鸭舵位置参数对弹箭滚转特性的影响
2015-12-26陈少松倪金付
薛 明,陈少松,倪金付
(南京理工大学 能源与动力工程学院,南京210094)
鸭式布局弹箭当鸭舵做副翼偏转进行滚转控制时,从鸭舵后缘拖出的涡在尾翼处形成不对称洗流场,诱导出一个与鸭舵滚转控制力矩方向相反的力矩[1]。该反向滚转力矩减小甚至抵消了鸭舵产生的滚转力矩,这使得鸭舵不能有效地进行横滚控制。为了研究鸭舵下洗的规律,前人采用风洞实验的方法,研究了鸭舵的轴向位置[2]、鸭舵相对尾翼的展长比[3]、鸭舵前缘后掠角、尾翼结构布局等对鸭式布局弹箭滚转控制特性的影响。总结出“断牙”鸭舵、双鸭舵、自旋尾翼[4]、环形尾翼和T型尾翼等布局结构,有利于克服鸭舵下洗,能够有效地进行滚转控制。其原理主要体现在以下三个方面:一是让鸭舵拖出的涡系尽早破裂,使其不能在尾翼上产生或减弱产生面不对称的法向力,从而在尾翼上不产生或减弱诱导滚转力矩;二是让尾翼上产生的诱导滚转力矩与弹身解耦,使尾翼上的诱导滚转力矩不能传递到弹身上,从而不会影响鸭舵的滚转控制;三是使得尾翼上产生的法向力通过轴心,使之不能产生诱导滚转力矩。目前,应用比较广泛的是采用自旋尾翼结构,自旋尾翼是用轴承连接弹身与尾翼,使得尾翼上的滚转力矩不传递到弹身上。当导弹舵面做滚转偏转时,采用自旋尾翼和环形翼面均能减小诱导滚转力矩,获得较大的滚转操纵效率。但大直径火箭弹的情况下,支撑自旋尾翼的轴承太重使得火箭弹重心后移,能承受的最大过载较低,且在飞行过程中轴承还可能出现卡滞现象;环形翼面阻力太大,纵向气动性能降低。因此仍有必要对鸭式布局弹箭鸭舵下洗涡诱导尾翼产生反向滚转力矩的机理进行研究,但其较为复杂,本文采用数值计算的方法,研究了鸭式布局弹箭舵尾间距以及鸭舵安装位置对其滚转控制特性的影响,分析了鸭舵后下洗涡、流线随鸭舵位置参数的变化,得到了尾翼上诱导的反向滚转力矩变化规律,为进一步研究提供参考。
1 数值计算方法
本文针对图1所示的鸭式布局火箭弹进行研究,该布局的4片鸭舵与6片尾翼均呈“X-X”式布局,一对鸭舵差动10°,根据舵尾间距和鸭舵安装位置的不同,设计了3个研究模型。定义舵尾间距为鸭舵后缘根弦点和尾翼前沿根弦点在弹轴上投影点的距离。H1模型的鸭舵布局如图1所示,舵尾间距为21.7d(d为最大弹径);H2模型的舵尾间距为15d,鸭舵和尾翼布局结构不变,只缩短弹体圆柱段长度;H3模型是在H1模型基础上,将鸭舵从圆锥段上移到圆柱段上,其余布局均不改变。分别对上述模型进行了数值计算,研究了舵尾间距与鸭舵安装位置对滚转特性的影响。网格采用由下到上的方法生成结构化网格,近壁面均加密处理,图2为模型局部网格示意图。

图1 模型状态图

图2 网格示意图
方程及边界条件:数值计算采用积分形式的N-S方程[5-6]。

式中:Q=(ρρuρvρwρe)T,F=Fc-Fv。
矢量H为源项;v=ui+vj+wk;ρ,u、v、w,e,p分别为密度、直角坐标系下速度分量、单位质量的总能和流体压强;τ为粘性应力张量;q为热流通量(τ与q的分量形式可参考文献),p与e的关系由理想气体状态方程给出:

本文采用较为简单的S-A湍流模型,S-A模型是一个单方程模型,主要求解一个有关涡粘性的输运方程,适用于具有壁面限制的流动问题,对有逆压梯度的边界层问题能够得到良好的计算结果,常用于翼型、飞行器绕流等空气动力学问题中。
边界条件:壁面边界取无滑移的绝热固壁,外边界取远场边界条件,即无反射边界条件。
计算区域为包含模型的圆柱型区域,其径向半径均为6.75d(d为最大弹径),考虑到超音速与亚音速其影响区的不同,超音速时前场取0.338d,后场取5.07d,网格数约为280万;跨音速时前后场均为15.2d,网格数约为320万。攻角α分别为0°,2°,4°,6°,8°。来流参数见表1,表中p∞为来流动压,T为来流静温。

表1 来流参数
2 舵尾间距对滚转特性的影响
图3给出了α=4°时H1和H2模型滚转力矩系数Cl随Ma变化曲线图,从图中看出,H1模型的滚转力矩系数Cl曲线均在H2模型的上方,在亚跨音速阶段先减小后增大,两者均在Ma=0.9左右达到最小值,在Ma=1.5左右达到最大值,当Ma>1.5以后,随马赫数增加,Cl先减小后缓慢增大。图4给出了Ma=0.8时Cl随α的变化曲线图,两者变化规律基本一致,在0°~4°时随攻角增加而增大,4°~8°时曲线基本持平。从图3和图4看出,H1模型的滚转控制能力在所有Ma下都比H2模型的强,即随着舵尾间距的增加,弹箭的滚转控制能力是增加的。
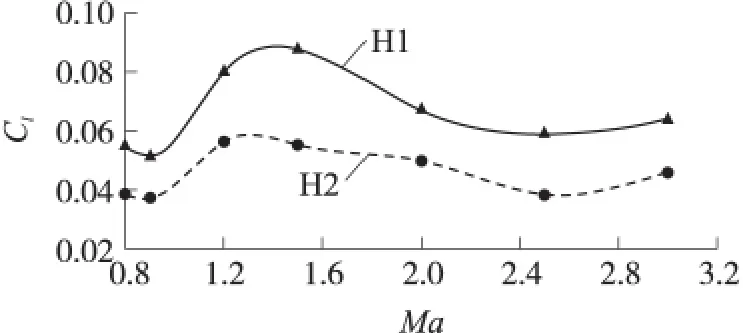
图3 α=4°时H1和H2模型Cl随Ma的变化曲线
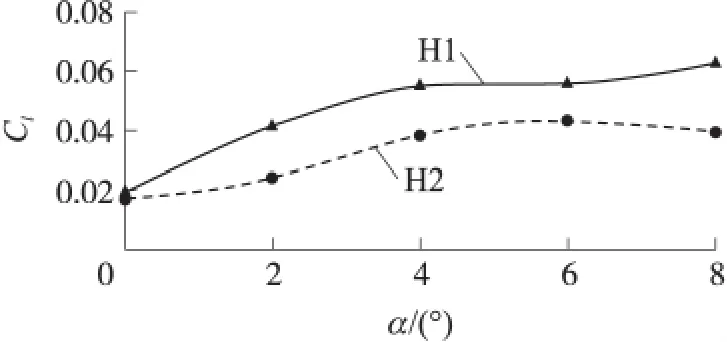
图4 Ma=0.8时H1和H2模型Cl随α的变化曲线
图5 给出了α=4°时尾翼上诱导的滚转力矩系数Clt随马赫数变化的曲线,其负值表示与鸭舵滚转控制方向相反。可以看出,H1的Clt曲线在所有Ma下均在H2上方,即随着舵尾间距的减小,尾翼上的诱导反向滚转力矩数值上是增大的。图6给出了α=4°时弹身上诱导的滚转力矩系数Cls随马赫数的变化曲线。可以看出,Cls同为负值且数值接近,但与尾翼的反向滚转力矩相比,其量级较小,对全弹滚转力矩的影响几乎可以忽略。
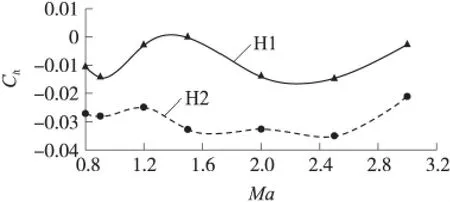
图5 α=4°时H1和H2模型的Clt随Ma的变化曲线
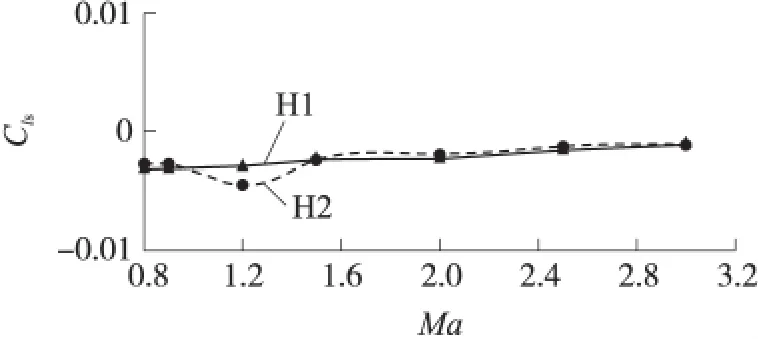
图6 α=4°时H1和H2模型的Cls随Ma的变化曲线
综合以上分析可得:随着舵尾间距的增加,尾翼上诱导的滚转力矩系数绝对值减小,鸭舵的滚转控制能力有所提高。
为分析鸭舵后下洗流对尾翼的作用机理,图7给出了Ma=2.0和α=0°时H1模型鸭舵后缘流线图,当一对鸭舵偏转进行顺时针滚转控制时,偏转的鸭舵后缘拖出了一对涡系,使得鸭舵后的流场不再对称分布,该下洗涡系作用在尾翼上,使得图7右上方与左下方的尾翼增加一个附加攻角,使得该两片尾翼两边产生压强差,该压强差对弹轴取矩在尾翼上产生了诱导滚转力矩,该滚转力矩的方向与鸭舵滚转控制方向相反。
图8分别给出了H1与H2模型在Ma=2.0和α=4°时从鸭舵后缘到尾翼的流线图。可以看出,在舵偏角与攻角的影响下,偏转的鸭舵后缘拖出螺旋形的尾迹流向尾翼。对比两图中尾翼处的流线可以发现,从鸭舵后缘拖出的流线在尾翼处大部分均在背风区,图8(a)中的流线基本都在背风区两尾翼片之间的区域,且偏向尾翼上方,图8(b)的流线不只是在翼片之间的区域,还分布在两侧的区域,且浸润尾翼面的区域比图8(a)所示的大,即舵尾间距减小鸭舵下洗对尾翼的影响程度大,尾翼上由于鸭舵下洗而产生的诱导滚转力矩系数绝对值大,鸭舵的滚转控制能力将下降。

图7 Ma=2.0和α=0°时H1鸭舵后缘流线图
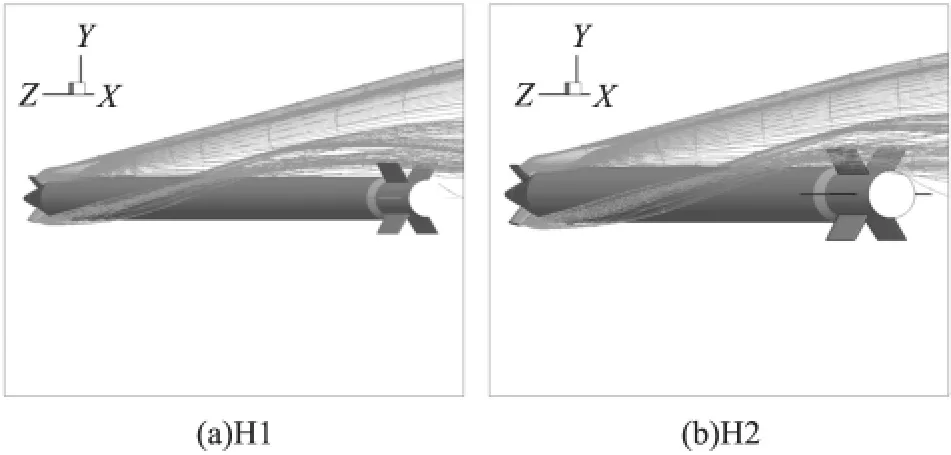
图8 Ma=2.0和α=4°时舵面到尾翼的流线
图9 与图10分别给出了在α=4°时Ma=0.8和Ma=2.0情况下,尾翼半根弦长剖面流场后视图。
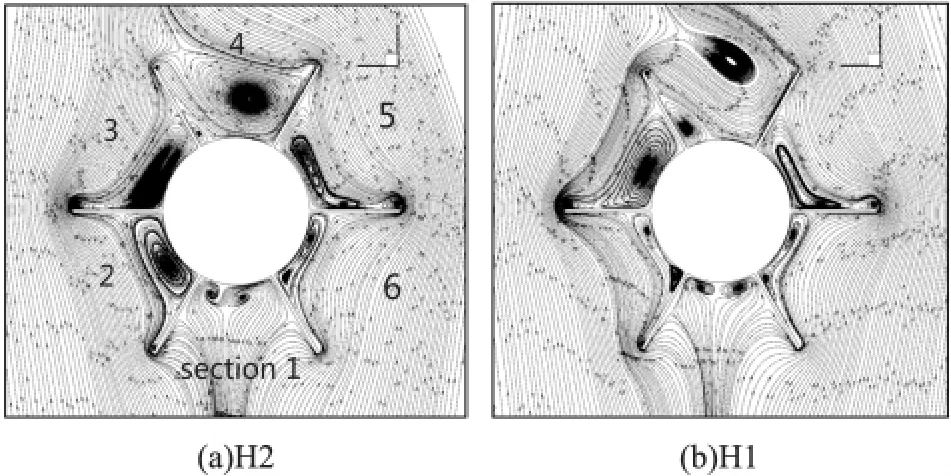
图9 Ma=0.8,α=4°时尾翼截面流场图

图10 Ma=2.0,α=4°时尾翼截面流场
为便于表述,将尾翼各翼片之间的区域编号如图9(a)所示。对比模型H2和模型H1的流线图,可以看出,H2模型的涡系较H1模型复杂,涡系的影响区域较大,不对称性更为严重。4区涡系随着向尾翼方向的逐渐发展,左侧涡逐渐发展,左侧翼片的对称性加强,右侧涡核向翼尖处移动,逐渐跑出该区域,对右侧翼片的不对称性影响减弱。从图9和图10可以看出,两模型尾翼上的不对称均表现为产生逆时针方向的滚转,随舵尾间距的增大,尾翼受不对称洗流影响区域减小,故H1模型的尾翼滚转力矩系数Clt绝对值比H2模型的小。对比图9和图10还可以看出,跨音速下相同模型鸭舵对尾翼下洗影响的程度比超音速时严重,流场表现的不对称性更强烈,势必造成尾翼受下洗影响程度较超音速更大。
3 鸭舵安装位置对滚转特性的影响
为了研究鸭舵置于圆柱段后对滚转控制特性的影响,在H1基础上设计了H3模型,该模型的鸭舵置于紧靠头部圆锥根部的圆柱段上,其余布局不变。图11给出了α=4°时H1与H3滚转力矩系数Cl随Ma的变化曲线图,从图中可以看出,两模型的滚转力矩系数Cl在亚跨音速和低超音速下差异较大,在亚音速和低超音速阶段,H3模型的滚转力矩系数小于H1模型的,在跨音速阶段H3模型的差动滚转控制能力比H1模型的强,在超音速段几乎相同。分析造成这种变化的原因主要是:两模型鸭舵的差动控制能力不同;尾翼受鸭舵下洗影响的程度不同,则诱导产生的反向滚转力矩也不同;弹身受下洗影响的程度不同。图12给出了α=4°时两模型鸭舵的滚转力矩系数Clc随马赫数的变化曲线,从图中可以看出,亚音速时H3模型鸭舵的差动滚转控制能力低于H1模型,在跨音速和低超音速段,H3模型鸭舵的差动滚转控制能力大于H1模型,而在超音速阶段两模型鸭舵的差动滚转控制能力基本相同。鸭舵差动滚转控制能力的差异主要与鸭舵所处位置受到其它部件干扰有关,H1模型鸭舵处于模型头部圆锥上,在亚跨音速甚至低超音速阶段鸭舵后部区域流速都是亚音速的,头部圆锥会对鸭舵绕流场产生阻挡干扰,造成鸭舵差动能力下降,而H3模型后面却没有这种阻挡干扰,所以差动能力比H1模型强。
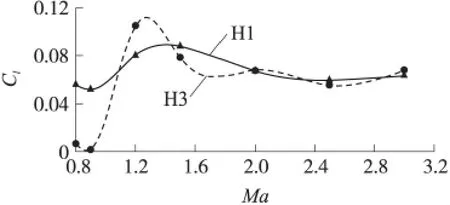
图11 α=4°时H1和H3模型的Cl随Ma的变化曲线

图12 α=4°时H1和H3模型的Clc随Ma的变化曲线
图13 给出了α=4°时因鸭舵下洗在尾翼上诱导产生的滚转力矩系数Clt随马赫数的变化曲线。可以看出,两模型的诱导滚转力矩系数均为负值,在亚跨音速和低超音速阶段H3模型尾翼反向滚转力矩比H1模型的更大,而在超音速阶段两者基本相同,出现这种现象的根本原因是鸭舵位置处于圆柱段后,鸭舵下洗影响更为强烈。
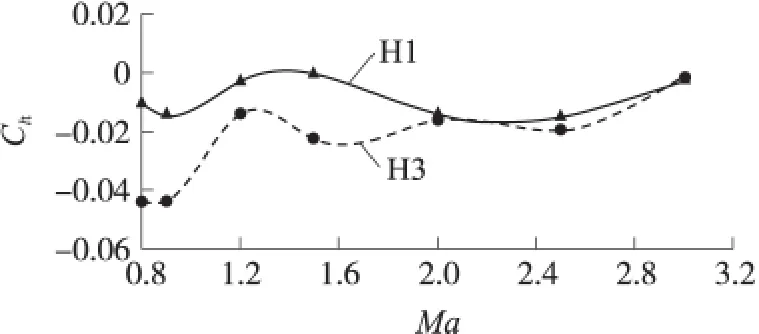
图13 α=4°时H1和H3模型的Clt随Ma的变化曲线
图14 给出了α=4°时因鸭舵下洗在弹身上诱导产生的滚转力矩系数Cls随马赫数的变化曲线。从图中可以看出,该滚转力矩系数同样为负值,H3模型的Cls绝对值均大于H1模型的,但与Clt相比,其量级很小,对全弹滚转力矩的影响几乎可以忽略。
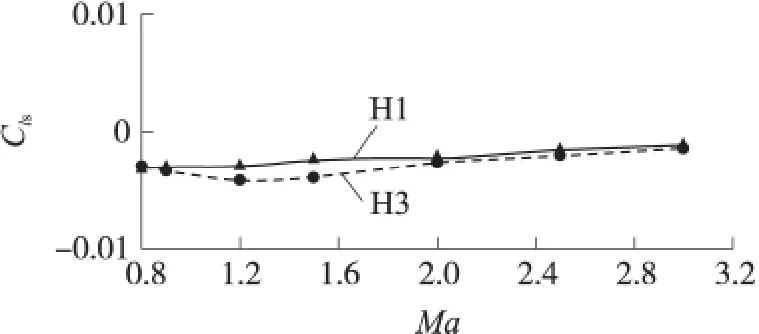
图14 α=4°时H1和H3模型的Cls随Ma的变化曲线
图15 给出了H3模型在α=4°且Ma=0.8和Ma=2.0时尾翼半根弦长截面处的流场图。对比图15(a)与图9(b)中H1模型该处的流线图可以发现,H3模型在背风区(4区)涡核强度变大,5区在右侧翼面上的涡强更强,这些都导致了H3模型因鸭舵下洗流诱导产生的反效滚转力矩更强;图15(b)与图10(b)对比发现,两个模型流线图基本没有变化或变化很小,所以鸭舵下洗在尾翼上诱导的反效滚转力矩基本相同。
图16给出了Ma=1.2,α=4°时H1与H3尾翼截面流线图,当鸭舵位置从圆锥段移动到圆柱段,2区涡强度增加,3区、背风区以及5区涡强度减弱。综合鸭舵差动滚转控制能力和鸭舵下洗在尾翼上诱导滚转力矩的情况,可以清楚地看出两模型的滚转力矩系数就应该按图10所示的规律进行变化。
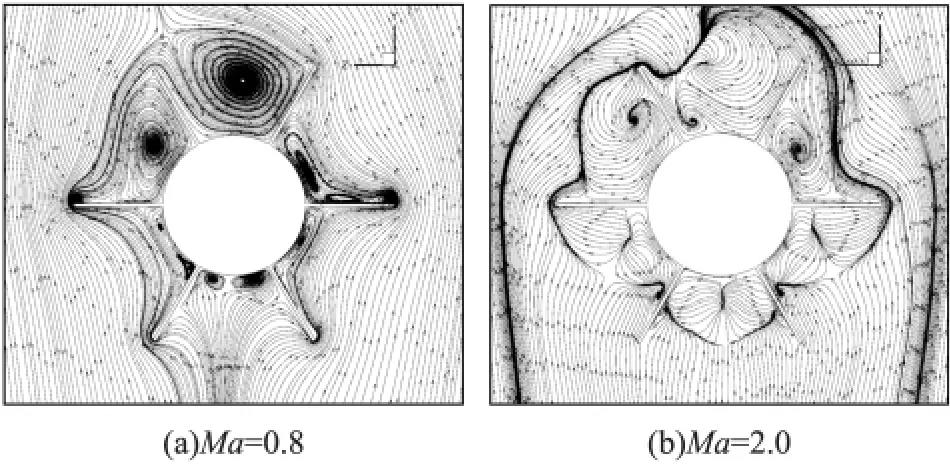
图15 α=4°时H3模型尾翼截面流线图
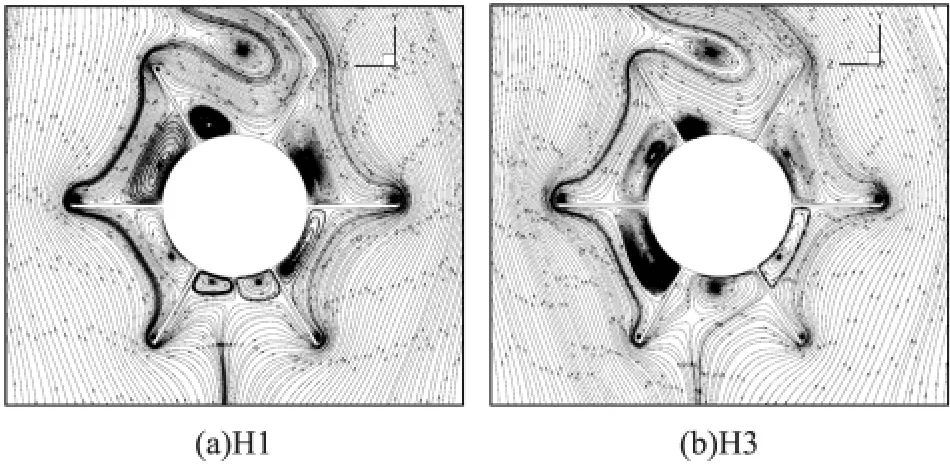
图16 Ma=1.2且α=4°时尾翼截面流线图
4 结论
通过数值计算分析了鸭式布局弹箭舵尾间距以及鸭舵安装位置对鸭舵差动滚转控制的影响,得到以下结论:
①鸭式布局弹箭鸭舵差动时,会在弹身和尾翼上诱导反向的滚转力矩。弹身上诱导的反向滚转力矩量值小,且随速度变化不大。尾翼上诱导的反向滚转力矩是主要的,该反向滚转力矩在亚跨音速和低超音速时较超音速数值更大。
②鸭式布局的舵尾间距对鸭舵滚转控制特性有较大的影响,随着舵尾间距增加,鸭舵不对称洗流对尾翼的影响减小,尾翼上诱导的反向滚转力矩减小,对提高鸭舵的滚转控制有利。
③鸭舵置于圆柱段较安置在圆锥段时,鸭舵的滚转控制能力在跨音速得到提升,在亚音速和低超音速都有所下降,超音速时几乎不变。
[1]吴甲生,雷娟棉.制导兵器气动布局与气动特性[M].北京:国防工业出版社,2008.WU Jia-sheng,LEI Juan-mian.Aerodynamic configuration and aerodynamic characteristic of guided weapons[M].Beijing:National Defense Industry Press,2008.(in Chinese)
[2]BURT J R.The effectiveness of canards for roll control,AD/A 037077[R].1976.
[3]GUY Y,MORROW J A.The effects of canard shape on the aerodynamics characteristics of a generic missile configuration,AIAA 99-4256[R].1999.
[4]BLAIR A B.Wind-tunnel investigation at supersonic speeds of a canard-controlled missile with fixed and free-rolling tail fins[M].USA:NASA,1978.
[5]阎超.计算流体力学方法及应用[M].北京:北京航空航天大学出版社,2006.YAN Chao.Computational fluid dynamics method and application[M].Beijing:Beijing University of Aeronautics and Astronautics Press,2006.(in Chinese)
[6]ANDERSON J D.Fundamentals of aerodynamics(fifth edition)[M].USA:Mc Graw Hill,2014.
