基于大型农用机械EPS的电机驱动芯片A4935的应用
2015-10-21李志鹏史松卓
李志鹏 史松卓


摘要 以A4935芯片为电机驱动控制芯片,以TMS320F28035 DSP为控制核心设计了一种用于大型农用机械转向系统的电机控制电路,通过试验验证,当大型农用机械转向时,通过调节电机的占空比很好地缓解了转向沉重的现象。
关键词 大型农用机械;A4935驱动芯片;DSP
中图分类号 S24 文献标识码
A 文章编号 0517-6611(2015)03-355-03
Application of Large Agricultural Machinery and Motor Drive Chip A4935 Based on EPS
LI Zhipeng, SHI Songzhuo*
(College of Transportation, Northeast Forestry University, Harbin, Heilongjiang 150040)
Abstract Taking the A4935 chip for motor drive control chip, with TMS320F28035 DSP as the control core to design a steering motor control circuit system for large agricultural machinery. Through the experiment, when the large agricultural machinery steering motor, adjusting the duty ratio can ease the phenomenon of heavy steering.
Key words Large agricultural machinery; A4935 driving chip; DSP
目前,大型农用机械在提高生产效率和节约土地资源的方面发挥着举足轻重的作用。但是,由于这些机械的体积和质量较大,在转向时会使驾驶员产生转向沉重的感觉,从而影响驾驶员对机械控制的稳定性,影响正常的农业生产。为了解决这一问题,笔者以A4935为电机控制芯片,设计了一种转向助力系统,通过观察助力电机的输出占空比,证明该系统能够很好地改善转向沉重的现象,增加驾驶员对机械操纵控制的稳定性。
1 A4935的功能特点
1.1 主要特点
A4935是美国Allegro公司生产的新型N沟道3相MOSFET控制器,主要用于汽车和大型农用机械的大功率助力电机领域。它具有独特的电荷泵稳压器,能够提供完整的门驱动,使电池电压从10 V下降到7 V,并可使A4935栅极驱动电压下降至5.5 V。A4935的自举电容器用于提供N沟道MOSFET需要的电池电源电压。三相全桥逆变电路控制所有6个功率MOSFET管,可以使用电机驱动换向块或正弦激励使三相全桥逆变电路导通。A4935芯片内部集成交叉控制保护和可调电阻保护,有睡眠模式和空闲模式和低电流休眠模式3种工作模式,可以进行制动功能和死区时间设置,同时可通过功率管交叉传导的方式控制死区时间。芯片的电桥电流测量可以使用一个集成的电流检测放大器。由外部电阻定义增益和失调量。同时芯片还具有不受约束的电流检测放大器的功能。
2 A4935的结构特征
2.1 通电控制规律
A4935内部包含全桥驱动的逻辑控制单元,通过PWMH端和PWML端和COAST端能够实现各种各样的三相桥式电路控制。采用正弦电流控制,每个FET管的三相都可以不通过PWM和COAST被单独控制。这就要求性能更高的外部控制器提供各相的PWM输出,如果需要全面控制外部死区时间,这需要6个PWM输出,每个FET管需要一个。在PWM关断期间,互补场效应晶体管被打开将体二极管短路,并提供同步整流。表1为A4935全桥驱动的通电规律。
表1 A4935全桥驱动通电规律
输入RDEADRESETCCENCOASTPWMHPWMLxHIxLO输出GHxGLxSx
x1xxxx00LLZ
x1x11101LHLS
x1x11110HLHS
>0.2 V1xxxx11LLS
x1x10101LHLS
x1x10110LHHS
x1x11001HLHS
x1x11010HLHS
x1x10001HLHS
x1x10010LHLS
AGND1x11011HLHS
AGND1x10111LHLS
作者简介 李志鹏(1963- ),男,教授,博士生导师,从事农产品采摘机和农业机械转向控制技术研究。*通讯作者,硕士,从事机电一体化研究。
收稿日期 20140000
2.2 自举电容的选取
自举电容CBOOT的选取关系到A4935能否正确的运行,如果电容值过高,会导致充电时间过长,增大PWM占空比的频率;如果电容值偏小,由于电荷共享,电荷从CBOOT转移到FET管的栅极时会产生很大的电压降,为了减小电压降,自举电容
CBOOT的电压值VBOOT要远大于FET管栅极的电压值QGATE一般采用CBOOT=20QGATF,下式为CBOOT的计算公式:
QBOOT=CBOOT×VBOOT=QGATE×20
2.3 制动控制
A4935可以用来强制执行关闭所有FET的高低电平端,或者迫使所有FET管的低电平端关闭,高电平端动态制动。这种制动方式可以产生一个制动扭矩,适用于采用反电动势法檢测转子位置无位置传感器无刷电机,制动时负载电流可以近似为:
IBEME=VBEMERL
3 A4935的應用电路
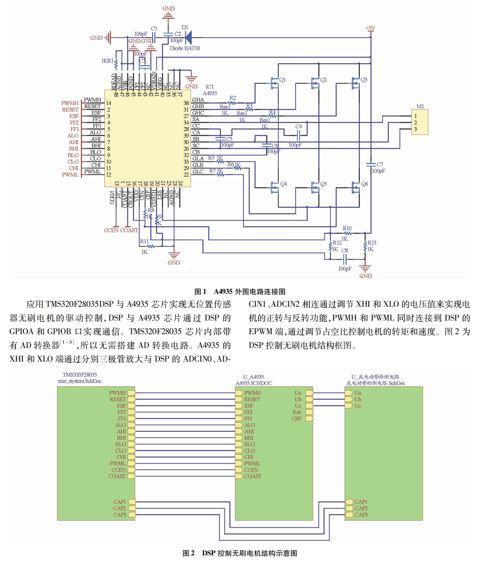
A4935无刷直流电动机驱动集成电路由于其集成度高, 外围元件少, 使用起来非常简便。其外围电路连接如图1所示。
图1 A4935外围电路连接图
应用TMS320F28035DSP与A4935芯片实现无位置传感器无刷电机的驱动控制,DSP与A4935芯片通过DSP的GPIOA和GPIOB口实现通信。TMS320F28035芯片内部带有AD转换器[1-3],所以无需搭建AD转换电路。A4935的XHI和XLO端通过分别三极管放大与DSP的ADCIN0、ADCIN1、ADCIN2相连通过调节XHI和XLO的电压值来实现电机的正转与反转功能,PWMH和PWML同时连接到DSP的EPWM端,通过调节占空比控制电机的转矩和速度。图2为 DSP控制无刷电机结构框图。
图2 DSP控制无刷电机结构示意图
由于无位置传感器电机内部无位置传感器,所以需要外接电机转子位置监测电路[4-5]。图3为电机反电动势检测电路图,电机输出端电压信号首先通过左边框图构成的低通滤波电路消除高频噪声,C2为隔直电容用来消除三相电压不对称所产生的零点漂移。电路的主体部分为右边框图构成的电压滞回过零比较器,比较器的翻转点与电机的换相时刻相对应。比较器的输出信号为±15 V的方波信号,DSP的捕捉模块接口CAP的输入电压为0~3.3 V,因此比较器的输出信号需经过光耦合器件整形,信号最终被DSP的CAP引脚捕获。原理图中的稳压二极管D1起到保护DSPI/O的作用。
4 试验验证
图4为电机转至左极限时的PWM波形,与之相对应的电机输出电流值为图5所示,电流值为31.1 A。图6所示的PWM波形为电机转至右极限时的PWM波形,与之相对应的电机输出电流值为图7所示,电流值为-31.2 A。无刷电机能够提供的电流为31 A左右,这就大大提高了电机提供的助力扭矩,使EPS系统能够应用在大型农用机械上。
5 结束语
该设计所使用的无刷电机为额定功率600 W,额定电压12 V的电机,A4935芯片能够使电机稳定工作,芯片能够承受30A至40A的较大电流,通过示波器观察,电机输出的PWM稳定,能够很好的改善大型农用机械转向沉重的现象。
参考文献
[1]
魏志成.基于DSP的永磁无刷直流电动机控制系统的研究[D].武汉:武汉科技大学,2012.
[2] 贺益康,阮涛.无位置检测器永磁无刷电机的控制[J].微电机,1990(4):10-15.
[3] Texax instruments Company TMS320F2803x (picceoloTM) MCU sdatasheet [EB/OL].(2009-10-25)http://focus.ti.com/docs.
[4] 张鸿静.基于DSP的无位置传感器无刷直流电机控制系统[J].燕山大学学报,2006,30(3):206-211.
[5] 张相军,陈伯时,朱平平,等.直流无刷电机无位置传感器控制中反电动势过零检测算法及其相位修正[J].电气自动化,2003(3):16-19.
