应用于超声清洗的步进电机直线运动定位系统
2015-10-21刘宁
刘宁
【摘 要】步进电动机用脉冲信号控制,步距角和转速不受电压波动和负载变化的影响,仅与脉冲频率成正比,通过改变脉冲频率的大小可以调节电机转速,并能实现快速起动、制动、反转,不需要机械制动装置,而且有位置保持能力,不经减速器也可低速运行。主要用于数字控制系统中,精度高,运行可靠。配合相应的传感器,可实现闭环控制。
【关键词】步进电机;步距角;闭环控制;脉冲信号
1.应用背景
在超声波清洗机的工作过程中,为了提高工作效率,减轻工人工作负荷,實现清洗过程自动化,设计了该直线运动定位系统。该系统可以实现沿直线方向的往复运动,运动过程中任意时刻,可改变运动方向及运动速度,亦可快速定位到运动范围内的特定位置。
2.硬件及结构组成
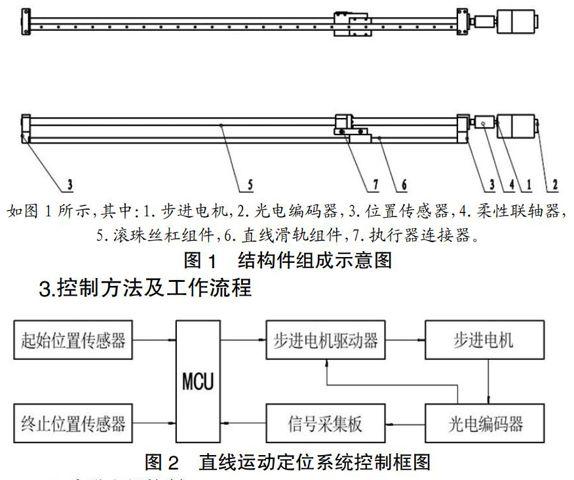
该系统硬件组成主要包括:单片机、步进电机驱动器、步进电机、光电编码器、位置传感器、柔性联轴器、滚珠丝杠组件、直线滑轨组件、执行器连接器。
如图1所示,其中:1.步进电机,2.光电编码器,3.位置传感器,4.柔性联轴器,5.滚珠丝杠组件,6.直线滑轨组件,7.执行器连接器。
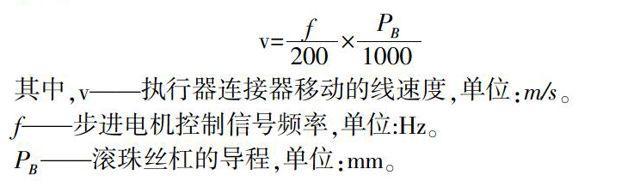
3.控制方法及工作流程
3.1步进电机控制
选用两项四线混合步进电机,步进电机的步距角为1.8°。步进电机旋转一周所需的脉冲数为:n=360°/1.8°=200。步进电机控制信号由单片机根据不同的转速要求发出相应频率的脉冲给步进电机驱动器,步进的及驱动器根据脉冲的频率驱动电机。电机旋转的同时带动光电编码器同步旋转,光电编码器发出的信号反馈给步进电机驱动器完成整个闭环控制。步进电机驱动器通过光电编码器反馈信号与自身发出的脉冲信号对比,可及时发现步进电机的过冲、丢步等运行错误并自动完成修正。
3.2执行器连接器位置标定
为实现定位至运动范围内的特定位置的功能,需要沿导轨方向在运动范围内为步进电机建立一维坐标系,并为执行器连接器所在的位置标定对应的坐标。标定方法如下:
将执行器连接器向起始位置移动,当起始位置传感器发出信号后,步进电机停止转动。该位置记为起始位置,编码为0。将执行器连接器向终止位置移动,当终止位置传感器发出信号后,步进电机停止转动。该位置记为终止位置,编码为光电编码器从起始位置到终止位置记录的编码数,记为N0。使用1000线光电编码器,则从起始位置运动至距离起始位置1(单位:mm)对应的步进电机脉冲数为:
3.3直线运动系统工作流程
4.总结
通过使用位置传感器和光电编码器实现了执行器连接器运动边界标定,执行器连接器精确定位。在直线滑轨保证直线运动方向精度的基础上,使用滚珠丝杠和步进电机及光电编码器组成的闭环控制系统实现了执行器连接器的高精度移动。此直线运动定位系统不受运动范围限制,运动范围改变仅需对系统坐标系重新标定;在横向和纵向分别布置,亦可实现二维空间的精确定位及移动。 [科]
【参考文献】
[1]陆萍,葛培琪,孟剑锋.机械设计基础.山东:科学技术出版社,2003.
