基于3DMAX的T字形工件自动化焊接路径与程序
2015-11-03王绍胜桑海涛顿国强冯夷宁
曲 芳, 王绍胜, 桑海涛, 顿国强, 冯夷宁
(1.黑龙江科技大学 工程训练与基础实验中心, 哈尔滨 150022; 2.东北农业大学 工程学院, 哈尔滨150030; 3.黑龙江科技大学 现代制造工程中心, 哈尔滨 150022; 4.黑龙江科技大学计算机与信息工程学院, 哈尔滨 150022)
基于3DMAX的T字形工件自动化焊接路径与程序
曲芳1,2,王绍胜3,桑海涛4,顿国强2,冯夷宁2
(1.黑龙江科技大学 工程训练与基础实验中心, 哈尔滨 150022; 2.东北农业大学 工程学院, 哈尔滨150030; 3.黑龙江科技大学 现代制造工程中心, 哈尔滨 150022; 4.黑龙江科技大学计算机与信息工程学院, 哈尔滨 150022)
为了减小T字形工件自动化焊接装夹过程中产生的误差,运用3DMAX软件模拟T字形焊缝的焊接过程,并在奥地利IGM公司的RTI330型焊接机器人实机上进行实验。通过接触式喷嘴传感器3个方向的寻找路径,确定出T字形工件和焊缝的准确位置,并在TABLE&TILT工作台上确定该传感器的寻找范围。最终,优化了T字形工件自动化焊接程序,并在工件上试焊取得了良好的效果。该研究表明,在焊前可以实现对焊缝的寻踪定位,保证自动化焊接质量的稳定性和准确性,提高焊接作业的生产效率,对于T字形焊缝自动化焊接程序编制和工艺参数优化具有一定的指导意义。
焊接; 3DMAX模拟仿真; 寻找路径; 寻找范围
0 引 言
随着我国航天和国防力量的迅猛发展,自动化焊接技术被越来越多地应用到重点攻关项目和特种加工制造领域[1]。自动化焊接主要用于精密和超精密零部件的制备,因此,在机械焊接领域中大力推广和积极应用自动化焊接技术并努力提高其焊接产品的质量,优化其焊接程序[2]和工艺参数,使焊件的精度和准确度达到国家的标准和要求,是满足当前社会需求与行业发展需要的必要条件。
以实验室现有的奥地利IGM公司RTI330型自动化焊接机器人为例,在T字形工件批量生产过程中,由于同一操作者手动装夹不同工件时,均存在细微的装夹误差,不同操作者装夹时则误差更大。这一误差由于微小往往被忽略掉,对于精密焊接来说是不能满足要求的[3-4]。因此,为了有效减少人为因素的影响,减小T字形工件自动化焊接装夹过程中产生的误差,笔者对T形工件自动化焊接的寻找路径进行合理规划,利用3DMAX软件离线模拟寻找路径,并进行喷嘴碰撞变色测试。
1 自动化焊接寻找路径规划
1.1焊接机器人仿真模型建立
利用3DMAX7.0软件,建立RTI330型自动化焊接机器人三维模型,在机器人工作台TABLE&TILT上建立T字形工件模型,如图1所示。
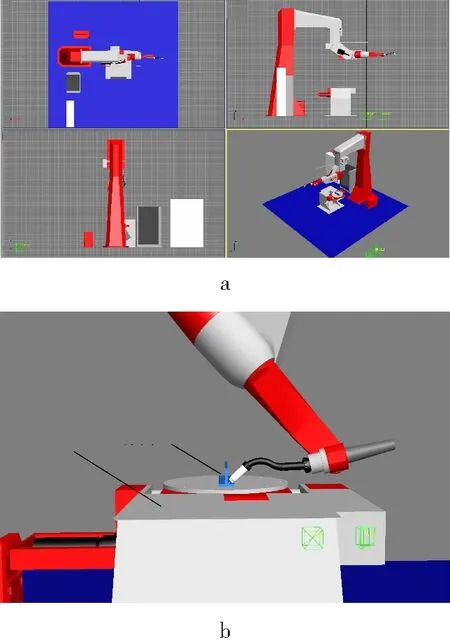
图1 自动化焊接机器人仿真模型Fig. 1 Simulation model of RTI330 automatic welding robot
其中,图1a为焊接机器人的三视图和立体图,图1b为T字形工件模型。
1.2T字形工件自动化焊接寻找路径规划
T字形工件装夹过程中产生的误差,可以看做是工件在三维坐标系内的平移。因此,在寻找工件所在位置的路径设计过程中,可以沿着三个方向x、y、z方向的寻找路径,确定T字形工件所在位置。由于T字形工件和焊缝的相对位置是固定的,所以可以确定T字形焊缝所在位置,如图2所示。
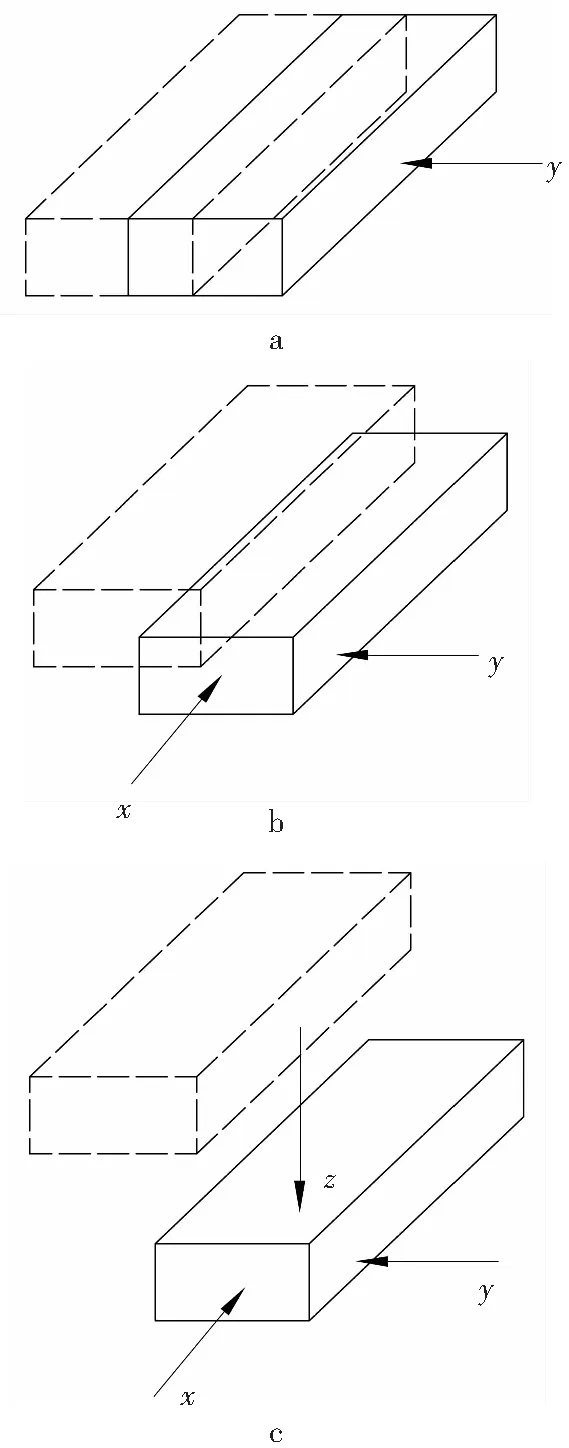
图2 T字形工件自动化焊接路径规划Fig. 2 Automatic welding path plan for T-shaped work piece
1.3离线模拟仿真及喷嘴碰撞测试
在示教器下控制焊接机器人3DAMX模型实现离线仿真运动,沿着x、y、z三个方向的寻找路径进行工件平面所在位置的寻找工作,并进行焊枪喷嘴碰撞工件表面实验。如果焊枪喷嘴碰撞到工件表面,则工件和焊枪喷嘴均有颜色变化,如图3~图5所示。其中,图3a为焊接机器人沿x方向的寻找路径进行寻找,图3b为焊接机器人喷嘴沿着x方向寻找工件时碰撞到工件表面的变色实验;图4a为焊接机器人沿y方向的寻找路径进行寻找,图4b为焊接机器人喷嘴沿着y方向寻找工件时碰撞到工件表面的变色实验;图5a为焊接机器人沿z方向的寻找路径进行寻找,图5b为焊接机器人喷嘴沿着z方向寻找工件时碰撞到工件表面的变色实验。
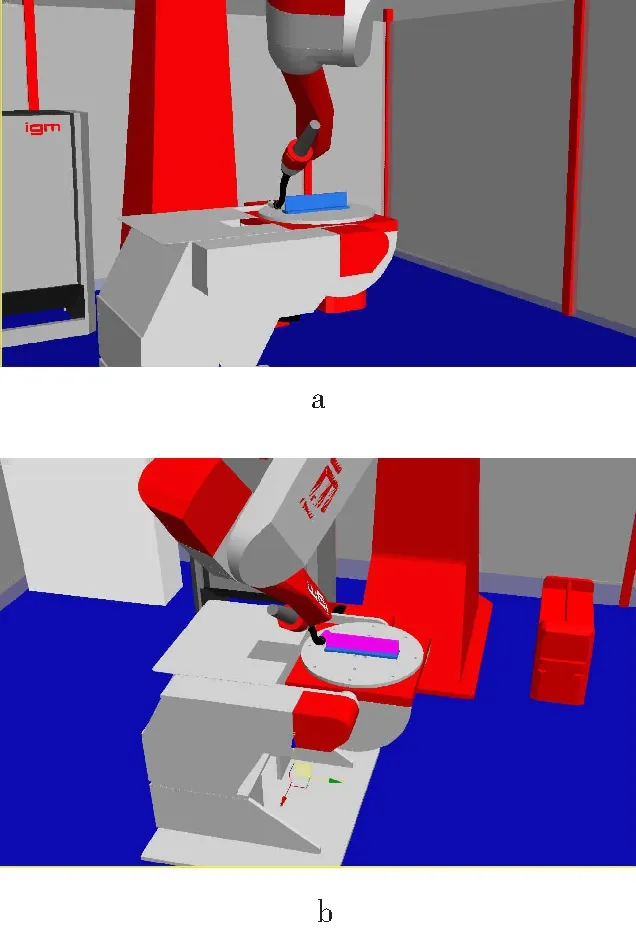
图3 x方向寻找路径和碰撞测试

图4 y方向寻找路径和碰撞测试
通过离线模拟仿真实验及焊枪喷嘴碰撞测试,可以在进行自动化焊接机器人实机操作时有效保护焊枪喷嘴,减少喷嘴碰撞掉电,提高在线焊接效率,缩短在线编程时间。同时,增加了感性认识,奠定了学生的研究基础,提高了学生的实践能力。

图5 z方向寻找路径和碰撞测试
2 自动化焊接程序优化设计
2.1T字形工件自动化焊接路径在线验证
利用RTI330型焊接机器人焊枪喷嘴上安装的接触式喷嘴传感器,如图6所示,可以对T字形工件的焊缝实现寻踪定位,把部分步点程序作为一个整体在空间内做三维平移,如果工件定位不精确,利用喷嘴寻找工件,即可得出焊缝的位置变化量,从而在程序中的对应部分做相应数量的平移,减小由于同一操作者和不同操作者手动装夹工件时存在的装夹误差,进而保证T字形工件焊接的准确性和稳定性[5-15]。
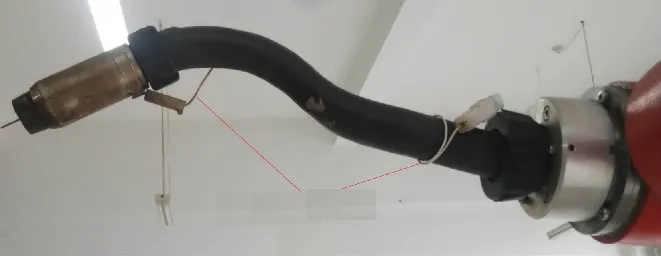
图6 接触式喷嘴传感器
在3DMAX软件离线模拟仿真及喷嘴碰撞测试过程中,编制的程序可以直接应用于RTI330型焊接机器人操作系统。在该程序的控制下,RTI330型焊接机器人能够在线验证x、y、z三个方向的寻找路径,并进行工件所在位置的寻找工作,如图7所示,从而准确确定出T字形焊缝所在位置。
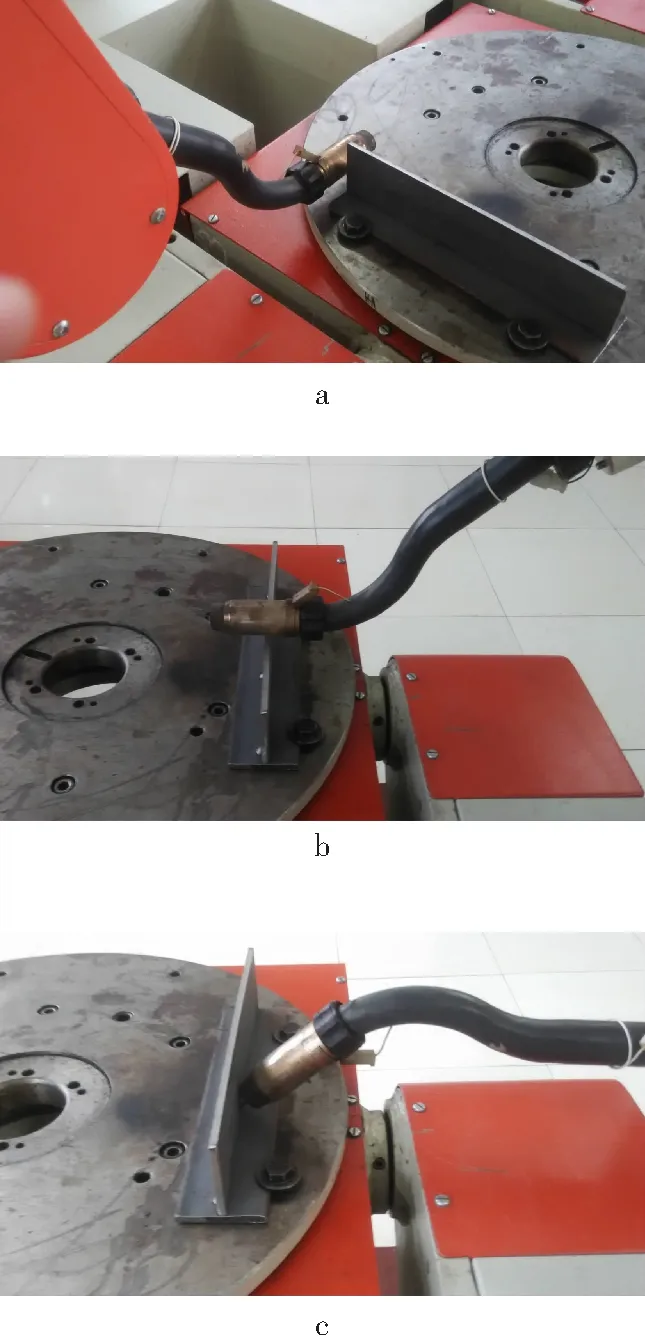
图7 T字形工件自动化焊接路径在线验证
Fig. 7Online verification of automatic welding path for T-shaped work piece
2.2 确定传感器寻找范围
在焊枪喷嘴上电状态下,沿着x轴方向平移±40 mm的距离,沿着y轴方向平移±70 mm的距离,焊接机器人的接触式喷嘴传感器均能够找到工件所在位置,如图8所示。其中图8a为工件处在坐标系原点O处,焊枪喷嘴寻找工件端面所在位置图;图8b为工件沿着x轴方向平移40 mm的距离,焊枪喷嘴能够寻找到工件端面所在位置,反向亦然;图8c为工件沿着y轴方向平移70 mm的距离,焊枪喷嘴能够寻找到工件端面所在位置,反向亦然;图8d为工件先沿着x轴方向平移40 mm距离,再沿y轴方向平移70 mm的距离,焊枪喷嘴依然能够寻找到工件端面所在位置,反向亦然。
2.3焊接实验效果分析
将T字形工件装夹在坐标系原点O处,利用喷嘴寻找程序寻找并试焊工件,再将工件沿着y轴方向平移60 mm距离,按照喷嘴寻找程序寻找平移后工件所在位置,试焊平移后的T字形工件,平移前、后焊缝均焊接在距离工件左侧端面40 mm的焊接起始点位置处,两者的对比效果如图9所示。
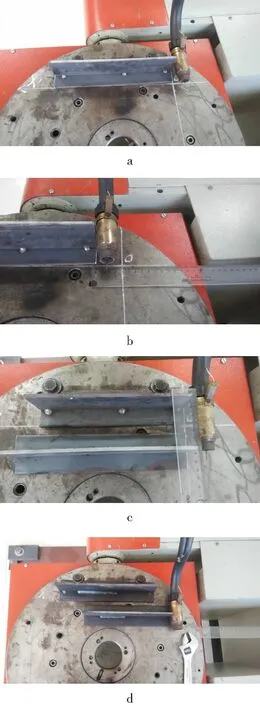
图8 T字形工件沿x、y方向平移喷嘴寻找工件端面
Fig. 8Nozzle to look for end of T-shaped work piece translation alongx,y

图9 T字形工件平移前、后焊接效果对比
Fig. 9Comparison of welding effect of T-shaped work piece with translation before and after
2.4程序优化设计
一般T字形工件自动化焊接程序包括4个步点,如图10和表1所示。图10中1~4号步点为一般T字形工件焊接程序所需步点,虚线为空中行走步点,不执行实际焊接,而实线为焊接工作步点,执行实机焊接工作。这样编制的程序在实际焊接时,存在装夹误差,往往会影响焊接效果,使焊接质量达不到使用要求。
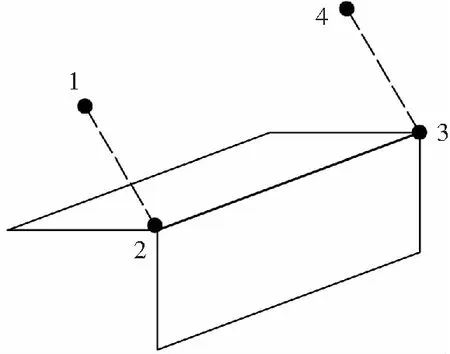
图10 一般T字形工件焊接程序
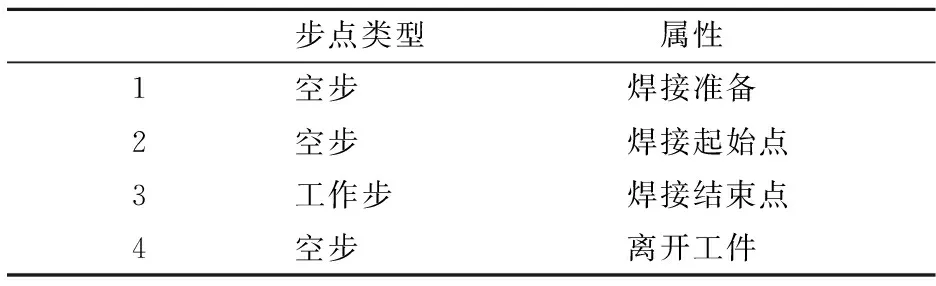
步点类型 属性1空步焊接准备2空步焊接起始点3工作步焊接结束点4空步离开工件
利用喷嘴寻找电弧传感技术重新设计的焊接程序,其步点路径规划如图11所示,图11中1~12号步点为喷嘴寻找程序所需步点,虚线为空中行走步点,实线为焊接工作步点。图11中箭头为三个方向的寻找路径,实线为T字形焊缝的焊接路径。
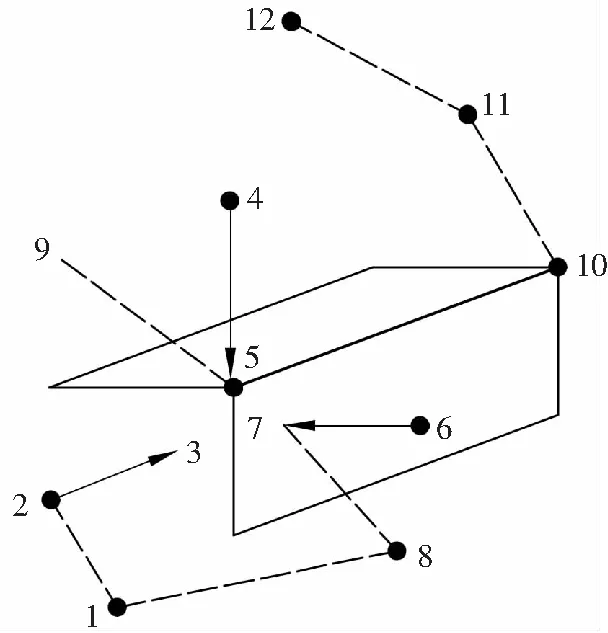
图11 喷嘴寻找程序的步点路径规划
Fig. 11Step path planning of search nozzle for program
焊枪喷嘴寻找程序在设计时分为寻找和位移2个模块。其中,寻找块由空步步点组成,不执行实际焊接,它包括寻找开始、寻找中介、寻找组1、寻找结束等步点。位移块由空步步点和工作步点组成,工作步点执行实际焊接,它包括位移开始、位移结束和焊接结束点等。程序优化后焊枪喷嘴寻找程序的步点信息见表2。
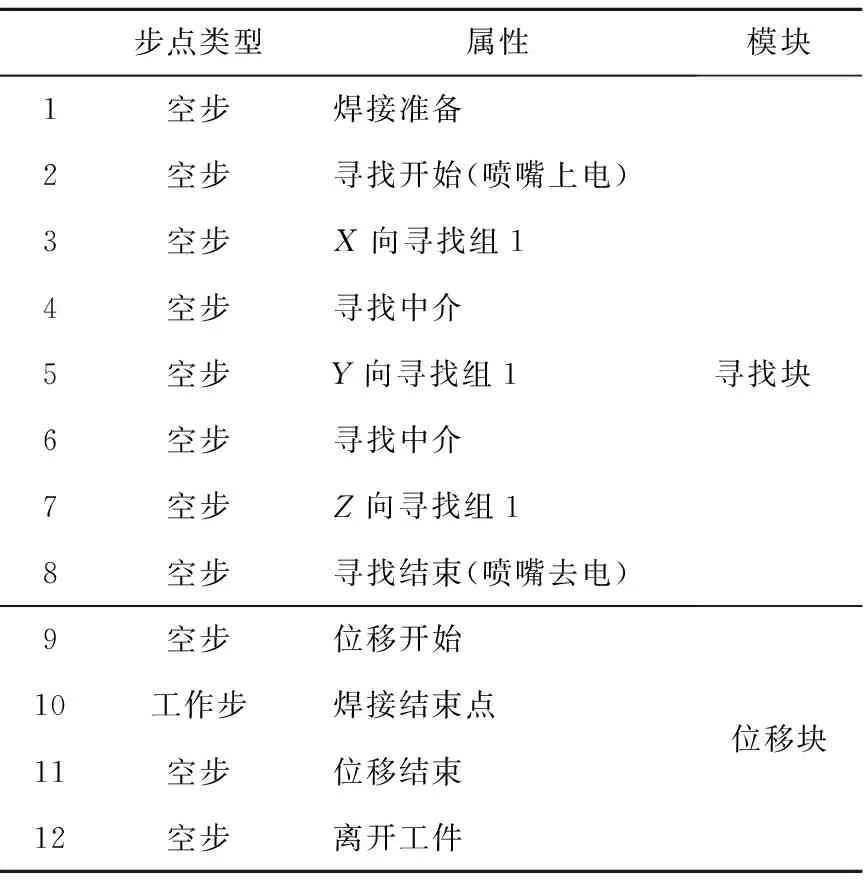
表2 优化后步点信息
3 结束语
T字形工件自动焊接通过离线模拟仿真和在线上机实验的方式,对寻找路径进行了合理规划,优化了焊枪喷嘴寻找电弧传感程序,确定接触式喷嘴传感器的寻找范围。即沿着x轴方向可平移±40 mm误差,沿着y轴方向可平移±70 mm误差。且工件沿着y轴方向平移前、后,焊枪喷嘴均能够在寻找程序引导下,将焊缝焊接在距离工件左侧端面40 mm的焊接起始点位置处,验证了喷嘴寻找程序的可行性。该项研究,可以提高自动化焊接作业效率,为提高焊接产品质量的稳定性和准确性奠定了坚实基础,为精准焊接装备的设计及应用提供了合理化建议,为进一步探讨自动化焊接工艺参数优化工作提供实用参考与技术支持。
[1]李东光. 自动化焊接技术及其发展探讨[J]. 中国高新技术企业, 2015(2): 78-79.
[2]曲芳, 孟庆强. 基于人机工程学的采煤机械设计研究[J]. 机械制造, 2013, 53(1): 30-32.
[3]曲芳, 张艳, 宁姗, 等. 基于ADAMS的可变履带式井下探测机器人研究[J]. 工业仪表与自动化装置, 2014(12): 115-120.
[4]QU FANG, CHEN GUOHUI, NING SHAN, et al. Simulation analysis for the walking mechanism of the underground exploration robot based on MATLAB and ADAMS[J]. Applied Mechanics and Materials, 2014(12): 705-708.
[5]曲芳, 宁姗, 张艳, 等. 基于ANSYS的轻型矿车车箱优化设计[J]. 工业仪表与自动化装置, 2014(3): 19-22.
[6]刘翠霞. 基于正交实验旋转电弧传感器焊缝跟踪工艺参数的优化[J]. 电焊机, 2010, 40(6): 57-61.
[7]曲芳, 明向兰. 基于回归分析法的黑龙江省人口预测及应用[J]. 工业仪表与自动化装置, 2015(3): 66-68.
[8]曲芳, 马晓梅, 梁志强, 等. 机器人实践教学研究初探[J]. 机械职业教育, 2014(2): 31-33.
[9]陈陟悠, 胡彬, 曹伟. IGM330型焊接机器人手动校点在大功率机车侧梁上的应用[J]. 焊接技术, 2010, 39(3): 41-44.
[10]曲芳, 郝帅, 张蕊, 等. 一种矿车车箱的多种轻质设计比较[J]. 机械工程师, 2014(2): 88-90.
[11]LI D G,LIU C S. Development and experiment of cutting force model on conical pick cutting rock at different wedge angles[C]// Proceedings of the 2015 International Conference on Mechanics and Mechatronics. Singapore: World Science, 2015:11-18.
[12]曲芳, 李巍. 基于ANSYS的土壤分层取样装置优化设计研究[J]. 机械工程师, 2015(8): 10-12.
[13]LI D G,LIU C S. Conical pick cutting experiment and resistance spectrum characteristics[C]// Proceedings of the 2015 International Conference on Mechanics and Mechatronics. Singapore: World Science, 2015:19-25.
[14]曲芳, 顿国强, 沈斌, 等. 基于Multi-Agent协作的井下机器人智能搜救系统[J]. 黑龙江科技大学学报, 2015, 25(4): 440-444.
[15]曲芳, 张艳, 宁姗, 等. 纤维增强复合材料在探测机器人主车体上的应用[J]. 机械制造, 2015, 53(5): 33-35.
(编辑徐岩)
Path planning and program design for automatic welding of T-shaped work piece based on 3DMAX
QUFang1,2,WANGShaosheng3,SANGHaitao4,DUNGuoqiang2,FENGYining2
(1.Center for Engineering Training & Basic Experimentation, Heilongjiang University of Science & Technology,Harbin 150022, China; 2.Engineering Institute, Northeast Agricultural University, Harbin 150030, China;3.Modern Manufacturing Engineering Center, Heilongjiang University of Science & Technology, Harbin 150022, China;4.School of Computer & Information Engineering, Heilongjiang University of Science & Technology, Harbin 150022, China)
This paper describes a study aimed at reducing the error due to the process of automatic welding of the T-shaped work piece. This study consists of using 3DMAX software to simulate the welding process of the T-shaped work piece and performing test on the RTI330 welding robot of IGM company in Austria; determining the accurate position of the T-shaped work piece and the welding seam, by looking for the path of the three direction of the contact nozzle sensor and identifying the range of the sensor on the workbench of TABLE&TILT; and ultimately optimizing the automatic welding procedure of T-shaped work piece and thereby producing a better effect. This method capable of the pursuit of actual weld positioning before welding can provide the greater stability and accuracy of automatic welding quality, coupled with improved productivity of welding operations, thus contributing to the T-shaped seam automatic welding programming and optimization of process parameters.
welding; 3DMAX simulation; search path; search range
2015-08-16
国家自然科学基金项目(51504088);黑龙江省教育厅科学技术研究项目(12541710;12533057)
曲芳(1983-),女,山东省蓬莱人,讲师,博士研究生,研究方向:机械设计及理论、焊接自动化理论、农业机械化工程,E-mail:qufangnihao@163.com。
10.3969/j.issn.2095-7262.2015.05.022
TP430.10
2095-7262(2015)05-0573-06
A
