基于机电混合式目标模拟的雷达制导半实物仿真关键技术*
2015-12-10崔潇潇程思敏
张 翔,崔潇潇,王 洋,韩 路,程思敏
(中国兵器工业第203研究所,西安 710065)
0 引言
雷达制导导弹的工作原理是利用雷达导引头发射的雷达波照射目标并接收目标反射的回波信号,导引头对所接收的信号进行处理,同时输出目标视线角速率数据,送导弹制导控制系统,由制导控制系统控制舵机改变导弹的飞行方向和姿态,向目标发起攻击[1-2]。
雷达制导导弹技术含量高,实现难度大,为了能在实验室内考核制导控制部件和武器系统的性能指标,半实物仿真是必不可少的验证手段。雷达制导仿真系统的主要功能是在实验室内产生与被试导引头作战方式相适应的目标和环境信号,进行模拟导弹飞行全过程的制导控制系统闭环半实物仿真试验。实现雷达目标模拟有阵列式和机电混合式两种方式[3],文中主要对基于机电混合式目标模拟的雷达制导半实物仿真关键技术进行研究,首先对比分析了阵列式与机电混合式雷达目标模拟技术的优缺点,对机电混合式雷达制导仿真系统进行了总体方案设计;然后给出了机电混合式雷达目标模拟、目标建模、射频信号屏蔽装置等关键技术的解决途径;最后提出了机电混合式雷达制导仿真系统的工作原理和试验流程。本研究可用于雷达制导仿真系统的构建以及开展仿真试验的参考依据,具有很好的应用前景。
1 雷达目标模拟方式对比
阵列式目标模拟是由射频发射单元按照一定的规律排列在一个球面上[4-5],球面的球心位于转台的回转中心,采用三元组合成信号的模式,模拟到达被试导引头天线口面的目标信号。工作过程为射频信号源产生的信号经过阵列馈电系统从相应的三元组辐射单元合成不同角位置的信号,再经由暗室向被试导引头辐射。
机电混合式目标模拟采用的是小型阵列,通常只有一个三元组,从而可以大大减少射频发射单元的数目。该三元组安装在二维平动系统上,通过二维平动系统带动三元组在垂直和水平两个方向进行线运动实现不同角位置目标回波信号的模拟。
下面对两种方式的优缺点进行对比:
1)仿真能力
由于阵列式目标模拟是由馈电系统来实现目标位置的控制,其位置模拟变化速率和目标模拟精度较机电混合式要强,因此从理论上讲采用阵列式目标模拟的精度更高,仿真能力更强。但在实际中,由于几乎所有雷达导引头的测角精度远远低于机电混合式目标模拟所提供的测角精度,在这种情况下两种目标模拟方式的仿真效果基本相当,仿真置信度都能满足仿真要求。
2)系统复杂度
实现阵列式目标模拟非常复杂,需要几百个射频发射单元,数十个射频开关、程控衰减器、程控移相器和馈电线缆等器件,这些设备都要安装在一个大型钢架结构上,该结构具有六自由度调整功能。机电混合式目标模拟实现起来较为简单,一般只需一个三元组和一个二维平动系统即可实现雷达目标模拟。
3)调试及维护难度
由于组成复杂,阵列式系统的调试及维护难度极高,每隔一段时间都要对阵列上的每个射频发射单元进行校准,每次试验前系统的调试工作非常繁琐,一般需要好几天的准备时间。机电混合式系统由于只使用一个三元组,调试和校准工作很快就可以完成,而二维平动系统的维护难度与转台类似,可靠性较高,操作简单。
4)建设费用
根据国内外已建成的雷达制导仿真系统的经验,阵列式系统的建设费用一般是机电混合式系统建设费用的4~5倍。
综上所述,尽管机电混合式仿真系统在仿真能力方面略有不足,但在系统复杂度、调试及维护难度、仿真系统建设费用等方面具有明显的优势,因此,采用机电混合式仿真系统是一种非常经济、实惠、高效的雷达制导仿真方案。
2 总体方案设计
机电混合式雷达制导仿真系统由射频暗室、射频接收单元、射频信号源、射频发射单元三元组、射频信号屏蔽装置、三轴飞行转台、二维平动系统、舵机负载模拟器、惯导仿真转台、仿真计算机、实时网络系统和试验总控制台系统组成,其原理框图如图1所示。
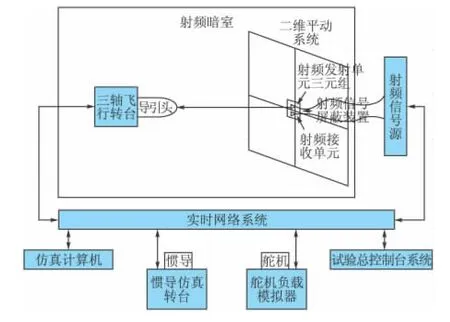
图1 机电混合式雷达制导仿真系统原理框图
如图1所示,仿真系统分为暗室内部分及暗室外部分。暗室内部分由射频发射单元三元组、射频接收单元、射频信号屏蔽装置、三轴飞行转台及二维平动系统组成;暗室外部分由射频信号源、舵机负载模拟器、惯导仿真转台、仿真计算机、实时网络系统及试验总控制台系统组成。仿真时,射频接收单元接收导引头发射的射频信号传输给射频信号源,射频信号源实时生成目标回波信号,供被试导引头探测、捕获和跟踪。各组成部分实现功能如下:
射频暗室:用于在实验室内提供一个电磁波的自由传播空间。
射频接收单元:用于接收导引头发出的射频信号,并转发给射频信号源进行处理。
射频信号源:用于生成目标回波信号及环境杂波信号并输出至射频发射单元三元组。
射频发射单元三元组:用于接收来自射频信号源产生的射频目标信号和干扰信号,处理后向被试导引头辐射,实现目标和干扰的空间角度模拟。
射频信号屏蔽装置:用于屏蔽和吸收被试导引头发出的射频信号,防止其照射到二维平动系统上发生反射,引入额外的干扰信号。
三轴飞行转台:用于模拟导弹在飞行过程中的姿态变化。
二维平动系统:用于负载射频接收单元、射频信号源和射频发射单元三元组,带动其在垂直和水平两个方向进行线运动,实现不同角位置目标回波信号的模拟。
舵机负载模拟器:用于模拟导弹飞行过程中舵机舵面所受空气气动力铰链力矩。
惯导仿真转台:用于模拟导弹在飞行过程中的姿态变化。
仿真计算机:用于仿真试验中导弹飞行弹道以及各种模型的解算和运行。
实时网络系统:用于仿真过程中信息的交互及实时传输。
试验总控制台系统:用于实现仿真系统各组成的监测、控制、数据采集记录等功能。
3 机电混合式雷达制导仿真关键技术
3.1 机电混合式雷达目标模拟
机电混合式雷达目标模拟由射频接收单元、射频信号源、射频发射单元三元组、二维平动系统共同实现。射频发射单元三元组由3个射频发射天线和变频器组成,射频接收单元由一个射频接收天线和变频器组成,二者的布局形式如图2所示。
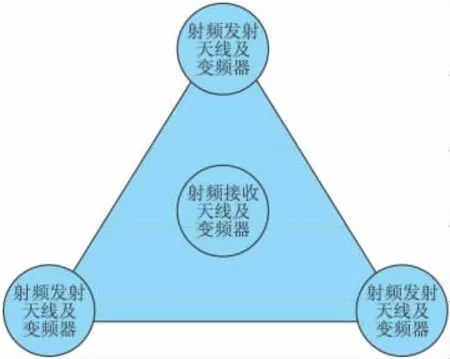
图2 射频发射单元三元组和射频接收单元布局形式
射频发射单元间距的设定决定着射频仿真的精度。单元间距太大,不利于保证目标位置精度,甚至会产生目标位置的多值性;单元间距太小,则阵列单元数骤增,增加投资,而且调试维护工作量增大。为了避免目标位置出现多值,单元间距必须满足以下公式的要求,即:

式中:L为单元间距(rad);D为最大天线口面直径(mm);λ为最小波长(mm);K为系数,一般取经验值K=0.8。目前绝大多数雷达制导仿真系统的射频发射单元间距取值在18~24 mrad之间。
3.2 目标建模
射频目标模型分为非扩展目标和扩展目标两类[6]。当前国内外在进行雷达制导仿真试验时一般使用非扩展目标,扩展目标建模通常采用统计模型,下面是几种常用的目标模型:
模型I:慢起伏A
所谓慢起伏,是指目标回波在任意一次扫描期间都恒定(即完全相关),但从一次扫描到下一次扫描是独立的(不相关)。此时目标截面积的概率密度函数服从指数函数分布:


模型II:快起伏A
此时目标截面积和回波振幅的概率分布与模型I相同,但为快起伏。所谓快起伏,是指目标回波在脉冲与脉冲之间的起伏是统计独立的。
模型III:慢起伏B
目标截面积σ的概率密度分布函数为:


模型IV:快起伏B
目标截面积σ或回波振幅A满足的概率密度函数与起伏模型III相同。
上述4类模型中,第I、II类模型适用于由大量截面积近似相等的独立散射体组成的复杂目标,理论上要求散射体的数量为无限大,实际上只需要四、五个即可。第III、IV类模型适用于一个大的反射体和许多小反射体组成的目标。无论是哪一类情况,代入雷达方程的截面积应是截面积的统计平均值。为了达到规定的检测概率,而虚警概率不超过某允许值所需要的信噪比,可根据不同的统计模型分别求得。如果只用一个参数来描述复杂目标的截面积起伏特性,那么可以用目标回波幅度的均值和统计模型I和II。
3.3 射频信号屏蔽装置
主动雷达导引头的工作过程为导引头不断发射雷达波照射目标并接收目标反射的回波信号。由于不同角位置目标回波信号的模拟是通过二维平动系统实现的,而二维平动系统的框架和十字运动轴会反射导引头发出的主动射频信号,该信号的一部分会向导引头方向反射,与三元组发出的真实射频目标信号一起投射到被试导引头的入瞳,从而严重干扰射频目标信号的品质并影响导引头的判断。该引入的射频干扰信号的强弱和特性并不固定,而是随着入射角度、导引头发射的主动射频信号的特性以及弹目相对运动几何关系而不断变化。干扰信号的强度和误差无法定量的测量和分析,更无法补偿,给试验结果和仿真置信度带来很大的不确定性,严重时会导致仿真试验失败。
二维平动系统的框架是固定不动的,为了防止照射在其上的射频信号发生反射,需在其表面贴覆吸波材料,将干扰信号吸收掉。而对于二维平动系统的十字运动轴,由于其在试验过程中是不断移动的,因而无法采用贴吸波材料的方法,必须设计射频信号屏蔽装置。屏蔽装置实际上是一块贴有吸波材料的平板,通过仿真夹具固定安装于二维平动系统的负载盘中心,随负载盘一起运动,因此无论在任何情况下雷达导引头发出的射频信号都会照射到射频信号屏蔽装置上并被其吸收,避免射频信号在十字运动轴表面发生反射。射频信号屏蔽装置安装位置示意图如图3所示。
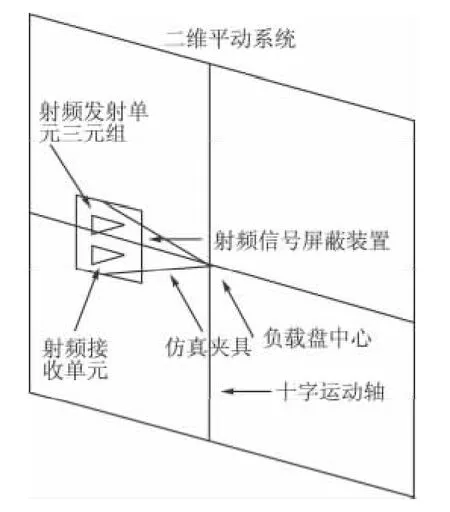
图3 射频信号屏蔽装置安装位置示意图
射频信号屏蔽装置外形为正方形,边长L由被试导引头的波束宽度α及导引头至二维平动系统负载中心的距离R确定。屏蔽装置尺寸及与导引头的相对几何关系如图4所示。
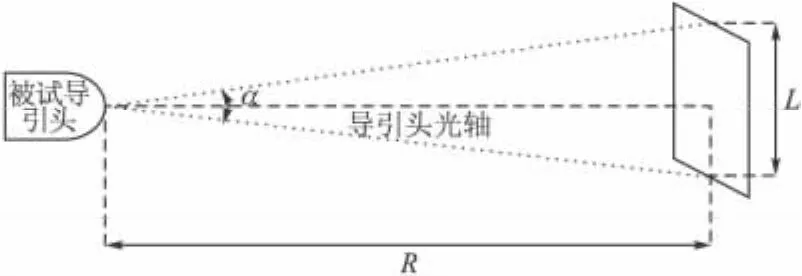
图4 射频信号屏蔽装置尺寸及与导引头的相对几何关系
由图4可以看出,射频信号屏蔽装置边长L计算如下:

4 工作原理及试验流程
如图1所示,雷达导引头安装在三轴转台上;射频接收单元、射频发射单元三元组安装在二维平动系统上,实时接收导引头发出的射频信号并生成目标回波;射频信号屏蔽装置安装在二维平动系统上;舵机安装在舵机负载模拟器上,模拟舵机所受到的铰链力矩。
仿真开始后,仿真计算机运行导弹动力学、运动学模型,实时计算出导弹运动信号、姿态角和姿态角速率信号等。三轴转台和惯导仿真转台按照仿真计算姿态角和姿态角速率信号等驱动指令运动;惯导安装在惯导仿真转台上,实时测出导弹运动信号、姿态角和姿态角速率信号,通过接口送给弹上计算机作为控制系统模型的输入信号。射频接收单元、射频发射单元三元组用夹具安装在二维平动系统上。二维平动系统由仿真计算机控制,实现垂直、水平方向运动,射频接收单元和射频发射单元三元组放置在十字运动轴的交点为导引头提供实时的目标信号,导引头对该信号进行捕获和跟踪,输出视线角速率信号送弹上计算机。弹上计算机综合所有输入信号,运行控制系统模型,形成控制指令,通过接口送给舵机;舵机跟随控制指令运动,形成舵偏角,通过接口送给仿真计算机;仿真计算机根据舵偏角计算控制力和控制力矩实现雷达制导导弹全系统闭环仿真。
5 结论
文中对基于机电混合式目标模拟的雷达制导半实物仿真进行了研究,给出了机电混合式雷达制导仿真系统的总体设计方案。对机电混合式雷达目标模拟、目标建模、射频信号屏蔽装置等关键技术进行了深入研究,提出了机电混合式雷达制导仿真系统的工作原理和试验流程。本研究可用于雷达制导仿真系统的构建以及开展仿真试验的参考依据,具有很好的应用前景。
[1]方辉煜.防空导弹武器系统仿真[M].北京:宇航出版社,1995.
[2]刘兴堂.精确制导、控制与仿真技术[M].北京:国防工业出版社,2006.
[3]单家元,孟秀云,丁艳,等.半实物仿真[M].2版.北京:国防工业出版社,2013.
[4]王海涛,朱根才,贲德.射频仿真系统的误差分析与可信度评估研究[J].系统仿真学报,2007,19(7):1548-1551.
[5]李瑛,胡楚锋,李南京,等.阵列射频仿真系统精度改进方法研究[J].系统仿真学报,2009,21(22):7045-7047.
[6]王国玉,汪连栋.雷达电子战系统数学仿真与评估[M].北京:国防工业出版社,2004.
