机载双频GPS载波相位定位算法与算例
2015-11-15赵丽莉
赵丽莉,袁 林
(91550 部队,辽宁 大连 116023)
0 引 言
在精度校飞和测控装备验收试验中,双频GPS接收机是目前唯一的真值测量设备,承担着为其他设备提供基准数据的任务。提高双频GPS卫星测量定位精度,可以为精度校飞试验、船载动态试验及测控设备的验收试验提供更好保障[1]。
影响卫星定位精度的因素主要有卫星相关误差、传播相关误差和接收机相关误差等。其中,电离层延迟是卫星测量中最重要的误差源之一。在机载GPS 载波相位差分定位中,通常利用在机场附近设立的一个基准站与机上移动站形成的短基线条件固定模糊度,使定位精度达到厘米级。但随着飞机起飞后基线距离增大,高度差增大,导致电离层和对流层延迟残差增大,模糊度固定和定位精度都将受到影响。同时卫星失锁,新星升起也都需要重新固定模糊度,飞机动态条件下的周跳检测方法也有别与传统静态周跳检测方法。这些都成为阻碍机载GPS 定位精度达到分米级的关键因素。文中利用适用于双频GPS 观测的电离层残差法和M-W 组合来探测周跳[2],当出现周跳时把该周跳当作新星升起,重新搜索模糊度。对电离层延迟残差,利用电离层浮点模型[3],将每对卫星对应的电离层延迟残差参数化,与模糊度参数、位置参数同时求解。对双差对流层延迟残差也可以同样参数化,但求解精度取决于卫星几何分布[4],文中将直接使用经验模型改正。对模糊度,利用Kalman 滤波求解双频GPS 双差方程得到浮点解和协方差阵,利用LAMBDA 算法固定模糊度。新星升起时,将在保持其他卫星模糊度的基础上,仅初始化该新星模糊度,以此加快模糊度搜索。
1 算法模型
1.1 双频GPS 双差方程
两台接收机设为k 和l,卫星设为i 和j,双频GPS 观测双差方程为
式中:Φ1,Φ2为两个频段相位;P1,P2为伪距观测值;λ1,λ2分别为L1,L2频段波长;ρ 为卫星天线和接收机天线间的几何距离;I/f2为一阶电离层延迟残差;T 为对流层延迟残差;N1,N2为两个频段双差模糊度;ε,e 为测量噪声。式中忽略了天线相位中心偏差和多路径效应。
1.2 扩展Kalman 滤波
文中用扩展Kalman 滤波求解GPS 双差方程,方程(1)线性化为

式中:Yk为观测量与计算量之差;Vk为观测噪声,且满足E(Vk)=0,cov(Vk,Vj)=Rkδkj。对载波相位和伪距,R 为仰角相关权阵[5];H 为设计矩阵;δX 为待估参数向量,包括位置分量参数、电离层和对流层延迟残差以及两个频段双差模糊度。
系统状态方程为

式中:Wk-1为系统噪声,满足E(Wk-1)=0,cov(Wk,Wj)=Qkδkj,状态转移矩阵为

由此,以伪距双差解算的结果作为位置参数初值,根据扩展Kalman 滤波递推公式,可以求解方程(1),得到模糊度浮点解和协方差阵,用LAMBDA 算法[6]即可固定整周模糊度。文中采用了比值检验确定整周模糊度。如果连续多个历元的次小残差平方和与最小残差平方和的比值大于2,则整周模糊度被正确固定。若不发生周跳或残差变大,可以保持模糊度。当周跳发生或新星升起时,仅给该卫星双差模糊度松约束,保持其他卫星模糊度强约束,以保证在长基线时能快速固定新星模糊度[7]。
1.3 周跳检测
GPS 动态测量中,周跳的探测与修复方法有很多,文中利用电离层残差法和M -W 组合探测周跳[2]。消除了卫星星历误差、接收机及卫星钟差和几何项影响的电离层残差。组合观测方程:
为判断历元间是否发生周跳,对上述电离层残差组合在历元间求差:

不发生周跳时,ΔN1= ΔN2=0,ΔΦI为一小量,可用来检测周跳。但其不能检测的周跳。这时可以用M-W 组合检测周跳,M -W组合观测值为

宽巷模糊度为

其历元间差为

同样,无周跳时,ΔNw为一随机小量,可用来探测周跳,并可以与电离层残差法互补缺陷。文中并不修复周跳,而是把周跳当作新星处理,重新固定其模糊度。
1.4 大气延迟残差
飞机起飞一段距离后,机载GPS 处于中长基线下,电离层、对流层延迟残差较大,严重影响模糊度固定。解决方法是:对电离层延迟残差采用电离层浮点模型,将双差电离层延迟残差参数化,与位置参数和模糊度参数同时求解,以此消除电离层延迟残差影响。对对流层延迟残差,可以把模型改正后的残差参数化,与位置参数同时求解,但其求解精度与卫星几何分布[8]相关。文中采用对流层经验改正模型[9-10]。
2 试验数据分析
以某次飞行任务为例,装备一台双频接收机作为基准站接收机在机场附近,记作M 接收机,装备两台双频接收机在飞机上作为动态测量接收机,记作R1 和R2。两接收机间距离固定为24.40 m,飞机停在跑道上时基线长度约为240 m。动态接收机初始化12 min,采样率为1 Hz,卫星截止高度角为28°。接收机提供四种观测数据C1,L1,L2,P2。飞机航路如图1 所示,R1 站高程如图2 所示,各卫星仰角如图3 所示。采用SAAS 模型[9]和Neill映射函数[10]对对流层延迟进行模型修正。取标准大气条件,相对湿度0.5。
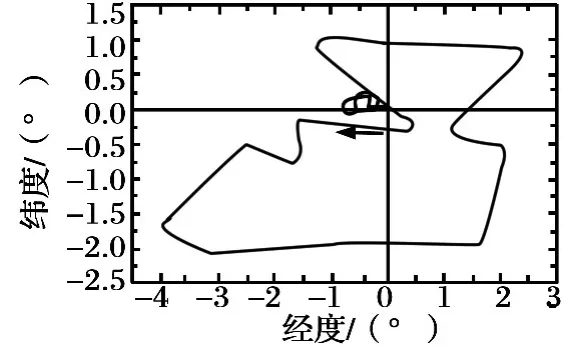
图1 飞机航路图
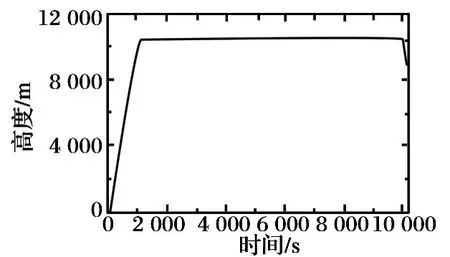
图2 飞机高程图
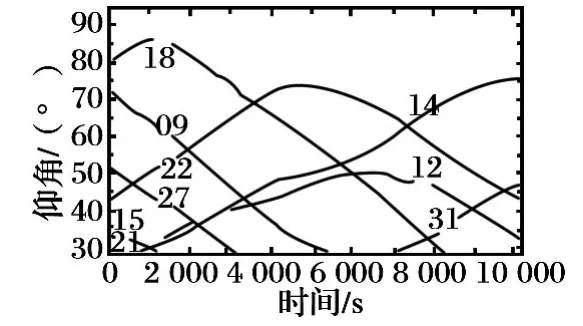
图3 卫星仰角
对MR1 基线,其卫星数和模糊度固定情况如图4 所示,可以看出,由新星升起或残差过大导致模糊度需重新固定的计算时间小于50 s。文中在模糊度固定之后,利用消电离层组合作为观测量,进行扩展Kalman 滤波得到移动站定位结果。同样,可以计算得到MR2 定位结果,利用MR1 基线和MR2 基线做差得到R1 -R2 基线距离如图5 所示。可以看出其与真值的差别在分米级。而把R1 当作移动基准站,计算R1-R2 基线,得到的移动基线R1 -R2 间的距离,从图5 中可以看出其与两基线差得到的R1-R2 距离相当一致。
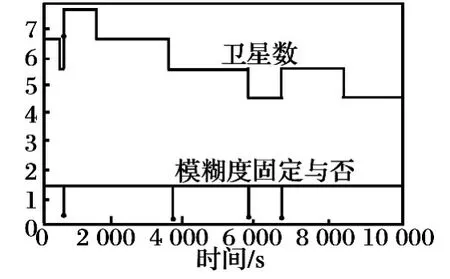
图4 MR1 基线卫星数和模糊度固定情况(0 代表不固定,1 代表固定)
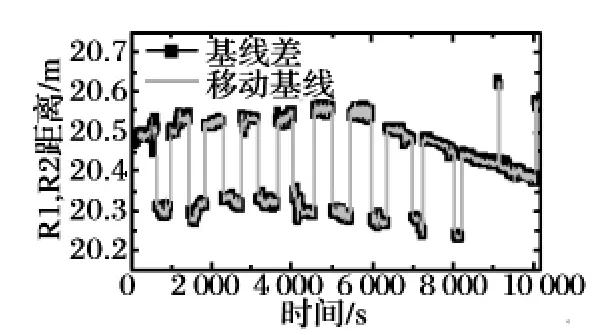
图5 两移动站R1,R2 之间的距离
3 结 论
文中利用电离层残差法和M-W 组合来探测双频GPS 载波周跳,并把周跳当作新星升起,重新搜索模糊度。用电离层浮点模型,将每对卫星对应的双差电离层延迟残差参数化,与位置参数、模糊度参数同时求解,以此消除电离层残差影响;用对流层经验模型改正对流层延迟。并用扩展Kalman 滤波和LAMBDA 算法求解模糊度,研究机载双频GPS 定位精度。算例结果表明,利用文中所述方法能有效检测出双频GPS 周跳,并在50 s 内恢复新星模糊度,利用两条固定站-移动站基线得到的两机载移动站间的距离与利用移动站-移动站基线计算得到的基线距离一致,与真值差别在分米级。文中的算法和算例具有通用性,对未来北斗二代卫星定位系统具有一定的指导意义和应用价值。
[1]王正明,易东云,周海银,等. 弹道跟踪数据的校准与评估[M].长沙:国防科技大学出版社,2008.
[2]黄丁发,熊勇良,袁林果. 全球定位系统—理论与实践[M].成都:西南交通大学出版社,2006.
[3]Yu Xingwang,Zhang Xiaohong,Liu Jingnan,et al. Performance Assessment of Long Baseline Integer Ambiguity Resolution with Different Observation Models[C]//24th International Technical Meeting of the Satellite Division of the Institute of Navigation,Portland OR,2011.
[4]刘立龙. 动态对动态GPS 高精度定位理论及其应用研究[D].武汉:武汉大学,2005.
[5]Tiberius CCJM,Kenselaar F. Estimation of the Stochastic Model for GPS Code and Phase Observables[J]. Survey Review,2000,35(277):441 -454.
[6]李征航,张小红. 卫星导航定位新技术及高精度数据处理方法[M]. 武汉:武汉大学出版社,2013.
[7]袁林,吴胤林,战杰.中长基线下机载GPS 定位模糊度动态结算方法研究[J].航空兵器,2013 (5):22 -25.
[8]Vyas M R,Lim S,Rizos C,et al. Analysis of Zenith Path Delay in Dynamically Changing Environment[C]//IGNSS Symposium,Australia Sydney,2011.
[9]Saastamoinen J. Contributions to the Theory of Atmospheric Refraction[J]. Bulletin Geodesique,1973,107(1):13-34.
[10]张守信. GPS 技术与应用[M]. 北京:国防工业出版社,1999.
