自动化过程控制对PID控制方法的应用及其参数整定策略
2015-09-22刘晓霞孙康波
刘晓霞,孙康波
(沈阳理工大学装备工程学院,辽宁 沈阳 110000)
1 引言
在工业过程控制中,大于95%的控制回路有PID结构,PID这种控制方法之所以得以广泛使用在于其结构简单,在具体应用过程中已被理解、实现,很多高级控制均将PID控制当作基础。科学设计PID参数能让工艺参数控制的更加平稳,预防液位控制系统抽空、压力控制系统安全阀起跳、温度控制系统过大降低产品质量[1]。同时,在确保生产安全、产品质量的条件下还可起到节约能耗的效果。
2 PID控制方法的应用
PID控制实质上包括PI控制与PD控制两部分,PID控制器主要依照系统误差,借助微分、积分及比例计算所得控制量实施控制,确保自动控制体系在受到干扰情况下也可平稳运行。在连续一段时间内PID控制系统情况如图1所示。
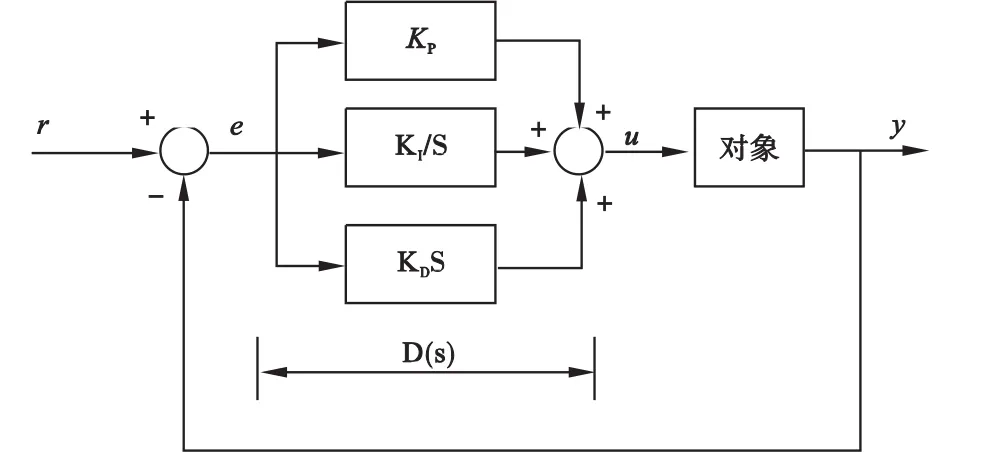
图1 PID控制系统
在具体应用过程中,可依照受控对象的特点、控制功用要求而选用合适的控制组合,形成①比例(P)控制器:u(t)=Kpe(t);②比例+积分(PI)控制器:u(t)③ 比例 +积分 +微分(PID)控制器:
在上述公式中,KP表示比例放大系数,数值为100/P,T1表示积分时间,TD表示微分时间。比例控制可以快速反映误差,进一步缩小稳态误差,但其不能从根本上消除稳态误差。若比例放大系数增大,可导致系统不稳定。积分控制主要作用在于若系统存在误差,积分控制器不断积累,输出控制量,进一步消除误差。故只要时间充足,积分控制会彻底消除误差,促使系统误差变成0,进一步消除稳态误差[2]。若积分作用过于强大将加大系统超调,重则导致系统发生振荡。相比之下,微分控制能够缩小超调量,有效改变振荡,提升系统稳定性能,同时提升系统的动态响应速度,减少调整时间,从整体改善系统动态作用。
2 PID参数整定策略
2.1 衰减曲线方法
这种方法主要通过系统产生衰减振荡进一步整定控制器参数数值的,在闭环控制体系中,需将控制器转变成纯比例功能,将比例度预置为较大数值。当维持稳定以后,用改变给定数值的办法添加阶跃干扰,并认真观察被控制变量记录曲线的衰减比例,从大至小逐渐改变比例程度,直到变成4∶1的衰减比例,记录下此时比例度,即可从曲线上得出衰减周期[3]。参照下表1的经验公式,可得出控制器参数整定数值。(注释:部分过程依照4∶1衰减比例振荡太强,故可依照10∶1衰减曲线方法)。

表1
2.2 临界比例度方法
这种方法依据试验取得临界比例度、临界周期,再凭借经验总结出的关系得出控制器各项参数数值。具体操作步骤:在闭环控制体系中,先把控制器转变成纯比例功能,把积分时间变为无限大,微分时间定为0,在干扰条件下,从大至小一步一步改变控制器比例度,直到系统发生临界振荡,将此时的比例度称作临界比例度,记作δk,临界振荡周期记作Tk,参照表2得出控制器参数整定各项数值。

表2
2.3 经验试凑方法
这种方法是在长时间生产实践过程中形成的整定方法,依照经验先把控制器参数放在一个数值中,然后在闭环控制体系中,促使给定数值发生一定改变而产生干扰,在记录观察所得过渡过程曲线的基础上,将δ、T1、TD对于过渡过程的影响当作指导,依据规定流程,分别整定比例度、积分时间与微分时间,直至达到理想的过渡过程[4,5]。具体整定步骤有两种:①凭借存比例功能实施试凑、若过渡过程保持大体稳定且符合相关要求,通过积分功能消除余差,再添加微分功能提升控制质量,依照此流程仔细观察过渡过程曲线后开始整定;②依照下表中给定范围确定T1,若引入微分功能,则TD定义在(1/3~1/4)T1范围内,再对实施试凑。(注释:温度对象容量滞后很大,当参数受到干扰以后变化速度越来越慢,δ变小,T1增长,通常需加入微分)。

表3
经验试凑方法十分简单,适合用在各种控制体系内,其应用领域十分广泛,但是这种方法主要凭借经验,若缺乏丰富的经验或者过渡过程速度缓慢时,比较浪费时间,可用优选方法,但确保每次参数改变的大小、方向均有一定目的性。需要特别注意的一点:在同一个系统中,不同人用经验试凑法整定,得出的参数数值不同,这是因为每个人对每条曲线的看法存在很大差异,且无一个确切的评定标准,不同的参数进行匹配可能导致过渡过程衰减情形非常相近。
3 参数整定比较
衰减曲线方法对干扰平十分频繁,且记录曲线不规范,时常出现小摆动,加之很难得出准确的衰减比例度、衰减周期,故这种方法很难广泛应用。临界比例度方法不适宜用在临界比例度较小的体系中,由于临界比例度较小,控制器输出情况可能发生较大变化,被调参数极易超出规定范围,对正常生产运行带来一定的影响[6]。临界比例度方法需要确保系统处于等幅度振荡状态,才能得出δk、Tk,针对工艺方面不能形成等幅度振荡的系统,这种方法不适宜用。经验试凑方法在外界干扰功能较频繁,记录曲线不规范的控制体系中应用十分合适。先用存比例实施试凑,若P=15,则提示过渡过程大体稳定且符合相关要求,若将比例控制在合适范围内,则可以进一步消除余差,因是温度控制参数,当加入一定参数后即可取得平稳的控制曲线。因流量对象特征对象的时间参数较小,且参数有一定波动,δ大则T1短,故不必微分。
4 结束语
通过分析PID控制方法的应用,重点介绍了几种PID参数整定策略,提出了行之有效的参数整定方法。当一个制动控制体系投入运营时,必须先整定控制器参数,才可取得理想的控制质量。而在具体生产过程中,若工艺操作条件或者负荷发生较大改变,则被控对象特点也需作出相应改变,并重新整定控制器参数。总之,PID控制是一种简单、有效的过程控制办法,在未来现代工业控制体系中所起的作用必将越来越重要。
[1]胡寿松.自动控制原理[M].北京:科学出版社,2002.
[2]廖常初.PID参数的意义与整定方法[J].自动化应用,2010,6(5):143-145.
[3]徐璟.PID 参数整定分析[J].广西电业,2010,7(4):196 -199.
[4]杜云超.PID过程控制及其参数整定策略浅析[J].化学工程与装备,2010,6(9):152 -155.
[5]王孙安,任华.工业系统的测量、驱动与控制[M].西安:西安交通大学出版社,2003.
[6]牟金善.分数阶PID控制器参数整定研究[D].华东理工大学,2013.
