新型可爬梯式智能轮椅的研究和设计*
2015-12-06吴晓龙伍学明李成毅
吴晓龙 覃 忠 伍学明 李成毅*
新型可爬梯式智能轮椅的研究和设计*
吴晓龙①覃 忠①伍学明②李成毅②*
目的:研究并设计一种新型可爬梯式智能轮椅,从而解决医院孕妇、母婴及各类需乘坐轮椅的患者在面对凹凸不平、路况复杂的道路上身旁无护理人员时不能自我处理的难题。方法:通过对目前国内、外爬梯式轮椅研究现状及市场的需求展开研究,以Y型行星轮作为可爬梯式轮椅行走部件以及驱动系统构建型轮椅结构,并用AutoCAD绘图软件建立模型进行结构分析。结果:新型可爬梯式轮椅达到的主要技术参数为:①微处理器控制,速度可调为1~10 km/h;②承重为120 kg;③最大爬坡角度为15o左右;④最大越障高度为25 cm;⑤最大越沟宽度为25 cm;⑥充电时间为8 h。结论:新型可爬梯式智能轮椅的系统主要技术指标能够满足电动轮椅的国家标准。
智能轮椅;行星轮;爬梯
[First-author’s address] Equipment Division of Nanhai District Hospital Foshan City, Foshan 528000, China.
目前,社会对轮椅的需要越来越大,并对其性能指标要求越来越高。国外发达国家于20世纪70年代已有智能成熟设备进入市场,而我国现有的轮椅,尤其是肢残者与老年人大量使用的多为手动轮椅,由于轮椅本身无动力,实际使用时往往需要他人辅助。
无论是医院中孕妇、母婴还是残疾人和腿脚不便的老年人,由于生理上的不便其需求存在很大的不同,普通轮椅只能适应普通的室内环境和室外路况,而面对台阶、楼梯和经常可遇到的障碍物等却只能望而却步,即使有人辅助越过这些障碍物也非常吃力和困难,给乘坐轮椅的人带来了很大的麻烦,致使许多残疾人或老年人平时只呆在家里[1]。对于身体虚弱的残疾人和老年人,缺少户外运动更是让他们生理和心理都产生不好的影响,从而导致疾病的发生。为改变我国轮椅手搬人推的较为落后状况,满足人们对现代生活质量日益提高的需求,本研究开发研制新型智能轮椅,以解决医院孕妇、母婴及各类需乘坐轮椅的患者面对凹凸不平、路况复杂而身旁无护理人员时不能有效地自我处理的难题。
1 新型可爬梯式轮椅研究现状与系统原理
目前市场上的普通轮椅结构大致相同,分为手动轮椅和电动轮椅2种。手动轮椅多用手轮圈驱动(如图1所示)。电动轮椅则由直流电机带减速箱驱动,摇柄控制(如图2所示)。而爬楼梯装置爬楼执行机构的类型主要归结为轮组式、履带式和多足式3类[2]。

图1 普通手动轮椅示图

图2 普通电动轮椅示图
1.1 轮组式轮椅
轮组式轮椅的特点是每个轮组依照行星轮的方式进行运动,平地行驶时各小轮绕各自轴线自转,爬楼梯时各小轮一起绕中心轴公转。爬楼梯装置按照所使用的轮组对数可分为单轮组式和双轮组式。轮组式爬楼梯装置与其他构型的装置相比其质量轻便运动灵活,在无障碍环境下具有较好的行动性能,但是上、下楼梯时该类型装置重心起伏较大,会使乘坐者感到不适,因此需要设计一种自适应座椅调平机构[3](如图3所示)。

图3 轮组式轮椅示图
1.2 履带式轮椅
履带型机构的爬楼梯轮椅应用较多,其采用比行星轮机构更为连续的行走方式,传动效率较高。在上下楼梯过程中轮椅的重心总会沿着与楼梯台阶连线相平行的直线运动,其重心的波动很小,运动非常平稳[4]。然而,履带式爬楼梯轮椅最大的不足是平地行走时阻力较大,运动不灵活,在爬楼梯时履带容易损坏楼梯沿(如图4所示)。

图4 履带式轮椅示图
1.3 多足式轮椅
多足式轮椅的主要特点为具有两套或两套以上支撑装置,多套支撑装置交替支撑,以实现上、下楼梯的功能。这种机构的爬楼梯过程类似于人体上下楼梯的过程,故有人称之为步行式爬楼梯轮椅,1892年Bray发明的第一台爬楼梯轮椅就采用了这种方式[5]。在爬楼梯时先由其中一套支撑装置支撑,抬高轮椅及另一套支撑系统,再水平向前移动,上一级台阶。然后,由另一套支撑装置支撑,将前面那套支撑装置收回,如此循环,直到爬完楼梯为止,其爬楼梯过程不连续。此种类型的爬楼梯轮椅运动相对比较平稳,但是对控制的要求较高,操作较为复杂(如图5所示)。

图5 多足式轮椅示图
由于轮组式爬楼梯轮椅可以兼顾平地行驶和爬楼梯,而且结构紧凑,体积小巧,效率较高,操作相当简单,是比较理想的爬楼梯机构。结合我国国情和轮椅使用者的经济承受能力,在分析现有爬楼梯机构优缺点的基础上,本研究设计了一种基于轮组机构的爬楼梯轮椅,既可满足爬楼梯功能,又安全可靠,操作方便,通用性好而且价格适中。
2 新型可爬梯式轮椅结构与设计
可爬梯式轮椅设计的基本要求为:①具有普通轮椅功能;②座椅在行进和爬梯时要平稳;③驱动机构稳定;④重量较轻容易搬动;⑤价格适中。其主要由车架、座椅调平机构、行驶机构、驱动机构和制动机构等组成。新型爬梯式轮椅的总体计算机辅助设计(computer aided design,CAD)结构如图6所示。

图6 新型可爬梯式轮椅CAD结构图
2.1 动力驱动机构
动力机构由2个驱动桥组成,前后桥各有一套传动系统,由变速马达、减速器、差速器和左、右轮系统组成。轮椅采用4驱动形式,以保证爬楼梯时通过足够的翻转力矩(如图7所示)。
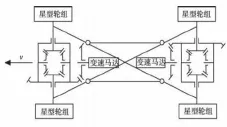
图7 爬梯轮椅的传动机构示意图
2.2 行驶机构
行驶机构采用轮组结构。轮组结构一般由2个以上的小轮构成,小轮为2个时其结构最简单,但爬梯时轮架所需的翻转力矩最大,轮组支架中心的起伏也最大。随着小轮个数的增加,轮组支架所需的翻转力矩减小,轮组架中心的起伏减小,但结构也随之复杂。本研究选用由3个小轮构成的轮组结构,即星轮结构。平地行驶时,轮系为定轴轮系,任意2个小轮着地,实现前进;遇到障碍或楼梯时,利用电磁离合器将驱动轮锁死,不能往后退。爬楼过程中,行星轮系将承受很大的爬楼力矩及碰撞冲击,非常容易损坏(如图8所示)。

图8 星轮结构传动简图
2.3 座椅调平机构
在上下楼时爬楼梯轮椅整体是倾斜的,坐在倾斜的轮椅会使乘坐者感到不适。为了克服这一弊端和轮椅爬楼过程中重心的起伏,专门设计了一种滚道滑轨式的座椅调平机构,其主要由圆弧形轨道及滚轴组成[9-10]。滑轨焊接在底架上,滚轴通过螺纹连接固定在座椅底部的支架上,其轴端安装有轴承可以在滑轨里滑动,从而实现座椅的调平(如图9所示)。

图9 滚道滑轨式座椅调平机构原理图
2.4 制动机构
为了保证轮椅爬楼过程的安全性,必须保证其良好的制动性。制动机构分为刹车和防上下滑动两部分,当人坐在轮椅中上下楼梯时为保证安全必须设置一些防止打滑移动的装置,以保证轮椅上下楼梯时不发生上下打滑移动。
3 新型可爬梯式轮椅运动过程分析
3.1 平地行驶
当轮椅在平地行驶时行星轮的任意个小轮着地,其效率与普通轮式车辆相同。当前后变速马达转速相同时轮椅能够克服地面摩擦力直线行驶;当前后变速马达存在转速差时可实现轮椅转弯。
3.2 跨越障碍
轮椅直线行进时遇到一般障碍,当障碍物高度较小时可利用小车轮尺寸优势直接通过;当前进的车轮碰上较高障碍而不能直接通过时电磁离合器结合,定轴轮系发生演变,带动支架翻转越过障碍。
3.3 跨越壕沟
轮椅可以跨越一定宽度的壕沟,其跨沟原理与越障相同,当行星轮不能直接通过小沟时,接通电磁离合器,带动支架翻转实现跨越壕沟。
3.4 爬梯
轮椅爬楼梯过程中平地行驶时任意两个小轮着地,电磁离合器分离,可以有效利用车轮的附着质量,提高车轮的通过性;当最前端的车轮遇到楼梯或者障碍物时前行星轮电磁离合器开启,同时小轮自锁,带动前支架翻转轮椅开始爬梯;当后轮遇到楼梯或者障碍物时后行星轮电磁离合器开启,带动后支架翻转开始爬楼,爬楼过程中座椅始终保持水平(如图10所示)。

图10 新型可爬梯式轮椅爬梯过程示图
4 结语
目前,现有轮椅尤其是肢残者与老年人大量使用的多为手动轮椅,由于轮椅本身无动力,实际使用时往往需要他人辅助,诸感不便。为改变我国轮椅手搬人推的落后状况,更好地为伤残人员服务,满足人们对现代生活质量日益提高的需求,积极开发研制智能轮椅具有重要意义。本研究设计的新型可爬梯式轮椅的主要技术指标能够满足电动轮椅的国家标准GB/T12996-1991“电动轮椅车”,翻越楼梯指标能够满足国家标准GB 50386-2005“住宅建筑规范”中所规定楼梯标准及常见的户外楼梯,由此有很好的应用推广意义[11-13]。
[1]程智力,李君华.残疾人多功能轮椅设计研究[J].美术大观,2010(12):211.
[2]李超,胡延平,韦端利.一种轮组结构的爬楼梯轮椅的设计[J].现代机械,2010(6):169-176.
[3]袁爱霞,高中庸,李宝灵.机械原理与机构创新设计[J].高教论坛,2007(1):78-79.
[4]苏和平,王利华.手动爬楼梯轮椅爬行部件的改进[J].中国康复医学杂志,1999,9(5):219-220.
[5]冯雅丽,马佳珍,张文明,等.深海采矿机行星轮式行走机构越障行为[J].北京科技大学学报,2009(7):923-928.
[6]苏和平,王人成.一种双联星形轮机构电动爬楼梯轮椅的设计[J].中国临床康复,2005,9(26):144-145.
[7]金强,吴昌林,刘香香.行星轮式爬楼梯轮椅的应用研究[J].中国康复医学杂志,2011,26(1):65-68.
[8]王洪欣,李爱军.行星轮点轨迹的图形分类与应用研究[J].工程图学学报,2010(3):11-14.
[9]杜宇,吴燮华.电动轮椅控制器的设计与实现[J].电力电子技术,2004(1):63-65.
[10]袁世奇,宫兴祯,唐宗军.一种具有全方向运动功能的电动轮椅的设计[J].沈阳工业大学学报,2004(6): 612-615.
[11]国家技术监督局.GB/T12996-1991电动轮椅车[S].国家技术监督局,1991-06-19.
[12]甘新平,伍学明,许小强.新型多功能电动轮椅的研究和CAD设计[J].临床医学工程,2012,19(7):1041-1042.
[13]中华人民共和国建设部.GB 50386-2005住宅建筑规范[S].国家质量检验检疫总局,2005-11-30.
Research and design of the new stair climbing intelligent wheelchair
WU Xiao-Long, QINZhong, WU Xue-ming, et al
China Medical Equipment,2015,12(6):12-15.
Objective: Study and design the new stair climbing intelligent wheelchair for the people who use wheel chair in order to be well handled in the face of the rugged road especially ladder and other obstacles. Methods: By means of research the status of the current ladder wheelchair at home and abroad, as well as market demand, the new ladder-type wheelchair parts and the drive system is based on the Y-type planetary gear, and use the AutoCAD software to draw model and analysis structure. Results: Main technical specification of the new stair climbing intelligent wheelchair as follows: speed adjustable controlled by Microprocesso, 1-10 km/h; carry weight: 120 kg; maximum climbing angle: 15o; maximum climbing barrier altitude: 25 cm; maximum climbing barrier width: 25 cm; battery charging time: 8 h. Conclusion: Main technical specifications of the system are satisfied with the national criterion.
Intelligent wheel chair; Planetary gear; Ladder
吴晓龙,男,(1969- ),本科学历,工程师。佛山市南海区中医院设备科,从事医疗设备采购、维修、保养、效益分析及档案管理工作。
1672-8270(2015)06-0012-04
R197.39
A
10.3969/J.ISSN.1672-8270.2015.06.004
2015-03-02
广东省重大科技专项(2012A080104010)“基于云计算及物联网的母婴云端智能呵护平台”
①佛山市南海区中医院设备科 广东 佛山 528000
②广州市第十二人民医院设备科 广东 广州 510620
*通讯作者:646845462@qq.com
