半捷联惯导系统轴向角度安装误差分析与补偿
2015-11-17张樨李杰侯利朋祝敬德秦丽
张樨,李杰,侯利朋,祝敬德,秦丽
(中北大学仪器与电子学院,山西太原030051)
半捷联惯导系统轴向角度安装误差分析与补偿
张樨,李杰,侯利朋,祝敬德,秦丽
(中北大学仪器与电子学院,山西太原030051)
针对半捷联惯性测量系统中轴向角度安装误差影响系统姿态测量精度的问题,分析了轴向角度安装误差的来源、产生机理及其对姿态测量精度的影响规律,并从理论上推导了其数学表达式。在此基础上,提出了轴向角度安装误差的分级补偿方法。该方法的核心思想是,根据轴向角度安装误差产生的原理和作用机理不同,依次对其补偿。地面实测试验表明,对轴向角度安装误差的补偿方法是正确和有效的,利用该补偿方法可以将轴向角度安装误差引起的周期性姿态测量误差由0.32°减小到0.05°以内,减小幅度达1个数量级,显著地提高了系统的解算精度。
兵器科学与技术;半捷联;惯性测量系统;角度安装误差;分析;补偿
0 引言
基于微机电(MEMS)惯性器件的惯性测量系统由于具有自主性强、可靠性高、体积小、质量轻、成本低、功耗小、抗高过载以及易于安装和维护等一系列的优势,被认为是空间狭窄、环境恶劣、飞行时间较短的旋转弹药制导化过程中不可或缺的重要导航制导组件[1-3]。然而由于制造工艺的限制,MEMS惯性元器件存在量程和测量精度之间的矛盾,从而导致传统的捷联式测量方法在高转速环境下测量精度降低[4-5]。半捷联式测量方法基于滚转轴隔离原理,能够为惯性测量单元提供减旋环境,使小量程、高精度的MEMS惯性器件得以应用,有利于提高制导弹药的测量精度,进而提高其打击精度[6-9]。
半捷联惯性测量系统涉及到各组件之间的轴向装配问题,因此不可避免地会引入轴向角度安装误差,进而在系统姿态测量过程中产生周期性的姿态误差,导致惯性测量系统的姿态测量精度降低[10-11]。本文针对系统中存在的轴向角度安装误差问题,对其进行了理论分析和数学建模,进而提出了补偿该误差的方法与措施,并通过地面实测试验验证了该方法的正确性和有效性。
1 半捷联惯性测量系统组成结构与工作原理
半捷联惯性测量系统主要分为系统、内筒、支撑结构(包括支撑轴和支撑轴承)和角度测量装置(光电编码器)四部分,如图1所示。

图1 半捷联惯性测量系统结构Fig.1 Structure of semi-strapdown INS
MEMS惯性测量单元(MIMU)安装在系统的内筒之中,内筒通过支撑轴与系统连接,并且可以通过支撑轴承在滚转轴向上自由转动,而另外两个方向上与系统捷联。通过配置偏心质量块使内筒重心偏移,因此在系统随旋转弹药旋转时,内筒由于受到重力力矩的作用(轴承的摩擦力矩与重力力矩相比很小,故忽略不计)而不随外部弹体旋转,从而大大降低了内筒的实际滚转角速度,有效地达到“滚转隔离”的效果。绝对式光电编码器测量内筒与系统之间的相对转动角度,为内筒到系统的姿态信息变换提供相对转动角度信息。
由于半捷联装置可以有效降低内筒的滚转角速度,从而可以应用较低量程、较高精度的MEMS惯性器件(尤其是MEMS陀螺仪),从器件方面进一步提高了姿态、位置信息测量精度。
与捷联系统相比,半捷联惯性测量系统在轴向上的组成部件更多,因此装配过程中会引入更多的轴向角度安装误差。这些角度误差相互叠加,为误差的分析与补偿带来困难。因此本文主要研究多个轴向角度安装误差叠加对姿态信息的影响,以及补偿该误差的方法。
2 轴向角度误差产生机理分析
如图2所示,定义系统坐标系为O0x0y0z0,其中O0为系统安装面的中心,x0轴沿系统轴向前,y0轴垂直于系统轴向上,z0轴与x0轴和y0轴构成右手坐标系,坐标系随系统转动;内筒坐标系为O1x1y1z1,其中O1为内筒底面的圆心,x1轴沿内筒轴向前,y1轴垂直于内筒轴向上,z1轴与x1轴和y1轴构成右手坐标系,坐标系随着内筒转动;MIMU的坐标系为O2x2y2z2,随着MIMU转动。由于上述各部件之间存在轴向配合关系,所以不可避免地会引入轴向角度安装误差。

图2 坐标系定义Fig.2 Definition of coordinate system
由于内筒与系统之间存在角度安装误差,故当系统绕x0轴以角速度ω0转动时,会带动内筒轴x1绕x0轴做锥运动,与此同时,内筒受到轴承的摩擦力矩与自身重力力矩的共同作用,绕自身x1轴以角速度ω1做小幅度摆动(小于±5°),故内筒的实际运动由锥运动和自身摆动复合而成。
由于内筒绕系统轴做锥运动,故设定内筒与系统之间的轴向角度安装误差为半锥角α;内筒与MIMU之间无相对转动,故设定内筒与MIMU之间的角度安装误差为(ψ0,θ0,0).
经上述分析,当系统以角速度ω0转动,内筒以角速度ω1做小幅度摆动时,可将内筒实际的三轴角速度(ωx1,ωy1,ωz1)T表示如下:
式中:φt为光电编码器测得的内筒与系统之间的相对滚转角度;φ0为内筒与系统之间的初始滚转角度。
由于内筒与MIMU之间的轴向角度安装误差为(ψ0,θ0,0),根据坐标变换原理,可求得此时MIMU测量到的角速度分量(ωx2,ωy2,ωz2)T为

式中:
3 轴向角度误差补偿方法
3.1 MIMU与内筒之间的角度安装误差计算方法
将内筒固定到高精度速率转台上,并通过校正确保内筒与转台同轴,当转台带动内筒以角速度(ω1,0,0)T转动时,MIMU会相应地测量到三轴角速度为(tlx1,tly1,tlz1)T,假设内筒与MIMU之间的轴向角度安装误差为(ψ0,θ0,0),则根据(2)式和(3)式可建立如下关系式:
由(4)式可提取出ψ0和θ0的表达式分别为

3.2 内筒与系统之间的角度安装误差计算方法
将惯性测量系统固定在飞行仿真转台上,并通过校正确保惯性测量系统与转台同轴。飞行仿真转台以角速度ω0带动系统转动,可测得MIMU的三轴角速度(tlx2,tly2,tlz2)T,由(2)式可推导出内筒的三轴角速度信息(ωx1,ωy1,ωz1)T,如(5)式所示。
式中:
根据(1)式可提取出以下等式:

解此二元方程可得内筒与系统之间的轴向角度安装误差α以及内筒与系统之间的初始滚转角度φ0:

3.3 角度误差补偿方法
角度误差补偿的最终目的就是去除角速度测量信息中由轴向角度安装误差引入的姿态误差信息。
第一步,将MIMU测量到的角速度信息(tlx,tly,tlz)T通过坐标变换投影到内筒坐标系,则可计算出内筒的角速度信息为

通过该步可消除MIMU与内筒之间角度安装误差对角速度测量误差的影响。
第二步,去除内筒角速度信息中由圆锥运动引起的角速度误差信息,则可得到内筒在去除圆锥运动误差影响后的角速度为

式中:ω0为系统角速度信息(内筒轴向角速度为ωx1,对光电编码器测得的角度信息使用M/T法可求得内筒与系统之间的相对转动角速度ωx1-x0,二者叠加即可得出ω0.
4 试验验证
为了验证该补偿方法的正确性,设计了角度误差标定与补偿试验。该试验采用零偏稳定性为30°/h,量程为±300°/s的MEMS陀螺仪组成惯性测量单元,通过相应试验求得角度误差(ψ0,θ0,0)和α,再通过上述分析方法进行误差补偿。
4.1 求取角度误差(ψ0,θ0,0)
高精度速率转台带动内筒以280°/s的恒定角速度转动,MIMU测量到的三轴角速度tlx1、tly1、tlz1信息如图3所示。

图3 MIMU角速度信息Fig.3 Angular velocity information from MIMU
将三轴角速度代入(5)式可计算出:ψ0= -0.11°,θ0=-0.04°.
4.2 求取角度误差α
在飞行仿真转台上以角速度6 480°/s带动系统转动,由MIMU测量到的三轴角速度,经过(9)式所示的坐标转换后,可得到内筒的三轴角速度ωx1、ωy1、ωz1信息,如图4所示。

图4 内筒角速度信息Fig.4 Angular velocity information of internal cylinder
将内筒的三轴角速度代入(8)式可得:α= 0.164 2°,φ0=27.3°.
4.3 角度误差补偿
以半捷联惯性测量系统为对象进行角速度实测试验。角速度转台带动内筒以3 600°/s转动,转动时间为60 s,采集MIMU的角速度信息,分别用未补偿和补偿后的角速度信息进行姿态解算,并对这两种情况下得到的姿态信息进行对比分析。
MIMU测量到的原始转速ωx2、ωy2、ωz2信息如图5所示。解算出来的系统姿态ψ′、θ′、γ′信息如图6所示。
由图5可看出,由于轴向角度安装误差的存在,当系统绕x0轴转动时,MIMU的y轴和z轴上敏感到幅度约为10°/s的周期角速度信号。
由图6可以看出,由于存在轴向角度安装误差,导致偏航角和俯仰角信息中存在宽度约为0.32°的误差信号,导致系统的姿态测量精度下降。
偏航角信息的边缘局部放大图如图7所示。
由图7可以看出,偏航角姿态信息中的误差信号由两个周期信号叠加而成。经过对偏航信息进行频谱分析得到对应的频谱图,如图8所示。

图5 未补偿的转速信息Fig.5 Speed information without compensation
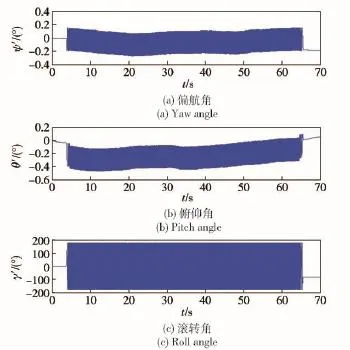
图6 未补偿的姿态信息Fig.6 Attitude information without compensation

图7 偏航角信息边缘局部放大图Fig.7 Partially enlarged detail of yaw angle information

图8 俯仰信号的频谱图Fig.8 Signal spectrum of pitching angle
由图8可看出,俯仰信号的频率分量主要集中在0 Hz、1.7 Hz和10 Hz.经对比分析表明:0 Hz代表偏航信息中的直流分量;1.7 Hz的周期误差信号与内筒摆动频率相同,是在内筒摆动过程中,由内筒与MIMU之间的角度安装误差引入的;10 Hz的周期误差信号与系统转动频率相同,是由前文所述的锥运动引起。

图9 补偿后的转速信息Fig.9 Speed information with compensation
由图9可看出,补偿后,系统y轴和z轴上的角速度信息幅度由补偿前的10°减小到1.5°.

图10 补偿后的姿态信息Fig.10 Attitude information with compensation
由图10可看出,偏航角和俯仰角的周期性测量误差从补偿前的0.32°减小到补偿后的0.05°,减小幅度达到1个数量级,显著地提高了惯性测量系统姿态测量精度。
5 结论
本文基于对半捷联惯性测量系统轴向角度安装误差对姿态信息影响的分析,提出了分级补偿的方法。地面实测试验验证了该理论分析和补偿方法的正确性和有效性。通过对补偿前后的角速度信息和姿态解算信息进行分析比较表明,该补偿方法可将姿态信息中偏航角和俯仰角的信号宽度由补偿前的0.32°减小到0.05°,有效提高了惯性测量系统的姿态测量精度。
(
)
[1] 李杰,赵诣,刘俊,等.高旋弹药飞行姿态测量用半捷联MEMS惯性测量装置研究[J].兵工学报,2013,34(11):1398-1403. LI Jie,ZHAO Yi,LIU Jun,et al.Research on semi-strapdown MEMS inertial measurement device for flight attitude measurement of high-speed rotating ammunition[J].Acta Armamentarii,2013,34(11):1398-1403.(in Chinese)
[2] 鲍亚琪,陈国光,吴坤,等.基于磁强计和MEMS陀螺的弹箭全姿态探测[J].兵工学报,2008,29(10):1227-1231. BAO Ya-qi,CHEN Guo-guang,WU Kun,et al.Research on attitude determination using magnetometers and MEMS inertial sensors[J]. Acta Armamentarii,2008,29(10):1227-1231.(in Chinese)
[3] 中北大学.一种适用于高旋弹药的主动式半捷联惯性测量装置:中国,201110025530[P].2011-08-17. North University of China.One for the high-spin ammunition semiactive strapdown inertial measurement unit:China,201110025530[P].2011-08-17.(in Chinese)
[4] 高峰,张合.基于基准角和补偿角的常规弹药滚转角磁探测算法研究[J].探测与控制学报,2008,30(5):11-15. GAO Feng,ZHANG He.Algorithm of roll angle determination of conventional ammunitions based on benchmark angle and compensation angle[J].Journal of Detection&Control,2008,30(5): 11-15.(in Chinese)
[5] 赵岩,程烘炳,吴训忠,等.基于MEMS的低成本SINS/GPS组合导航系统研究[J].传感器与微系统,2011,30(8):18-21. ZHAO Yan,CHENG Hong-bing,WU Xun-zhong,et al.Study on low cost SINS/GPS integrated navigation system based on MEMS[J].Transducer and Microsystem Technologies,2011,30(8): 18-21.(in Chinese)
[6] 张松,李杰,赵诣,等.半捷联MEMS惯性测量装置数据硬回收系统设计[J].传感技术学报,2013,26(9):1219-1223. ZHANG Song,LI Jie,ZHAO Yi,et al.Design of acquisition and storage system on half-strapdown system[J].Chinese Journal of Sensors and Actuators,2013,26(9):1219-1223.(in Chinese)
[7] 蒋巍巍.基于MEMS的导航系统的初始对准及其相关问题研究[D].沈阳:沈阳理工大学,2013. JIANG Wei-wei.Based on MEMS research on initial alignment in navigation system and its associated problems[D].Shenyang: Shenyang Ligong University,2013.(in Chinese)
[8] 梁勇.基于MEMS的航姿系统的设计与实现[D].哈尔滨:哈尔滨工程大学,2011. LIANG Yong.The design and implementation of navigation posture system based on the MEMS[D].Harbin:Harbin Engineering University,2011.(in Chinese)
[9] 牛春峰,刘世平,王中原.制导炮弹飞行姿态的卡尔曼滤波估计方法[J].中国惯性技术学报,2012,20(5):510-514. NIU Chun-feng,LIU Shi-ping,WANG Zhong-yuan.Approach of Kalman filtering estimation of guided projectile attitude[J].Journal of Chinese Inertial Technology,2012,20(5):510-514.(in Chinese)
[10] 程向红,黄华.捷联惯性系统初始对准中IMU安装误差及陀螺漂移的估计与补偿[J].中国惯性技术学报,2005,12(5):13-15. CHENG Xiang-hong,HUANG Hua.Estimatin and compensation of IMU misalignment and gyros drifts during SINS initial alignment[J].Journal of Chinese Inertial Technology,2005,12(5): 13-15.(in Chinese)
[11] 赵长山,秦永元,夏家和.车载惯导里程仪组合导航系统安装误差标定研究[J].计算机测量与控制,2008,16(10):1393-1395. ZHAO Chang-shan,QIN Yong-yuan,XIA Jia-he.On SINS installation error of a multimode vehicular navigation system[J]. Computer Measurement&Control,2008,16(10):1393-1395.(in Chinese)
Analysis and Compensation of Installlation Axial Angle Errors of Semi-strapdown IMS
ZHANG Xi,LI Jie,HOU Li-peng,ZHU Jing-de,QIN Li
(School of Instrument and Electronics,North University of China,Taiyuan 030051,Shanxi,China)
The source and gemeration mechanism of installation axial angle errors of semi-strapdown inertial measurement system(IMS)and their effects on the attitude measuring accuracy are analyzed,and the mathematical expression of the influence is theoretically derived.A graded compensation method is proposed for error compensation.The proposed method is used to compensate the installation angle errors in turn according to their generation principle and effect mechanism.Experiment based on semi-strapdown IMS verified the validity and effectiveness of the method.Experimental results show that the method can effectively reduce the periodic attitude measuring error caused by installation axial angle errors to 0.05°compared with that of 0.32°without compensation.
ordnance science and technology;semi-strapdown;inertial measurement system;installation angle error;analysis;compensation
TJ06;TJ013
A
1000-1093(2015)07-1222-06
10.3969/j.issn.1000-1093.2015.07.010
2014-06-20
国防基础科研计划项目(B3320132012)
张樨(1977—),女,讲师,博士研究生,E-mail:zhangxi@nuc.edu.cn;李杰(1976—),男,教授,博士生导师,E-mail:lj7610@126.com
