应用STM32的车载呼救终端设计
2015-12-06史雪林陆颖
肖 文,史雪林,江 洪,陆颖
(江苏大学 a.计算机科学与通信工程学院;b.机械工程学院;c.汽车与交通工程学院,江苏 镇江 212013)
车辆紧急呼救终端系统[1]可以在车辆发生事故后将碰撞时的车速、地理位置、驾驶员信息等相关信息进行整合,并送至呼救中心,便于救援人员及时了解事故车辆信息,展开救援。在车辆意外抛锚时,驾驶员亦可通过该终端发出求援信息,因此,车辆紧急呼救终端系统对于行车安全具有重要意义。在车辆紧急呼救终端系统中的关键是事故检测识别技术,即通过检测车辆发生事故时的视频、噪音、碰撞等事故特征信号以判断车辆事故是否发生[2-3]。国外开发的系统是通过安全气囊系统自动触发或者用人工按钮来(实现触发,并报告车辆位置、车主身份及车辆碰撞速度等信息[4-6]。但由于碰撞角度、碰撞力等原因,在发生严重事故时,由于安全气囊未能弹出,导致车辆紧急呼叫系统未能自动触发的情况时有发生[7-8]。本研究提出以加速度信号作为事故特征信号的车载呼救系统终端设计方案,并进行了软、硬件设计,最后通过实验验证了该终端系统的可行性。
1 车载终端工作原理及整体结构设计
车载呼救系统终端通过加速度传感器实时采集车辆加速度信息,控制系统对采集到的加速度数据进行实时处理、计算与存储[9],并通过触发算法判断计算值是否超过预设阈值,由此检测事故的发生,并决定是否向呼救中心发送信息。
如图1所示,车载呼救终端的传感器输出的电压信号经过信号调理后输入至后级控制器,通过降压、滤波与A/D转换等处理将模拟信号转换成车载终端控制器可以处理的数字信号,便于控制系统采样。控制系统对数据进行存储、处理等[10]。
车载呼救终端分为事故检测模块和呼救模块。事故检测模块主要负责采集车辆加速度实时数据、图像信息及车身内部数据信息。如图2所示,事故检测模块主要由加速度传感器、嵌入式微处理器、射频模块、摄像头、CAN总线通信接口及SD卡模块组成。

图1 数据采集系统工作框图
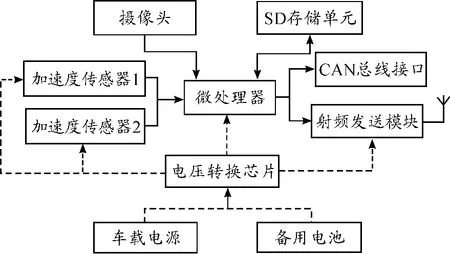
图2 事故检测模块结构示意图
呼救模块主要负责接收事故检测模块发送的车辆碰撞数据信息,根据需求提取车辆位置信息,将信息整理、编码后通过GPRS网络发送至呼救中心,或者通过手动按钮发送求助信息,同时驾驶员亦可通过麦克风等设备与救助中心进行语音通讯,便于救助中心了解详情。如图3所示,呼救模块主要由嵌入式微处理器、射频模块、定位模块、通信模块等单元组成。
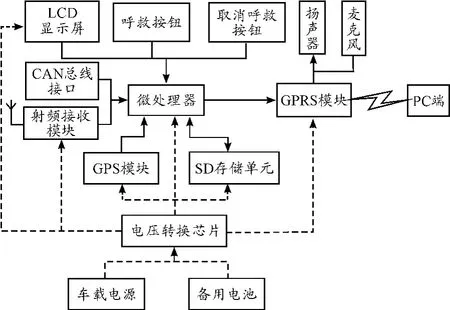
图3 呼救模块结构示意图
事故检测模块采集车辆加速度信息,经过处理器处理后,如果检测到事故的发生,则通过无线射频模块将车辆加速度、速度、图像等信息发送到呼救模块,呼救模块再整合车辆位置、图像、驾驶员等相关信息,将其编码,通过无线通信模块将呼救信息发送到呼救中心。呼救中心则利用相关信息迅速定位事故地点,同时亦可与车内乘员进行语音通话,了解乘员伤害程度,预测事故严重程度,并准备救援。
2 车载终端硬件设计
2.1 STM32F107VC片上资源
终端控制芯片选用ST公司的低功耗32位处理器 STM32F107VCT作为核心芯片[11]。该芯片集成了各种高性能的工业标准接口,且其不同型号产品在引脚和软件上具有兼容性,便于多种应用。该芯片含有10个定时器、2个12位D/A(数模转换器)、2个IIC接口、5个USART接口和3个SPI接口及高质量数字音频接口IIS等。此外,STM32F107芯片还拥有全速USB(OTG)接口、两路CAN2.0B接口,以及以太网10/100MAC模块和2个12位A/D(模数转换器)通道,可进行单次或连续转换模式,转换时间低至1 μs。同时芯片具有丰富的存储资源——256kB Flash及 64kB RAM,无需外接存储设备即可满足多种行业的应用要求[12]。
2.2 加速度采集模块设计
系统终端选用SILICON DESIGNS公司的2210单轴加速度计作为加速度传感器。该传感器能够将电源电压变化造成的影响最小化,具有对温度变化和热梯度不敏感等特性,通过A/D接口与STM32F107芯片连接,其电路如图4所示。AOP为加速度传感器输出接口,经 R9、R10、C19构成的分压滤波电路处理后,通过MCP6042输出端VA输入到STM32 AD通道,输出信号电压范围为0~3 V。
2.3 CAN通讯模块设计
为了便于采集车辆内部相关数据,设计CAN通讯总线接口接入车辆内部数据入口,如图5所示。接口通过CAN总线收发芯片vp230与STM32微处理器的CAN引脚PA11、PA12连接,实现其数据传输功能。用跳线在CANH于CANL之间外接终端电阻,消除信号反射,并通过瞬态稳压二极管D9、D10实现过电压保护。利用电容C29、C30及共模扼流圈L2抑制噪声信号,同时提高了EMI能力。
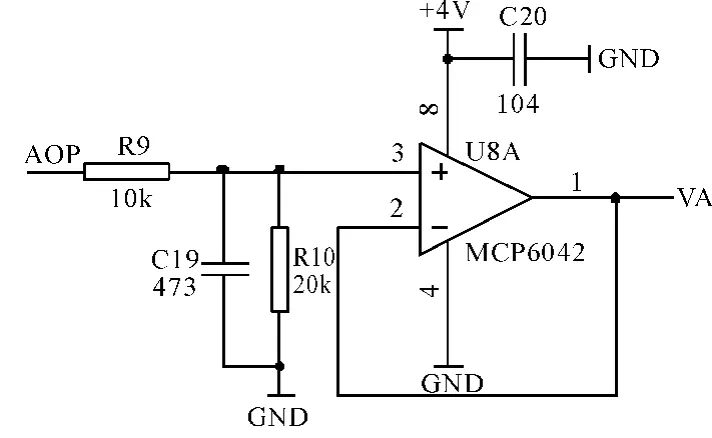
图4 加速度传感器电路
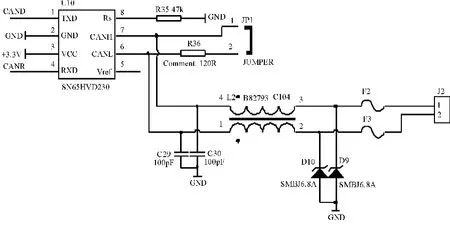
图5 CAN模块电路
2.4 GPS模块设计
GPS模块选用U-Blox公司的NEO-6M芯片作为核心芯片,经匹配电阻R10、R11通过串口与STM32F107芯片连接,其串口引脚为TTL电平。可直接与STM32F107芯片连接,用于接收车辆位置、时间等信息,电路原理如图6所示。电源输入引脚并联大电容C9,使输入电压更加稳定。
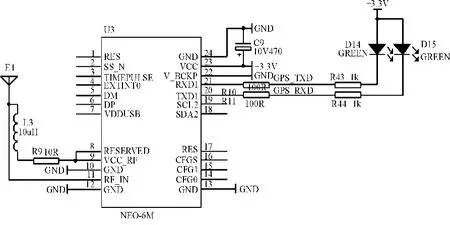
图6 GPS电路原理
2.5 GPRS 模块设计
GPRS模块选用SIMCOM公司的sim900a芯片作为GPRS模块的核心芯片,经过匹配电阻R15、R16通过串口与STM32F107芯片连接,其串口引脚同样为TTL电平,用于与呼救中心之间信息传输,其电路原理如图7所示。选用8引脚卡座Sim carrier进行设计[13],卡座电源由 SIM900a芯片直接提供。为减少信号纹波,降低干扰,提高SIM卡部分的稳定性,在SIM卡复位、时钟、数据输入、输出引脚中分别旁路ESD管器件。

图7 GPRS电路原理
3 车载终端软件设计
系统软件在keil环境下运行,使用C语言进行开发,设计及编写各接口、外设的初始化驱动程序以及呼救触发算法。
1)系统程序初始化设计。包括时钟、定时器的初始化设置,输入输出接口及串口初始化设计,以及数据处理及发送程序的设计。
2)触发算法设计。系统终端采取两种触发方式:手动触发和自动触发。当事故轻微或车辆意外抛锚需要救助时,可通过手动触发方式实现求助。当车辆发生严重事故时,终端自动触发呼救任务。终端事故检测模块使用移动窗式积分法作为碰撞事故的检测算法,首先确定一个时间长度t作为窗口宽度,当窗宽在加速度曲线上移动时,求出窗宽内加速度曲线的积分值,将该值与预设的阈值对比,判断是否发生事故。
3)接口数据传输任务。微处理器通过A/D接口读取并处理加速度信息。通过SPI接口实现射频模块信息的接受与处理,并将信息存储于SD卡中。通过相应的串口读取并处理摄像头模块的图像信息。
4)GPS地理位置信息解码任务。当接收到串口发送的GPS数据时,调用相关函数进行数据的解析、处理,将信息以特定的格式输出,提取出需要的信息,因GPS模块主要获取地理位置、时间、车速等信息,故选用“$GPRMC”格式语句[14-15]。
5)GPRS任务。呼救信息发送通过GPRS网络实现。微处理器通过AT指令调用相关函数唤醒GPRS任务,读取相关数据并编码,接入Internet网络将信息发送至呼救中心。
6)语音通信处理任务。GPRS模块外接有扬声器和麦克风,便于呼救中心与驾驶员进行语音通讯,以便进一步了解详情。
系统终端任务流程如图8所示。

图8 终端任务流程
4 性能实验与分析
4.1 数据采集试验
事故检测模块的准确性与可靠性是系统终端实现其工作的前提。选用某型车进行实车道路加速度采集实验。实验过程中,利用事故检测模块与采集仪同时采集特殊工况下车辆加速度数据,以验证事故检测模块处理数据的准确性、可靠性。同时给事故检测模块一个假定的触发阈值作为判断事故发生的条件。传感器安装位置如图9所示,基座固定于副驾驶左侧座椅下方滑槽处,通过调整其安装方向实现不同方向的数据采集,分别进行急加速、过减速坎、制动等工况下的实验。图10为各工况下事故检测模块与采集仪采集的加速度曲线。实验结果表明,3种工况下事故检测模块均未检测到事故发生。根据图10可知,事故检测模块采集的曲线与采集仪所采集的曲线基本吻合,但该模块仍存在一定的误差,可通过算法或硬件进一步消除干扰,提高该模块采集数据的准确性及可靠性。

图9 传感器安装位置
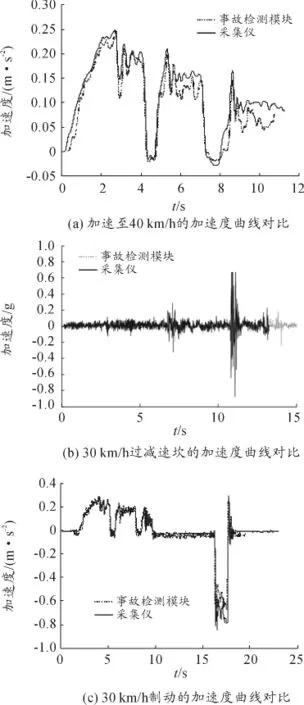
图10 加速度曲线对比
4.2 呼救模块模拟实验
如图11所示,连接好事故检测模块与呼救模块相应接口,分别将其静止放在平行桌面。事故检测模块预先设定一个较小的加速度阈值a,在沿加速度传感器x方向施加一个力f。当该力产生的加速度值超过阈值a时,事故检测模块检测到冲击,并将测得的加速度信息发送至呼救模块。呼救模块提取GPS地理位置、时间等信息后显示在LCD屏上,如图12所示,并自动将信息发送至接收端。当力f产生的加速度值小于阈值a时,呼救模块不发送呼救信息。

图11 车载终端实物

图12 呼救模块LCD屏显示的信息
5 结束语
将呼救终端分为事故检测模块与呼救模块两个模块,可根据其具有的功能将其分别安装在车内合适位置,在一定程度上减少了呼救终端的体积,使其安装更加方便。
实现了事故检测模块与呼救模块之间数据的无线传输,同时因为终端具有丰富的外设接口,可进一步丰富终端的功能。
通过加速度采集实验及模拟实验验证了事故检测模块和呼救模块的可靠性。该终端可实现车辆加速度数据的实时采集、处理,以及检测事故的发生,便于上位机将呼救信息及时发送到救援中心。
[1]Cui Lu-ming,Okada K Bzunorl,Kato Toshihiko.Performance Evaluation on IEEE 802.11e Considering Emergency Calls in Congested Situation[J].The Journal of China Universities of Posts and Telecommunications,2007,14:50-59.
[2]黄河,戴硕,罗海.一种基于声信号的车辆碰撞检测装置[J].电子技术,2010(8):65-67.
[3]尹春娥,陈宽民,万继志.基于小波方程的高速公路交通事故自动检测方法[J].中国公路学报,2014,12(27):106-112.
[4]Boix E.Definition of a Protocol of Automatic Identification and Notification of Road Accidents and Development of an Advanced eCall System[C]//SAE 10th International Conference on Automotive Engineering.2014.
[5]Mohan R A,Chaewon B,Rob B.Evaluating the reliability of automated collision notification systems[J].Accident Analysis and Prevention,2003,35:349-360.
[6]JEONGE,OH C,LE J.Evaluation of Safety Benefits of Automatic Crash in Formation Notification Systems on Freeway[J〛.AutomotiveTechnolog,2014,15(3):495-503.
[7]白中浩,白芳华,刘玉云.采用预测模式的智能安全气囊控制算法[J].华南理工大学学报:自然科学版,2014,42(3):66-71.
[8]吴亮亮,凌旭.智能型汽车安全气囊点火控制算法[J].重庆理工大学学报:自然科学版,2013,27(8):10-13,40.
[9]陈亚东,张金换,黄世霖.汽车碰撞试验用车载数据采集系统的研制[J].公路交通科技,2003,20(2):135-139.
[10]武振昕,敖银辉,曹斌.基于TMS320F2812振动信号采集系统的设计与开发[J].组合机床与自动化加工技术,2013(9):85-87,91.
[11]张旭.基于STM32电力数据采集系统的设计[J].电子测量技术,2010,33(11):90-93.
[12]林强,朱威,王雅杰.基于STM32F107的强震数据采集传输系统设计[J].大地测量与地球动力学,2013,33(S2):80-83.
[13]乔国鹏.基于STM32与AM1705的车载实时监控系统设计[D].成都:成都理工大学,2012.
[14]舒洪灵.基于GPS技术的车辆监控系统的设计和实现[D].成都:电子科技大学,2013.
[15]黄作维,周明,张喜梅.GPS/GPRS支持下的嵌入式车载终端的实现[J].计算机测量与控制,2009,17(11):2205-2208.