遥测接收站角跟踪信号模拟器的设计与实现
2015-12-20庞岳峰褚福勇
庞岳峰,褚福勇,张 凯
(酒泉卫星发射中心指挥控制站,甘肃酒泉 732750)
遥测系统是航天飞行器飞行试验过程中的重要支持系统。遥测接收站设备是接收试验数据的重要设备,主要完成目标捕获跟踪、信号分析处理、数据解调传输等工作。随着软件无线电技术的发展,遥测接收站逐渐向数字化、模块化和小型化发展。目前遥测接收站设备多采用单通道单脉冲体制[1],在遥测接收站的研制和改进中,由于跟踪真实动态目标条件受限,希望可以通过角跟踪信号模拟来验证天伺馈系统的动态跟踪性能和状态[2]。本文进行了角跟踪信号的模拟公式推导,提出了角跟踪信号动态模拟的实现方法,对遥测跟踪接收机和天线控制单元而言,其处理真实目标的角跟踪信号与处理模拟角信号的过程一致。角跟踪信号动态模拟要求跟踪误差实时性好,以避免误差积累引起天线飞车。角跟踪信号模拟器实现后,在检验了系统状态的同时也可对操作人员进行训练。
1 遥测地面站角跟踪信号形成原理
目前遥测地面站设备主要采用单通道单脉冲跟踪体制。单通道体制和差信号被合成一个通道,具有无需调整通道间相位、设备结构简单等优点,在靶场遥测系统得到了广泛应用。单通道单脉冲跟踪原理是利用天线波束形成网络输出的角误差信号,经过一组低频信号调制后再与射频E∑信号合并形成一个单通道信号,角误差接收机用解调出的误差电压控制伺服系统以完成对目标的自跟踪[3]。正交调制的单通道单脉冲跟踪体制,使信道中传输的信号既包含遥测数据信息同时也包含角跟踪误差信息,跟踪接收机的角跟踪解调通过对调制在中频信号上的方波调幅信号进行正交同步检波完成。
以五元阵天线为例,其1、3单元的信号经和差器产生方位差信号 EΔA,2、4 单元产生俯仰差信号 EΔE。方位和俯仰差信号分别经0/π调制器正交调制相加得到合成的差信号EΔA+EΔE,此信号与来自第5单元的和信号E∑经定向耦合器合成,形成以方位、俯仰差信号正交调制的和通道载波,得到单通道单脉冲信号EΔA+EΔE+E∑,然后经低噪声放大器输出,其频率变化传递遥测信息,幅度变化传递跟踪角跟踪信息,左右旋两路输出同样信息,提供给信道分系统。
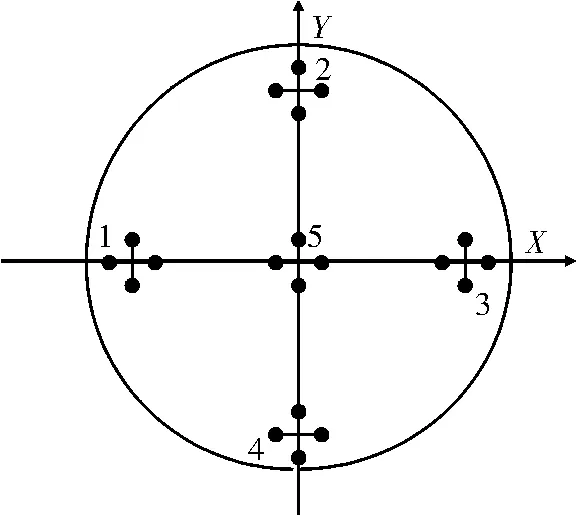
图1 五元阵馈源原理示意图
方位、俯仰载波差信号的数学表达式为[4]

式中,EΔA、EΔE为方位、俯仰载波差信号;A 为单元天线载波信号幅度;D为上下(左右)两单元间距;λ为载波波长;θA和θE为方位、俯仰偏角;ω0为载波角频率,两差支路信号相加之和为

在和差两路载波相加之前差路先通过定向耦合器进行适当的幅度衰减和路进行移相匹配,使之和差两路载波相位相同,相加后形成单路信号EΔ+E∑。
2 角跟踪信号模拟公式推导
2.1 天线角跟踪坐标系下角跟踪信号解算
对于具有单通道单脉冲跟踪功能的天线系统,由馈源形成的和差波束产生空间目标在馈源角跟踪坐标系下的角跟踪信号,当偏离馈源的和差波束中心角度为θ的空间目标S绕电轴旋转时和信号相位不发生变化,差信号相位变化,将和信号和差信号的相位差φ称为轴向角,角跟踪矢量逆时针旋转时φ定义为正向。
馈源坐标系定义为馈源电轴与Z轴重合,和信号相位φ∑与差信号相位φΔ的相位差为0时表示X轴正向,相位差为90°时表示Y轴正向。遥测天线座架的运动方式基本是A-E(方位-俯仰)型,天线在空间沿方位和俯仰两个轴运动,这种天线角跟踪坐标系定义为:天线方位误差UA为正时定义为X轴正向,天线俯仰误差UE为正时定义为Y轴正向。
遥测设备通常采用抛物面天线,馈源安装在反射面焦点处并随天线反射面一同绕方位和俯仰轴转动,馈源和天线反射面间相对位置固定不变。天线校相后馈源和天线的角跟踪坐标系在跟踪目标时重合,当目标偏离天线电轴时,馈源输出的角跟踪信号只与目标偏离天线及馈源电轴的角度大小和方向有关,如图2所示。
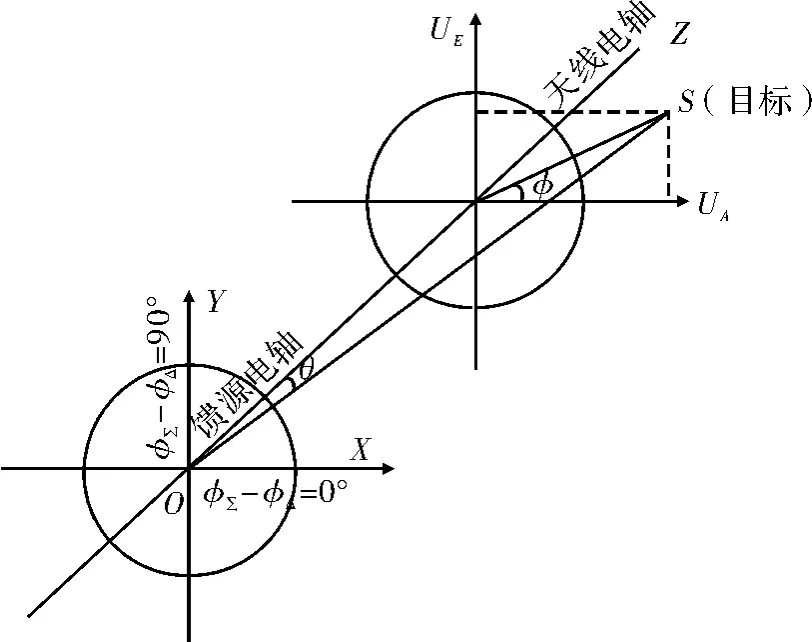
图2 馈源角跟踪坐标与天线角跟踪坐标关系
遥测综合基带解调出的角跟踪电压为[5]
其中,θA,θE为方位、俯仰偏角。此计算的前提是馈源角跟踪坐标系与天线角跟踪坐标系完全重合,在工程中馈源现场安装后采用跟踪校相的方式实现两个坐标系的重合[5]。
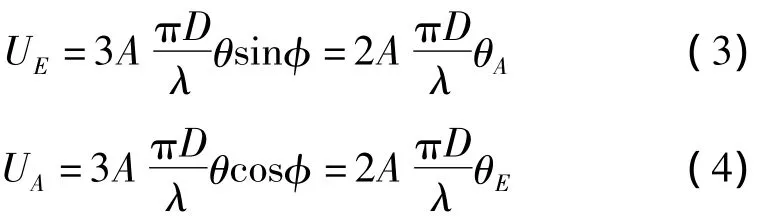
上述UE和UA是在馈源和天线反射面坐标系内的误差分量,跟踪接收机送出的是天线波束横切面方向目标偏离的横向和纵向误差,而对于A-E型天线座架,天线的轴系运转以大地北和水平线为基准,天线方位面和馈源方位面不重合,所以必须进行坐标变换,否则在方位支路则相差一个仰角的正割因子,所以在自跟踪环路中要进行仰角的正割补偿,其因子形成原理如图3所示。
图3 正割补偿原理图
设目标斜距为r,水平偏差为x,φA为水平夹角,并在角度较小时,tanθA≈θA,tanφA≈φA,则

结合式(4)和式(5),则最终控制天线实现自跟踪的俯仰、方位电压为
2.2 角跟踪信号模拟公式
最终控制天线跟踪的方位和俯仰角跟踪电压UA0、UE0与天线A-E方向对目标的偏角基本成正比关系,工程应用中1°的偏角对应5 V的角跟踪电压是理想状态,天线方位和俯仰方向对目标偏角与误差电压对应关系如图4所示。设天线当前实际方位角为φA0,天线跟踪模拟目标的理论方位角为φA,当前实际俯仰角为φE0,天线跟踪模拟目标的理论俯仰角为 φE,则,UA0≈K(φA0-φA),UE0≈K(φE0-φE),K 为角跟踪误差斜率。
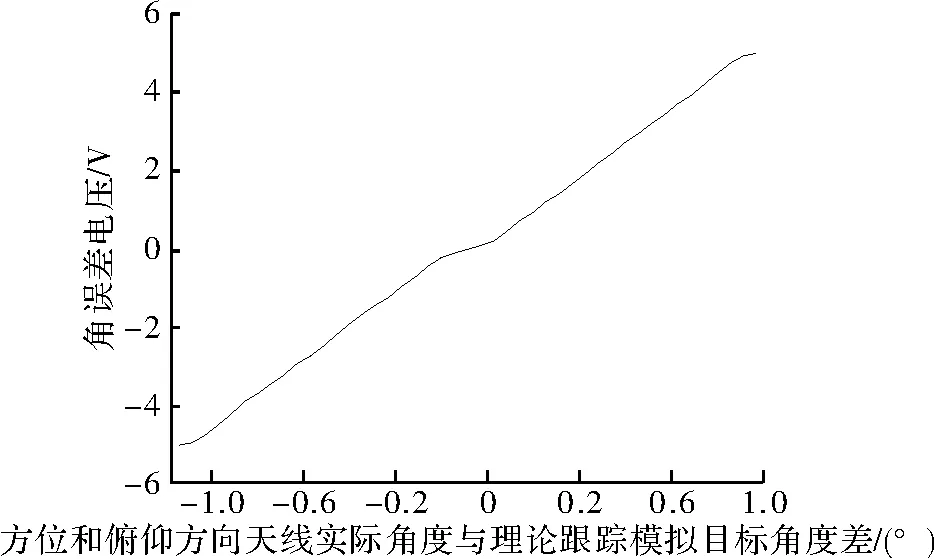
图4 天线方位和俯仰方向对目标偏角与误差电压对应关系图
通过式(6)和式(7)可看出,俯仰角跟踪信号与目标在俯仰方向偏离馈源电轴的角度成正比,方位角跟踪信号与目标在方位方向偏离电轴的角度成正比,且与在俯仰方向偏离馈源电轴角度的余弦成反比,将两式进行反推可得
将式(8)和式(9)代入式(1),得到模拟天线跟踪假想目标方位、俯仰载波差信号的公式为
3 角跟踪信号模拟器的实现
3.1 角跟踪信号模拟器的设计与实现
在式(10)和式(11)中,φA0-φA、φE0-φE和 A 为变量,其它参数都可代入常量处理。某型号遥测地面站设备角跟踪信号模拟器的实现步骤如下:
步骤1 采用Visual C++面向对象方法[6]设计角跟踪信号模拟监控软件,从本机或通过网络从指控中心获取任务理论弹道及设备布站站址并装订,在触发起飞零点后开始解算当前天线理论方位、俯仰角,从天线跟踪控制计算机获取天线实时角与理论角求差,分别产生方位和俯仰方向的偏差角度值,同时产生用于遥测调制的源信号。由于天线跟踪控制计算机向内网发送角度数据的周期是20 Hz,而通常能获取的理论弹道周期是1 Hz,为确保模拟角跟踪信号的实时性能满足天线跟踪系统对跟踪精度要求,对天线实时角度数据和理论弹道都采用拉格朗日3.2次差值,使两者均达到60 Hz。遥测设备角跟踪信号模拟监控软件界面,如图5所示。

图5 遥测设备角跟踪信号模拟监控软件界面图
步骤2 遥测地面站接收信号的功率随目标与天线之间相对距离的变化而改变,亦与天线主瓣是否完全对准信号方向有关,所以对角跟踪信号模拟首先要实现对载波信号电平的动态模拟,接收信号功率电平自适应变化流程,如图6所示。
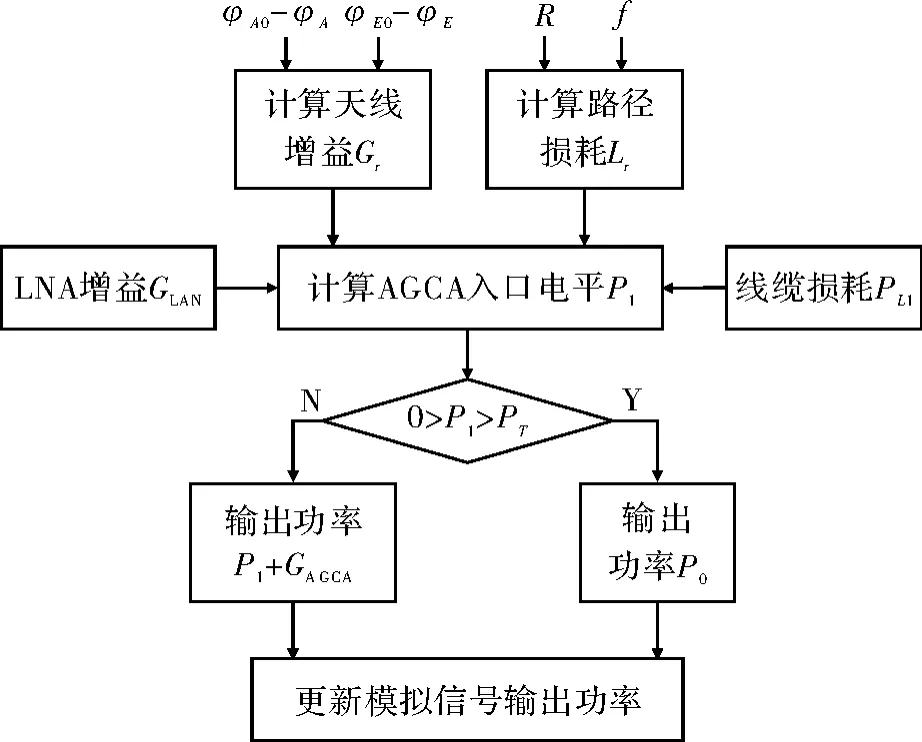
图6 信号功率电平自适应变化流程图
模拟信号的输出功率随着飞行目标与遥测地面站间的距离R、φA0-φA和φE0-φE改变,信号到达遥测地面站后首先经过低噪放大器(LNA)进行信号放大,然后经射频线缆到自动增益放大器(AGCA),最后下变频后进行角跟踪信号解调。角跟踪信号模拟时AGCA之后的信号处理过程与真实目标跟踪的处理过程一致,所以仅考虑AGCA前的信号模拟即可。AGCA属于非线性元件,其起控范围为0~PT,当输入信号在AGCA的起控范围内时,输出功率趋于恒定值P0;反之则等效于一个增益为GAGCA的低噪放大器。LNA增益GLNA和线缆损耗PL1可认为是一个固定值,路径损耗Lr由式(12)计算获得[7],f为飞行目标发射信号的频率,c为光速

则到达AGCA入口的信号电平P1为[7]

其中,P为飞行目标发射功率;Gr为由接收天线增益方向图决定的天线增益,天线增益方向图预先测定并制作成表,在接收信号电平计算时,接收天线偏离目标不同角度下的增益通过查表实现。最后通过P1和AGCA起控范围确定模拟信号的输出功率。
步骤3 分别将方位、俯仰方向偏差的角度值送入模拟器硬件进行调相,遥测调制信号送入模拟器硬件进行调频调制后信号合成,同时模拟器硬件产生1 kHz基准信号,供基带接收解调模块解角跟踪信号使用。信号模拟的硬件实现原理,如图7所示。角跟踪信号模拟监控软件产生方位差、俯仰差、调制源数据以及调制系数,调制源数据通过硬件转换电路形成调频信号,方位差、俯仰差经过调制电路分别形成含方位、俯仰差信息的载波信号,3个信号合成后进行数模转换,产生可以直接作为角跟踪电压解调设备输入也可再进行上变频的70 MHz信号。
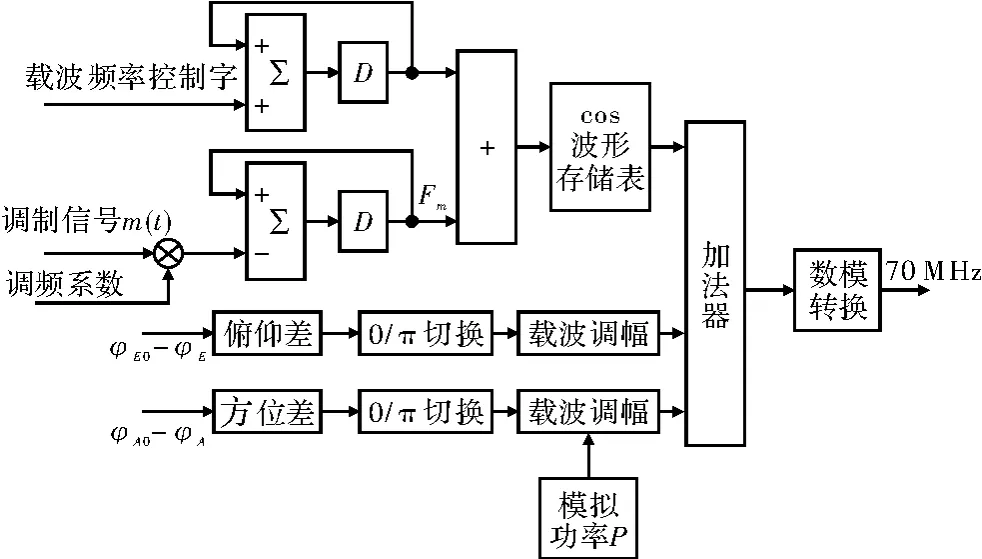
图7 单通道单脉冲信号模拟硬件原理图
步骤4 模拟信号在设备内部闭环,经上变频器上行调制为S频段的信号,然后经设备内部下变频后送至基带进行遥测解调和角跟踪解调,解出的角误差电压送天线跟踪单元驱动天线跟踪,天线控制单元跟踪模拟角跟踪信号原理图,如图8所示。
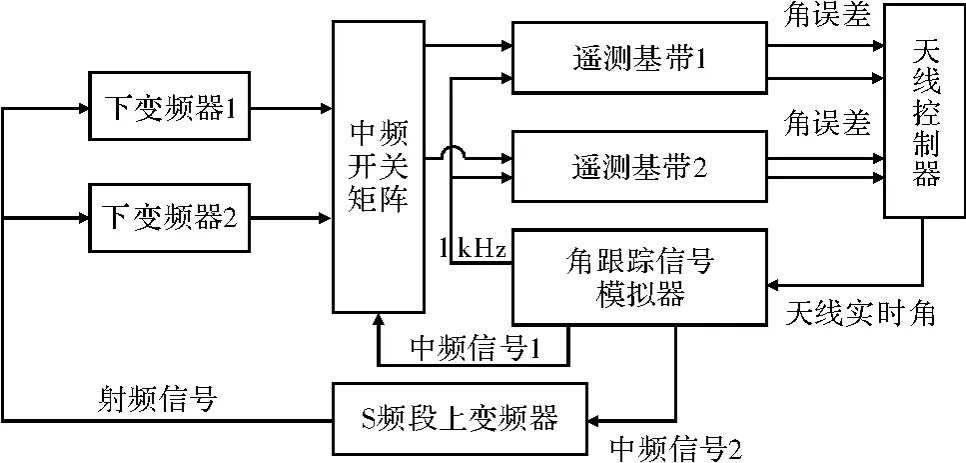
图8 遥测设备角跟踪信号模拟原理图
3.2 角跟踪信号模拟精度分析
为了对角跟踪信号模拟精度进行定量分析,引入均方根误差(RMSE)作为判断标准,其定义为

其中,fi为对模拟角跟踪信号自跟踪的天线角度;gi为天线理论角度。在3套遥测设备上分别进行了3次测试,3套设备对模拟角跟踪信号跟踪的均方差,如表1所示。
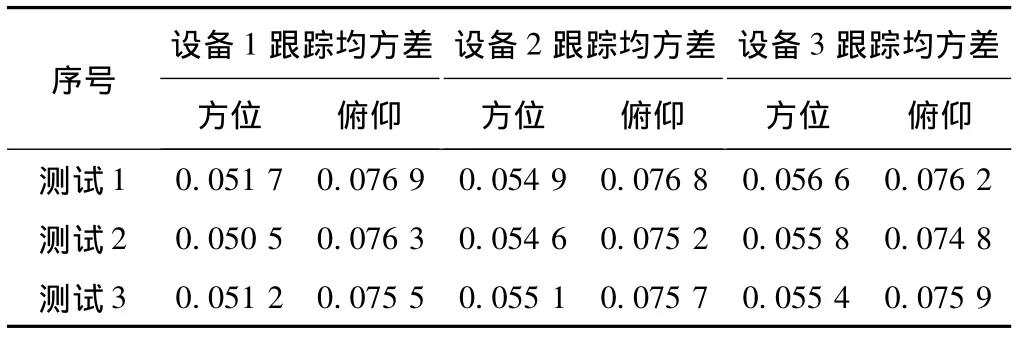
表1 3套设备对模拟角跟踪信号跟踪测试情况
设备对模拟角跟踪信号跟踪的均方差包括角跟踪信号模拟的误差和天线跟踪单元的跟踪误差两部分,用于测试的3套遥测设备天线跟踪单元的跟踪均方差在设备出厂校飞中已测定,从而可定量计算出角跟踪信号模拟的误差。遥测地面站设备的指标要求跟踪均方差<0.1°,因此角跟踪信号模拟的精度满足检验设备跟踪性能的要求。由于3套设备对模拟角跟踪信号跟踪的效果基本相同,只对设备1跟踪过程中的理论跟踪方位/俯仰角与实际跟踪方位/俯仰角差值进行绘图表述,如图9和图10所示。
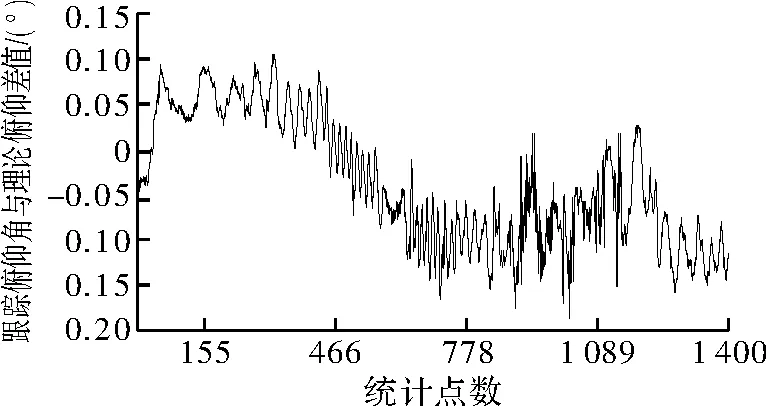
图9 设备1跟踪模拟信号的俯仰角与理论俯仰角差值
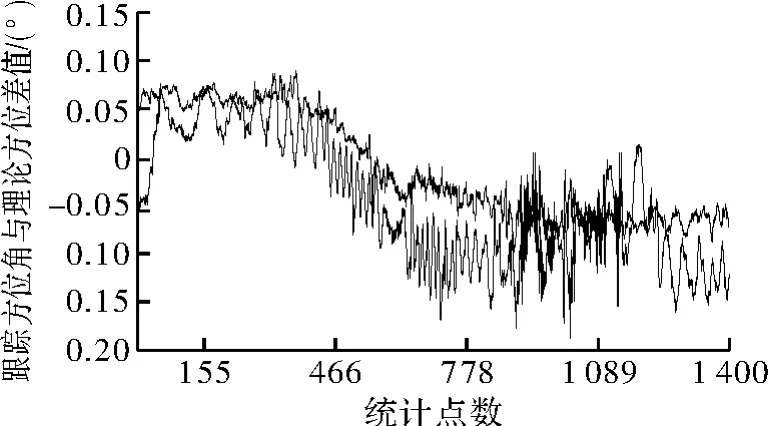
图10 设备1跟踪模拟信号的方位角与理论方位角差值
4 结束语
阐述了角跟踪信号模拟的原理及在工程中的实现方法,通过在遥测设备中应用角跟踪信号动态模拟功能,验证了在遥测设备上进行角跟踪信号动态模拟的设想,角跟踪信号模拟的实时性和精度能够满足检验设备跟踪性能的需求,达到了验证遥测地面站系统跟踪功能、检验设备跟踪性能和通过跟踪模拟目标训练操作人员的目的。
[1]刘蕴才.无线电遥测遥控[M].北京:国防工业出版社,2001.
[2]刘嘉兴.飞行器测控通信过程[M].北京:国防工业出版社,2010.
[3]周智敏,陆必应.航天无线电测控原理与系统[M].北京:电子工业出版社,2008.
[4]朱志勤.自跟踪信号的传递及提取[J].导弹与航天运载技术,1999(6):64-67.
[5]李日尚.圆波导多模角跟踪系统角跟踪解耦方法研究[J].测控与通信,2010(34):1 -2.
[6]孙鑫,余安平.VC++深入详解[M].北京:电子工业出版社,2006.
[7]李秉常.航天遥测系统[M].北京:宇航出版社,2001.
