基于空-地多源数据融合的建筑物精细建模研究
2015-12-14李永强刘会云牛路标李立雪
李永强,刘会云,曹 鸿,牛路标,李立雪
(河南理工大学 测绘与国土信息工程学院,河南 焦作454000)
建筑物精细建模是数字城市和智慧城市建设的重要地理空间信息源,同时对建筑物空间信息获取、建模效率及模型精度提出更高要求[1-3]。机载LiDAR(含航空影像)和车载LiDAR技术不但数据获取速度快、精度高、信息量丰富,而且能直接从三维空间点云中提取建筑物特征信息,适合城市规模的自动化批处理需求。机载LiDAR系统从空中获取建筑物顶部点云和影像信息,准确反映建筑物顶部结构特征,但对建筑物立面信息获取能力有限,车载LiDAR系统精确获取建筑物立面点云数据,准确表达建筑物立面结构特征,但很难得到建筑物顶部信息,空-地多源数据的联合将会取长补短,发挥各自优势,数据融合是一种必然趋势。尽管大场景建筑物进行三维建模时,仍然集中在依赖单一数据源[4-7],多源数据融合也开展了一系列的研究工作。童礼毕[8]以建筑轮廓为配准基元,在实现车载Li-DAR点云中建筑轮廓提取的基础上,采用配准关系修正方法实现了车载-航空LiDAR数据的精确配准。张志超[9]融合机载LiDAR数据中提取的屋顶高度以及轮廓线信息对建筑物缺失的立面进行推理,并结合地面LiDAR数据提取立面对建筑物轮廓线进行精化。吴海若[10]利用车载扫描获取的布法罗一个街区的激光点云数据,结合相应的航空影像数据,对某街区进行三维建模,并将模型上传到Google Earth的3D模型库,检测模型精度。Rutz-inger[11]结合机载和车载LiDAR点云数据,通过区域增长的方法共同提取建筑物立面边界,但是并没有对建筑物进行三维重建。
以空-地LiDAR数据为主体进行建筑物三维建模时,面临两个问题:①点云密度和精度不同。一般情况下,机载LiDAR点云点间距和点位精度均为dm级,车载LiDAR点云点间距和点位精度均为cm级;②点云表达对象形态结构不同。机载LiDAR以顶部边缘为轮廓构建建筑物模型,车载LiDAR以建筑物立面为轮廓构建建筑物模型,大多数建筑物都有檐廊、阳台及层次设计,两者所构建的模型存在差异。本研究主要针对上述问题,研究探讨联合建模的精度问题,并给出合理的解决方案。
1 试验方案
试验数据为芬兰首都赫尔辛基部分城区同一区域建筑物群的机载LiDAR、车载LiDAR及航空影像数据。该试验区地处赫尔辛基新城区核心位置,面积约为50万m2,地形平坦,建筑物密度较大,建筑物屋顶主要有平顶、人字形屋顶、少数复杂组合屋顶,多以建筑群方式汇聚展现。试验区机载LiDAR数据使用Riegl LMS-Q560型机载激光扫描仪获取,点云密度约为20个/m2,车载LiDAR数据使用StreetMapper系统获取,点云密度约为400个/m2,航空影像像素分辨率约为5cm,各数据都经过前期数据处理(包括影像纠正、坐标转换、数据配准等),三者均覆盖建筑物约20幢。图1为试验区各类数据,图1(a)~1(d)分别为机载LiDAR数据、车载LiDAR数据、航空影像数据和空-地LiDAR配准数据。
试验数据具有较高精度,且经过严格的前期处理,因此本研究忽略前期数据处理工作,重点探讨基于多源数据融合的建筑物模型精度问题。试验方案:先基于机载LiDAR、车载LiDAR及影像数据,分别提取建筑物顶面与地面矢量轮廓线;再将三种矢量轮廓线两两融合比较,以轮廓线间垂直距离作为衡量矢量图之间融合效果的指标,构建直方图进行拟合分析与误差评定;最后根据分析结果,给出基于空-地多源数据融合的建筑物精细建模的基本原则和方法。

图1 试验区数据
2 建筑物矢量轮廓线提取
本研究的重点是探讨多源数据融合进行建筑物建模的精度,为了更精确地提取建筑物矢量轮廓线,研究中未采用自动提取算法得到建筑物矢量轮廓线,而是通过Terrasolid软件的绘图工具,由熟练操作人员交互完成。根据不同数据自身的特点,分别进行建筑物轮廓线的提取。航空影像为高清正射影像,精确选取建筑物顶部边缘特征点,连接成为规则矢量轮廓线,如图2(a)所示。机载LiDAR为建筑物顶部点云,有较大的点云密度,参照对应的航空影像,精确选择建筑物顶部边缘点,连接成为规则矢量轮廓线,如图2(b)所示。车载LiDAR获取的是建筑物立面点云数据,根据建筑物立面垂直于水平面的特点,对车载LiDAR点云进行水平投影,从顶视图窗口点云图像中可以看出,立面点云在水平面上的叠加会明确地反映出建筑物底面轮廓的线性特征,密度大的线性点云即为建筑物底面轮廓线,利用精确绘图工具绘制出矢量轮廓线,如图2(c)所示。
从矢量图看出:车载LiDAR系统受数据获取方式的限制,部分建筑物立面数据不完整,所生成的建筑物矢量轮廓线未闭合,显示结果较为简洁;机载LiDAR能得到较完整的建筑物顶部点云,所生成的矢量轮廓线较车载信息量更完整;基于高清影像数据生成的矢量图更能清楚地反映出建筑物顶部内轮廓的具体形态细节。
3 精度分析
因建筑物顶部檐廊及层次设计的需要,顶面与底面矢量轮廓线在尺寸和形状上并不完全相同,顶面矢量轮廓线相对复杂,底面矢量轮廓线相对简单,底面矢量轮廓线各边均贴切地包含于顶面矢量轮廓线内。图3为某建筑物顶面与底面矢量轮廓线比较,图3(a)~3(c)分别为顶底矢量轮廓图、局部放大图、对应建筑物影像图,可以看出,建筑物顶部轮廓线在整体上大于底部轮廓线,两者基本上保持平行关系,其间隔可以认为是屋檐宽度。

图2 建筑物矢量轮廓线

图3 建筑物顶/底矢量轮廓线对比
试验区建筑物多以建筑物群的形态显现,边长及面积相对较大,车载LiDAR系统受数据获取方式的限制,无法得到建筑物内侧立面点云数据,另外航空影像为正射高清影像,没有高程信息,因此在本试验研究中,只对三类数据源共有的建筑物外轮廓进行数据融合和精度分析,并在忽略三者高程差异的基础上,重点分析讨论建筑物模型的平面精度。试验选择18幢数据相对完好的建筑物为研究对象,分别将机载LiDAR、车载LiDAR、正射影像所得矢量轮廓线进行叠置,统计三类矢量轮廓线中的188条线段间的平均距离,轮廓线间最小距离为0.03m,最大距离为0.87m。以0.1m为组距,矢量轮廓线间距的分布直方图分别如图4、图5、图6所示。
图4为影像/机载建筑物外轮廓线间隔统计直方图,直方图分布呈递减的规律,其中间隔在0.3m以内占到了65%。图5为机载/车载LiDAR建筑物外轮廓线间隔统计直方图,直方图呈正态分布规律,以0.4~0.5m为峰值。图6为影像/车载LiDAR建筑物外轮廓线间隔统计直方图,分布特征与图5类似,基本符合正态分布特征,也以0.4~0.5m为峰值。
1)影像/机载LiDAR得到建筑物顶部外轮廓线,理论上两者应该重合,但由于数据配准、数据自身精度及人工提取误差等因素影响,两者存在一定差异,但大部分间隔都在0.3m以内,而超过0.7m的间隔仅为2%,可以认为试验所用数据有较高的精度;
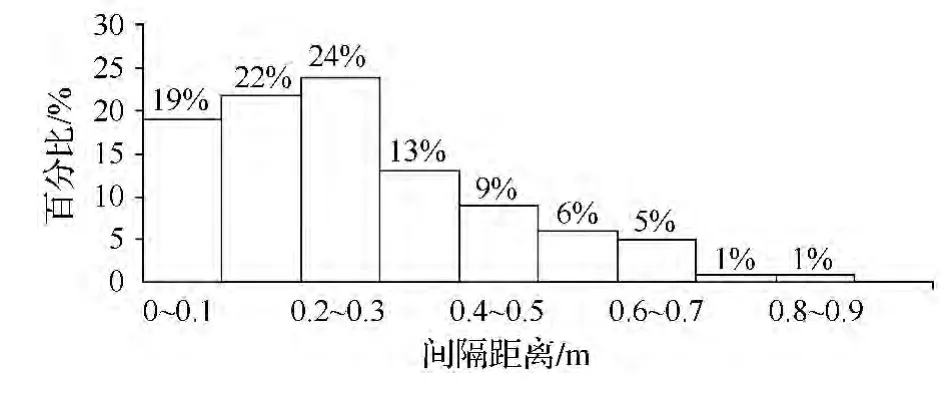
图4 影像/机载LiDAR建筑物外轮廓线间隔统计
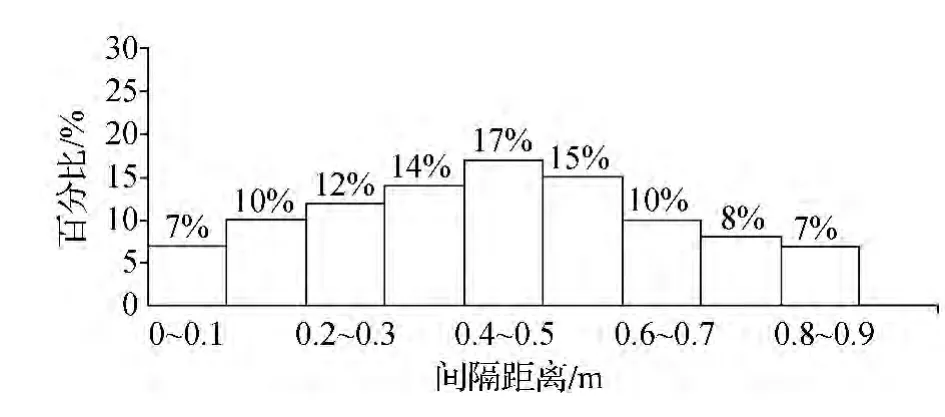
图5 机载/车载LiDAR建筑物外轮廓线间隔统计
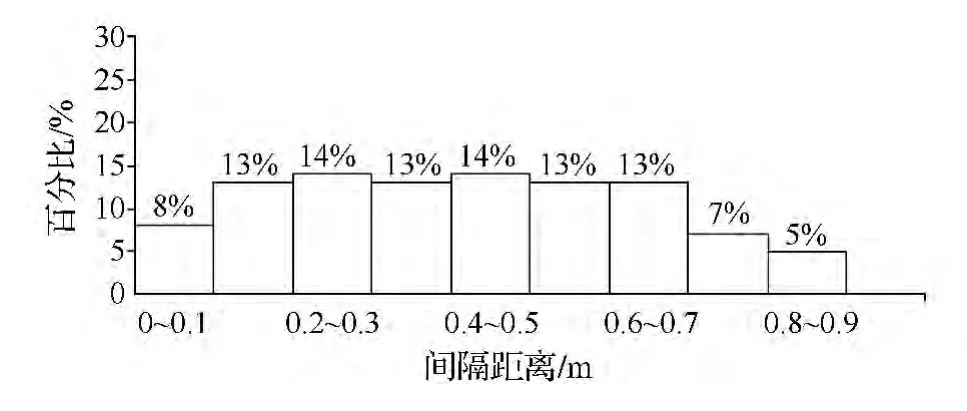
图6 影像/车载LiDAR建筑物外轮廓线间隔统计
2)机载/车载LiDAR提取建筑物外轮廓线间隔在0.2~0.7m之间的比例为68%,以0.4~0.5 m为峰值。除数据配准、数据自身精度及人工提取误差等因素外,主要因为两者的对象不同,机载Li-DAR提取的是建筑物顶部外轮廓线,车载Li-DAR提取的是建筑物立面外轮廓线,建筑物顶部檐廊及层次设计是造成两者差异较大的主要因素,由图3(b)可以看出,建筑物顶部外轮廓和立面存在一定差异。不同建筑物檐廊宽度不同,同一建筑物不同部位檐廊宽度也可能存在不同。
3)影像/车载LiDAR所提取建筑物外轮廓线间隔在0.2~0.7m之间的比例为67%,以0.4~0.5m为峰值,与机载/车载LiDAR建筑物外轮廓线间隔统计一致,进一步佐证建筑物檐廊是造成顶/底轮廓线不一致的主要原因。
从定量角度看,影像/机载LiDAR、机载/车载LiDAR、影像/车载LiDAR对应矢量轮廓线平均距离分别为0.20m,0.46m,0.43m。从数据源的精度来看,一般情况下,机载LiDAR/影像的平面精度为20cm,车载LiDAR平面点位精度为5cm。机载LiDAR/影像提取轮廓线间较差为20cm,且在正常的限差范围内,车载LiDAR/机载LiDAR、车载LiDAR/航空影像提取轮廓线间距差可以认为在0.4~0.6m,这个距离主要是建筑物檐廊的正常宽度,进行建筑物精细建模时,这个值是不能被忽略的,而当前实际生产中,设置0.5m的屋檐宽度,虽然在一定程度上满足生产需求,但每栋建筑物屋檐宽度存在差异,人为宽度缺乏实测依据。基于已有研究成果,针对空-地多源数据联合进行建筑物精细建模,对城市规模的大数据自动处理给出了可行的解决方案:
1)空地数据坐标统一。空-地数据获取的重要传感器均为POS系统,先转换为WGS84坐标系或CGCS2000坐标系(国内数据),再以车载LiDAR数据为参考,对空-地数据源进行精确配准[8]。
2)建筑物顶部数据处理。先自动提取建筑物顶部点云数据,再以建筑物顶部点云为基础构建三维模型,该模型能准确表达建筑物顶部特征,同时提取建筑物顶部轮廓线,作为地面建筑物数据提取的辅助信息[12]。
3)建筑物立面数据处理。以基础地理数据或机载LiDAR提取的建筑物轮廓线为辅助信息[13],设置缓冲区,将车载LiDAR点云中建筑物立面数据分割出来。进一步处理分割出的建筑物立面点云,拟合出各建筑物立面的空间平面位置,并自动提取建筑物立面门窗等细节特征信息。
4)空地多源数据联合处理。以机载LiDAR/影像数据为基础构建建模物顶部模型,突出建筑物顶部细节特征,以车载LiDAR数据为基础构建建筑物立面模型,突出立面位置及门窗等细节特征,融合为统一的建筑物模型。
5)数据融合的取舍:空-地模型融合时,当车载LiDAR获取较大面积建筑物顶(倾斜屋顶)部数据时,或机载LiDAR获取较大面积立面数据时,以车载LiDAR数据为基准,对机载LiDAR数据进行整体平移(平移量<0.5m),然后再分别建模。
6)建筑物屋檐问题。建筑物顶部外轮廓与车载LiDAR拟合的立面之间的水平距离即为屋檐宽度,屋檐厚度需要进一步研究,一般可设置为0.15~0.2m。
7)不完整建筑物立面。利用建筑物的对称特征或邻近建筑物相似特征将缺失部分填补出来,不能修补缺失部分的,仍以机载LiDAR构建的建筑物模型的立面为准。
4 结束语
本文依据机载LiDAR点云、车载LiDAR点云与航空正射影像三种数据源提取了同一建筑物群顶面与地面矢量轮廓线,通过对三类矢量轮廓线平面间距的对比分析,认为建筑物顶部/底部轮廓线间隔为0.4~0.6m,该间隔主要由建造屋檐造成,
屋檐是建筑物精细建模中不能忽略的因素。空-地多源数据融合,进行自动化的建筑物精细三维建模是数字城市和智慧城市建设的必然要求,但当前研究尚处于初步阶段,还有大量问题需要深入系统地研究,主要问题有:空地多源数据的精确配准、建筑物顶部/立面模型的融合机制、数据驱动/规则驱动在多源数据融合中的运用、建筑物屋檐问题的解决等。
[1]张会霞,陈宜金,刘国波.基于三维激光扫描仪的校园建筑物建模研究[J].测绘工程,2010,19(1):32-34,38.
[2]张超,魏占营,王锐,等.数字城市建模方法研究与应用[J].测绘科学,2012,37(5):190-193.
[3]舒琪.精细三维场景制作中数据量控制的方法研究[J].测绘通报,2012(S1):441-443.
[4]吴秀芸.基于高分辨率遥感影像的建筑物提取及轮廓矢量化研究[D].南京:南京大学,2011.
[5]李峰,崔希民,袁德宝,等.利用机载LiDAR点云提取复杂城市建筑物面域[J].国土资源遥感,2013,25(3):86-89.
[6]杨必胜,董震,魏征,等.从车载激光数据中提取复杂建筑物立面的方法[J].测绘学报,2013,42(3):412-417.
[7]曾红齐,毛建华,李先华,等.机载LiDAR点云数据的建筑物重建研究[J].武汉大学学报:自然科学版,2011,36(3):322-324.
[8]童礼毕,程亮,李满春,等.建筑轮廓的车载和航空Li-DAR数据配准[J].测绘学报,2013,42(5):699-706,714.
[9]张志超.融合机载与地面LiDAR数据的建筑物三维重建研究[D].武汉:武汉大学,2010.
[10]吴海若,钟若飞.使用Sketch Up结合车载扫描和航空影像数据进行建筑物三维建模-以纽约布法罗为例[J].首都师范大学学报:自然科学版,2013,34(6):92-98.
[11]RUTZINGER M,et al.Automatic extraction of vertical walls from mobile and airborne laser scanning data[J].ISPRS 2009,37(3/W8):7-11.
[12]JOCHEM A,et al.Automatic roof plane detection and analysis in airborne LiDAR point clouds for solar potential assessment[J].Sensors(Basel).2009;9(7):5241-5262.
[13]李永强,吕海洋,苏蕾,等.车载LiDAR点云中建筑物立面的自动分割[J].测绘科学,2014,39(4):106-109.
