基于输入输出数据的非线性系统建模
2015-12-25张旭
张 旭
(中国电子科技集团公司第二十研究所,陕西 西安 710068)
0 引言
线性系统建模方法虽然对于线性系统具有很好的效果。随着控制过程要求的不断提高,相对于一个线性模型在当前工作点的局部近似,非线性模型能更好地描述过程在整个运行过程的整体特性,在实际应用中具有很好的效果。模块化非线性模型是一种非线性模块与线性子系统的串联型的模型,由于其结构清晰,并能描述常见的非线性系统,所以得到了广泛地关注与应用[1-2]。
近年来,对于模块化非线性Hammerstein 型的辨识文献相对较多。Narendrad 等[3-4]提出了迭代方法,将参数化为线性模块参数和非线性模块参数两个集合,计算一个参数集最优估计值时固定另一个,两参数集估计轮换计算,但两个参数集之间的链接矩阵是一个输入变量的函数矩阵,由此导致迭代最小二乘法的协方差矩阵计算量大。Chang等[5]提出了过参数辨识方法,是把非线性展开为一些基函数的和,经参数化后得到一个过参数化模型,然而得到的模型参数向量包含了原始的静态非线性模块与线性模块参数的乘积,使得参数向量维数大大增加,导致算法计算量相应增加。Pawlak[6]给出随机方法,利用白噪声性质分离线性部分与非线性部分。Bai 等[7-8]给出了分离最小二乘法、盲辨识和频域辨识法。
为此,本文利用正交基辨识法对输入非线性模型(Hammerstein-型)进行建模,其优点是避免了迭代算法以及参数向量维数增大所带来的计算量,对于正交基函数的获取进行改进,对输入输出数据做特殊处理,仅利用利用输出信号恢复中间变量,最终利用最小二乘法得到模型参数,仿真结果表明了方法有效性。
1 输入型非线性系统建模
1.1 输入型非线性系统描述
Hammerstein 模型是一种输入端具有非线性的串联型非线性系统模型图1 所示,被应用于许多工程问题中。考虑离散的Hammerstein型系统,建模的目的是仅基于输入数据u 输出数据y,估计线性部分的传递函数G(z)以及非线性函数f(u),其中间变量x 是不可测量的,预先设定线性部分的模型阶数为n。

图1 Hammerstein 模型
输入端的非线性模块,通常以泰勒展开多项式的形式进行描述,即

其中r 是非线性种多项式的个数,线性子系统可以通过输出信号与中间变量的离散传递函数描述为

1.2 线性传递函数分母参数确定
首先对系统的输入输出信号进行特殊处理,根据系统的特点消除中间变量,利用最小二乘法估计出传递函数分母参数,具体方法描述如下:
输入信号的采样间隔为T,不在采样点上的数据设置为零,对于输出使用间隔h=T/(n+1)来进行采样,如图2、图3 所示。
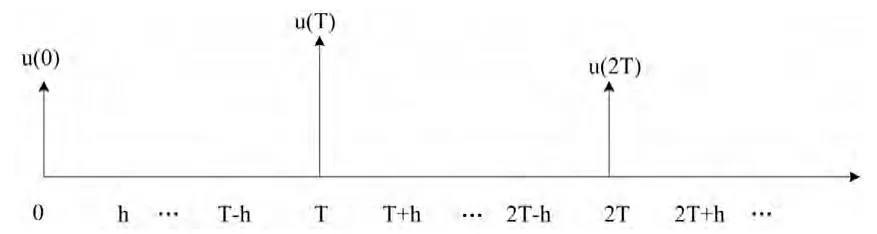
图2 输入数据采样
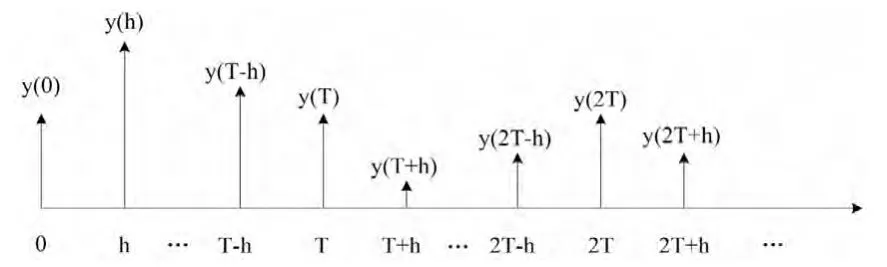
图3 输出数据采样
将式(2)的线性模型转换为时域表达式

根据式(3)和图2,可以看出只有当t=kT=k(n+1)h 时,x(t)才为非零值,而

因此,当k=l(n+1)时有

在此定义矩阵

将式(6)和(7)代入式(5)可以得到矩阵的表示形式

在计算分母参数时采用最小二乘法,本文采用最小二乘估计的算法来计算,构造以下矩阵

其中N 为输出数据个数,通过式(9),(10),(11)得到如下矩阵

θa利用最小二乘估计可以得到

(φ)+是矩阵(φ)的广义逆矩阵,以此通过上式便求得线性传递函数的分母多项式的参数。
1.3 线性传递函数分子与非线性参数的确定
传统的正交基建模的方法,对于正交基函数的获取是通过先验知识或者相关的经验,本文在求得线性部分传递函数分母的基础上,可以求得传递函数的极点值,然后采用正交基辨识思想来利用极点构造标准正交基函数,将线性子系统表示为基函数的形式,结合非线性模块表达形式构造出关系矩阵,最后利用奇异值分解的方法获得各个模块的参数,从而减少了对于先验知识的依赖,并具有更高的准确性,具体描述如下所示:
参考图1,对线性部分采用基函数的表达形式:

其中,p=n+1,Bl(z)是线性部分的正交基函数。根据正交基系统辨识的方法在这里对于线性模块的基函数取做如下形式[9]
ξi是线性部分的极点,可以通过已经求的分母构造多项式进行求解得到。将tk时刻的输入表示为uk,将线性子系统与非线性模型相结合通过式(2)和(14)可以将tk时刻输出yk用如下的公式表示
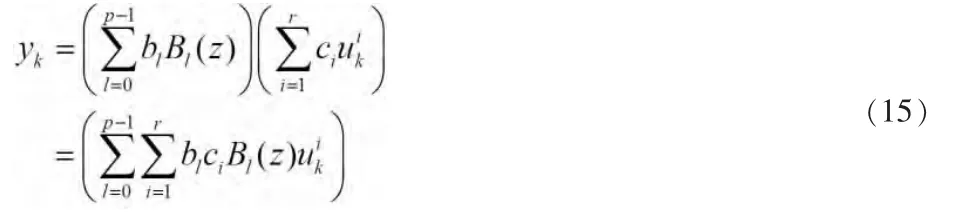
观察上面的式子,通过最小二乘法或其他算法进进行估计参数的时候得到的是bc 的形式,这也是所有的串联模块化非线性辨识的通病,结果经过分离后得到的参数往往是[αc,α-1b]的形式,其中α 为一常数,因为在分离两者时没有一个统一的标准,即前面有可能多乘了一个常数,后面少乘了个常数,但是整体的效果是一样。这就要求有一个标准使得到的参数保持唯一性,大多方法都是使分子参数的二范数为1,这种参数的不唯一性对于整体系统的结果是不影响的。
构造矩阵
将式(18)和(19)代入式(15)得到

从(20)式利用最小二乘可以得到θ 估计

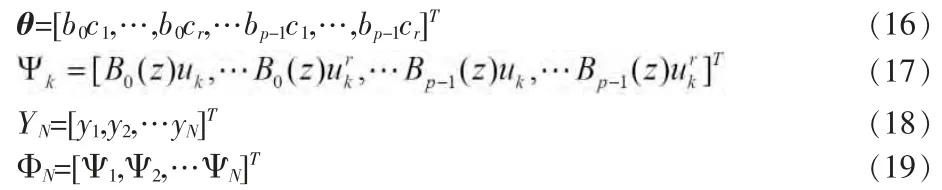
利用式(16)的形式来构造如下矩阵
为了求b 和c,对式(22)的矩阵采用著名的奇异值分解的方法
2 系统仿真
假设线性部分离散传递函数为

输入非线性模型为

对于上述模型进行辨识,输入采用的是[-1 1]上均匀分布的脉冲序列,采样时间0.015s,输出的数据时间间隔为0.005s,数据的处理如图2 和图3;
通过章节1.2 得到线性部分传递函数的分母参数

通过线性部分的分母,可以得到传递函数的两个极点,根据式(3-15)构造得到两个正交基函数为

利用章节1.3 中正交辨识建模的方法来获得线性传递函数的分子参数,与输入非线性的模块的参数。
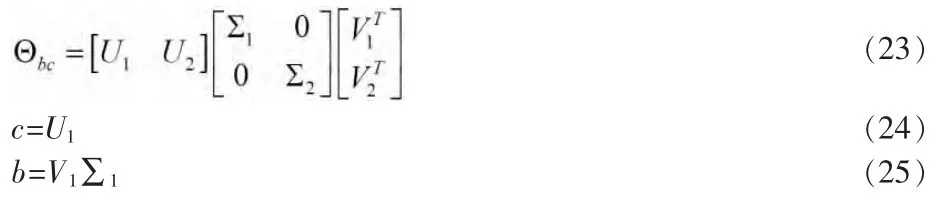
给定系统参数与建模后得到模型参数对比如下表:
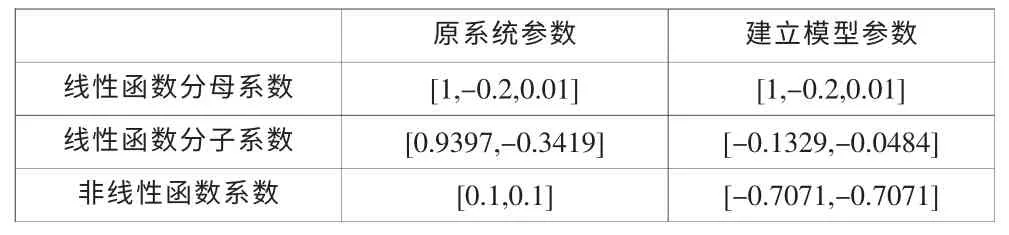
表1 Hammerstein-系统建模参数对比
虽然由于串联型系统建模的通病使得各个模块的擦参数在数值上有所不同,但是整体效果是一样的,参数间会保持一定的比例的关系,建立模型的输出和实际输出结果如图4 所示,两者误差如图5 所示。
图4 Hammerstein-型建模与实际系统输出
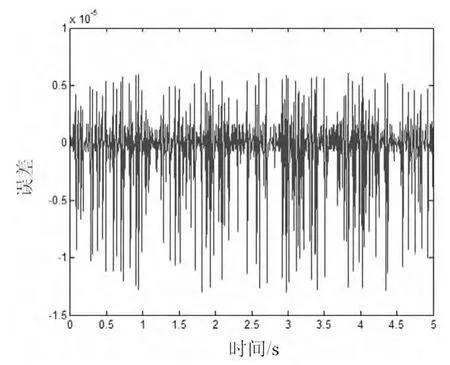
图5 Hammerstein-型建模与实际系统输出误差
从图4 和图5 可以看出对于输入非线性系统通过正交基辨识法建立的模型与实际系统输出十分吻合,误差数量级很小,说明模型能够较好的描述系统,表明算法有效性。
3 结束语
本文研究了基于输入输出数据的模块化非线性模型,对输入非线性(Hammerstein-型)模型利用盲辨识建模算法进行建模,通过对输入输出数据进行不同间隔的采样,仅利用测量的输出数据来计算构造中间变量,并应用最小二乘估计各个模块的参数。并对传统的正交辨识算法中的正交基函数的的构造进行改进,这种方法与传统方法相比减少经验和先验知识的依赖,而且具有更高的准确性。最后通过仿真实例的验证,表明算法有效性。
[1]习毅,潘丰.基于Hammerstein 模型的非线性自适应预测函数控制[J].系统工程与电子技术,2008,30(11):2237-2240.
[2]Chang F,Luus R.A noniterative method for identification using Hammerstein model[J].IEEE Transactions on Automatic Control,1971,AC16:464-468.
[3]Narendra K S,Gallman P G.An iterative method for the identification of nonlinear systems using a Hammerstein mode[J].IEEE Transactions on Automatic Control,1966,AC-11:546-550.
[4]Voros J.Parameter identification of discontinuous Hammerstein systems[J].Automatic,1997,33(6):1141-1146.
[5]Chang F,Luus R.A noniterative method for identification using Hammerstein model[J].IEEE Transactions on Automatic Control,1971,AC-16-468.
[6]Pawlak M.On the series expansion approach to the identification of Hammerstein systems[J].IEEE Transactions on Automatic Control,1991,36(6):763-767.
[7]Bai E W.Identification of systems with hard input nonlinearities[C]//Perspectives in Control,Moheimani R.Ed.New York:Springer Verlag,2001.
[8]Bai E W,Fu M Y.A blind approach to Hammerstein model identification[J].IEEE Transactions on SignalProcessing,2002,50(7):1610-1619.
[9]B.Ninness and F.Gustafsson.A unifying construction of orthonormal-bases for system identification[J].IEEE.Trans.Automat.Contr.,AC-42(4):515-521,1997.
