和 Leishman-Beddoes 模型[7]等。其中,Leishman-Beddoes模型由于方法简单直观,涉及的经验参数少,适用于时域求解而得到广泛应用。
本文将建立UH-60A直升机飞行动力学模型,其中桨叶翼型气动模型分别采用准定常静态失速模型和Leishman-Beddoes非定常动态失速模型,通过数值计算得到直升机不同飞行速度下的配平值,并将两者的计算结果与飞行测试数据进行对比,分析动态失速对直升机平衡特性的影响。
1 旋翼气动力计算
1.1 叶素速度及迎角
考虑到动态失速区域与桨叶方位角及径向位置有关,采用空间离散的思想划分旋翼桨盘。其中,周向采用均匀划分准则,径向采用等圆环面积法作为划分准则。桨叶模型以叶素理论为基础,每片叶素的速度由机体运动速度、桨叶运动速度和旋翼诱导速度三部分确定,通过坐标转换得到叶素的速度分量及当地马赫数。
第i片桨叶第j段叶素的切向、垂向和径向的来流速度可由以下函数形式表示:

式中:μx,y,z为旋翼前进比;p,q,r为机体角速度;Ω 为旋翼转速;vi为旋翼诱导速度;βi,ζi分别为第i片桨叶的挥舞角和摆振角;ψi为第i片桨叶的方位角。
该叶素的迎角可表示为:
也有研究者认为寨卡病毒感染导致神经系统损伤有可能是由于免疫交叉反应所导致的。Lucchese等[31]通过研究发现寨卡病毒的部分蛋白多肽在人类中也有表达,如小头畸形、脑组织钙化和吉兰-巴雷综合征相关的一些蛋白多肽,并且通过查询免疫抗原决定簇(IEDB)发现,许多共有的多肽具有免疫原性,当寨卡感染人体引发免疫反应后,可同时针对人体内共同存在的蛋白多肽发生免疫交叉反应,从而导致神经系统的损伤。

式中:θi为第i片桨叶的扭转角。
1.2 翼型气动模型
采用准定常静态失速模型和非定常动态失速模型两种不同的翼型气动模型计算叶素翼型的升阻系数:
(1)准定常静态失速模型
本文采用的准定常静态失速模型取自文献[1],文中通过风洞静态试验得到SC1095翼型在不同马赫数条件下的升阻特性。根据叶素所处位置的当地马赫数和迎角进行二维插值得到该叶素的翼型升阻系数。以Ma=0.3为例,翼型升阻系数随迎角的变化曲线如图1、图2中的虚线所示。
(2)非定常动态失速模型
Leishman-Beddoes动态失速模型计算得到的翼型升阻系数是关于迎角在不同马赫数下的动态响应[8]。由式(2)可以计算得到方位角变化一周的叶素迎角,由叶素迎角及当地马赫数计算得到翼型升阻系数随迎角变化的动态响应,然后根据叶素所处位置的方位角得到该叶素翼型的升阻系数。以Ma=0.3为例,翼型升阻系数随迎角的变化曲线分别如图1和图2中的实线所示。
由图可知,翼型发生动态失速时,其升阻系数随迎角的变化呈现迟滞特性,对旋转桨叶气动力来说将呈现非定常特性。显然,采用静态失速模型无法反映出动态失速时的非定常气动特性。
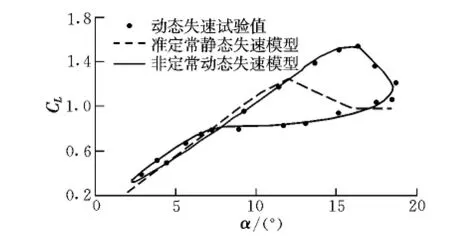
图1 升力系数随迎角变化曲线Fig.1 Lift coefficient at different angle of attack
2 直升机飞行动力学建模
以铰接式旋翼直升机为例,建立了以旋翼挥舞、摆振模态表示的二阶动力学模型[9],旋翼入流采用Pitt-Peters动态入流模型[10],模拟入流的动态响应特性。
单片桨叶的载荷由气动力和惯性力组成,将所有桨叶的载荷进行累加可得到旋翼总载荷。机身、平尾和垂尾的气动载荷与当地马赫数、迎角有关,可通过插值得到。尾桨气动力采用Bailey模型[11]计算。得到直升机的非线性状态方程组:

式中:X为状态向量,包括机体线速度、机体角速度、机体姿态角等 27 个分量;U=[θ0,θc,θs,θtr]为旋翼总距、横向周期变距、纵向周期变距和尾桨总距操纵输入。
3 平衡特性计算与分析
3.1 计算方法
直升机在定常飞行条件下,其三个线加速度和三个角加速度均为零。但是由于存在旋翼高频载荷的激振作用,机体存在高频振动。因此,加速度实际上是在周期平均意义上为零,可表示为:

以旋翼稳态解的周期性为条件,采用全局伽辽金法[12]将桨叶动力学方程转换为非线性代数方程组,避免可能存在的旋翼周期稳态解不稳定的影响,这样旋翼的平衡方程可表示为:

使入流状态量变化率的周期平均为零,可得到入流平衡方程为:

将以上代数方程组表示成矩阵的形式:


3.2 计算结果与分析
以UH-60A“黑鹰”作为样例直升机,其全机、旋翼、尾桨和尾翼的具体数据取自文献[1],飞行测试数据取自文献[13]。分别采用两种桨叶翼型气动模型,计算得到UH-60A直升机在不同飞行速度下的配平值,并将两种模型的计算结果与飞行测试数据进行对比,分析不同的桨叶翼型气动模型对直升机平衡特性的影响。直升机飞行高度为1 600 m,飞行速度范围为0~160 kn,飞行重量7 547 kg。为了便于与飞行测试数据进行对比,驾驶员操纵输入以总距杆、驾驶杆和脚蹬行程百分比的形式给出。计算结果及飞行测试数据如图3~图8所示。
由图3~图8可以看出,在0~80 kn飞行速度范围内两种模型的计算结果比较接近,这说明在该飞行速度范围内桨叶并没有发生动态失速,但在0~40 kn飞行速度范围内两种模型的计算结果与飞行测试数据有较大差距,这是由于本文在建立直升机飞行动力学模型时采用了动态入流模型作为旋翼的尾迹模型,该模型在计算直升机低速飞行状态下的诱导速度时存有不足[14]。在80~160 kn飞行速度范围内,两种模型的计算结果出现分离,并随前飞速度的提高两者分离的趋势更加明显,这说明在该飞行速度范围内桨叶发生了动态失速,随着前飞速度的提高,桨叶动态失速更加严重。从计算结果可以发现,在桨叶出现动态失速的定常飞行状态下,采用Leishman-Beddoes非定常动态失速模型,旋翼和尾桨操纵量、机身姿态角的计算结果更接近飞行测试数据。

图3 总距杆位置随速度变化曲线Fig.3 Collective lever position at different velocities

图4 驾驶杆纵向位置随速度变化曲线Fig.4 Longitudinal stick position at different velocities

图5 驾驶杆横向位置随速度变化曲线Fig.5 Lateral stick position at different velocities
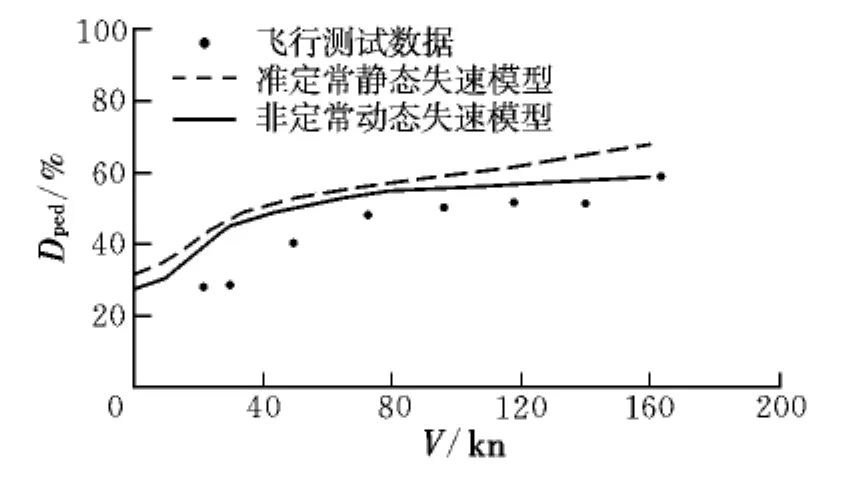
图6 脚蹬位置随速度变化曲线Fig.6 Pedal position at different velocities

图7 滚转角随速度变化曲线Fig.7 Roll angle at different velocities

图8 俯仰角随速度变化曲线Fig.8 Pitch angle with different velocities
4 结束语
采用静态失速和Leishman-Beddoes动态失速两种不同的桨叶翼型气动模型,对UH-60A直升机进行了平衡特性计算,并与飞行测试数据进行了对比分析。发现两者的平衡特性计算结果总体上与飞行测试数据吻合。低速飞行时,旋翼桨叶尚未出现动态失速现象,两者的平衡特性非常接近;高速飞行时,由于桨叶发生动态失速,采用不同的桨叶翼型气动模型得到的平衡特性出现一定差异,用动态失速模型得到的平衡特性更接近飞行测试数据。因此,在桨叶出现动态失速的定常飞行状态下,采用非定常动态失速模型计算直升机平衡特性具有更高的精度。
[1] Howlett J J.UH-60A Black Hawk engineering simulation program[R].NASA-CR-166309,1981.
[2] Theodore CR.Helicopter flight dynamics simulation with refined aerodynamic modeling[D].College Park,Maryland:University of Maryland,2000.
[3] 宋辰瑶.基于尾迹分析的旋翼旋转噪声计算及桨-涡干扰噪声研究[D].南京:南京航空航天大学,2010.
[4] 李攀.旋翼非定常自由尾迹及高置信度直升机飞行力学建模研究[D].南京:南京航空航天大学,2010.
[5] Johnson W,Ham N D.On the mechanism of dynamic stall[J].Journal of American Helicopter Society,1972,17(4):36-45.
[6] Tran CT,Falchero D.Application of the ONERA dynamic stall model to a helicopter rotor blade in forward flight[C]//Seventh European Rotorcraft Forum.Garmisch Partenkirchen,Germany,1981:22-25.
[7] Leishman J G,Beddoes T S.A generalized model for airfoil unsteady aerodynamic behavior and dynamic stall using the indicial method[C]//Forty-Second Annual Forum of the American Helicopter Society.Washington D C,USA,1986:243-265.
[8] 柳泉,胡国才,贾忠湖,等.直升机旋翼翼型动态失速仿真研究[C]//第30届飞行力学与飞行试验学术交流年会.西安,2014:34-39.
[9] Gareth D P.Helicopter flight dynamics[M].UK:Blackwell Science Ltd,1996:134-142.
[10] Pitt D M,Peters D A.Theoretical prediction of dynamic inflow derivatives[J].Vertica,1981,5(1):21-34.
[11] Bailey F J.A simplified theoretical method of determining the characteristics of a lifting rotor in forward flight[R].NASA-TR-716,1941.
[12] Celi R.Effects of hingeless rotor aeroelasticity on helicopter longitudinal flight dynamics[J].Journal of the American Helicopter Society,1991,36(1):35-44.
[13] Ballin M G.Validation of a real-time engineering simulation of the UH-60A helicopter[R].NASA-TM-88360,1987.
[14] Kothmann B D,Keller J D,Curtiss H C.On aerodynamic modeling for rotorcraft flight dynamics[C]//Twenty-Second European Rotorcraft Forum.Brighton,UK,1996:1-14.
