电力系统暂态稳定性闭环控制(七)
——实现方案与控制效果
2015-09-21张保会王怀远杨松浩
张保会,王怀远,杨松浩
(西安交通大学 电气工程学院,陕西 西安 710049)
0 引言
目前电力系统中的安全稳定紧急控制系统的体系结构一般是由分散测量、执行控制的前置单元和集中决策的控制中心经高速、专用通信网络构成。前置单元是以微机为基础的数字测量、通信及控制装置,控制中心主站以专用计算机网络工作站担任,构成紧急控制系统的网络技术已经成熟。
目前电力系统制定和投入紧急控制策略主要有2种方法。一种方法是大量离线计算大扰动场景,提取特征量,用特征量的组合反映暂态稳定性,对不稳定场景,通过反复试凑计算获得稳定控制方案,将其植入稳定控制系统,称为“稳控策略表”[1-2]。大扰动发生后,根据稳定控制系统实测的特征量组合,查询预植的策略表,判别是否需要执行紧急控制及何种控制方案,简称“离线预决策,实时匹配”;由于电力系统在逐季发展、电网方式不停变化,离线预决策需要考虑的样本量太大,且制定的控制策略难以保证在各种系统方式、运行状态下的有效与经济性。为了适应系统的发展和减少样本的计算量,结合计算手段的进步,尝试采用另一种方法,即大量简化实际系统,根据当前的在线潮流,稳定控制中心根据给定的预想大扰动事故集,进行在线稳定性仿真计算,总结特征量及其组合的门限,制定控制启动决策表,而控制策略表难以自动详细计算匹配,可以离线计算给定几种策略。大扰动发生后根据实时测量的特征量查询事先制定的控制策略表执行控制,称为“在线预决策,实时匹配”[3]。这2种方法都是基于预想的大扰动事故集,稳定性的判别与制定的控制策略取决于实际的扰动与事故集的贴近度,并且依赖于系统模型及参数的仿真计算方法,而系统的模型(特别是负荷模型)和参数(特别是调节器响应参数)是难以精确获得的(系统在不断地发展),因此仿真结果存在可信性问题。
随着相量测量单元(PMU)在各发电厂和变电站的安装和现代通信技术的发展,广域测量系统[4-5](WAMS)在电力系统已经逐步建立,如果系统中每个发电厂都装有相角测量装置(APMU)[6-7],且信息更新周期为10~30 ms,就解决了过去很难获取的状态量(如发电机的功角、角速度、功率等)同步获取问题,而这些状态量又是电力系统暂态稳定性状况最直接的反映和体现,直接使用这些实时测量的状态量对暂态稳定性进行评估与控制,比离线的仿真评估要准确得多。文献[8-15]论述了基于WAMS量测的轨迹信息的电力系统暂态不稳定性判别与控制的原理和技术,本文基于现有的WAMS动态信息系统的条件,给出电力系统暂态稳定性闭环控制系统的实现方案,并在IEEE 39节点系统和三华电网系统进行仿真,验证了本文提出的闭环切机控制系统的有效性和经济性。
1 闭环控制系统构架
根据现有WAMS的硬件条件,基于WAMS的暂态稳定性预测与闭环控制系统采用集中自动决策、分散执行控制模式,其主要硬件模块有前置测量APMU及发电厂控制子站、控制中心主站和高速通信网络,如图1所示。控制主站通过WAMS平台的高速通信网络将前置测量单元测得的同步功率、惯性、角速度和功角数据汇集起来,数据更新周期20 ms,作为大扰动启动后系统不稳定性判别与控制决策的依据。底层为分布在各电厂的控制子站,实时采集本地的功率、角速度和功角,经通信网络上传到控制总站,接受与分配执行主站下达给本发电厂的切机控制命令。
1.1 对发电厂控制子站功能和配置的要求
只有配置了控制子站的发电厂,它的暂态稳定性才能受本闭环控制系统的控制,已有的发电厂都应安装控制子站。新建发电厂投入运行的同时,控制子站同时投入运行。若WAMS提供的机组轨迹信息不健全,由缺省的轨迹信息主导的失稳模式由于不具有可观性,因而这种失稳模式不具有可控性,其他失稳模式的可观性、可控性不受影响,但是失稳判别方法的快速性会有一定影响[14]。发电厂控制子站同步测量本发电厂的各发电机电磁功率、惯性(反映开机方式)、角速度和功角,检测本发电厂附近有无大扰动发生,以20 ms的周期送往控制主站。接受控制主站送来的切机命令,经大扰动检测启动、命令到达,确认切机命令有效后,根据本厂机组出力情况,分配所切的机组。
控制子站的测量、计算、通信和执行控制的任务不重,由目前常用的带有同步时钟的数字式实时控制设备即可完成,也可以由发电厂的APMU功能扩充后担任。

图1 集中式暂态稳定性闭环切机控制系统构架Fig.1 Structural frame of centralized transient stability closed-loop generator-shedding control system
1.2 对广域通信网络的要求
利用高速、可靠达到实用化要求的WAMS通信系统。在当前光纤通信条件下,一般光纤介质的传播时延约为6 μs/km,按网内最远距离1000 km计算,传播延时约为6 ms。现有的WAMS试验测试结果显示:控制中心—控制子站—控制中心的双向通道延迟在10~20 ms之间。本闭环控制方案采用自记忆预测轨迹的方法,可以弥补信息时滞的实时性不足问题,而控制主站一次新时间断面内的计算判别时间可保证在毫秒级,从命令下达到执行完成的时间为100ms。利用WAMS通信系统能满足暂态稳定闭环控制投入切机控制后阻止暂态失稳的快速性要求。
1.3 满足主站计算速度的要求
正常运行时,控制主站逐时(时段长20 ms)读取WAMS实时数据库中的各发电厂状态信息及大扰动检出标志,如果没有大扰动发生,则读取下时段数据。若有大扰动发生,每一个新时段需要完成分群、等值计算、等值轨迹预测、稳定性判别和制定控制措施,因为没有矩阵、迭代等大规模的运算,一般的工作站运算能力可以满足要求。
1.4 与其他控制系统的兼容性
目前的电力系统配备有多种连续、离散的控制系统,例如安全稳定控制系统,有些控制系统在大扰动时也会启动控制。本文提出的基于响应的闭环控制系统,依据电力系统的实时响应信息作出控制决策,已经计及了本闭环控制措施投入前其他控制对电力系统暂态稳定的作用,自适应了其他控制作用,不需要在信息交换、计算条件和硬软件等方面与其他控制系统专门配合。如果控制中心已经具有了实时性好、计算能力强的控制系统平台,将本暂态稳定性闭环控制功能作为高级应用,嵌入在控制系统软件平台中,也可以省略本主站的计算设备。
2 控制主站的软件流程
控制主站暂态稳定性闭环控制功能的软件实现框架,如图2所示,其主要由实时的信息采集模块、大扰动启动和计算复归模块、不稳定性预测模块、闭环控制措施的制定和下达模块4个模块组成。
a.实时的信息采集模块。
控制主站从WAMS实时信息中提取各发电机的动态轨迹信息(发电机功角、转子角速度、功率和惯性时间常数)、大扰动检出标志,经综合判别决定是否转入暂态稳定性判别模块。
b.大扰动启动和计算复归模块。
当系统中发生短路或无故障跳闸时,扰动点附近发电厂的有功出力将会突然下降;而当继电保护装置动作,故障切除时,机组的有功出力会回升。由此,控制中心可以通过收到控制子站送来的大扰动检出信号与监测发电厂功率是否发生突变来启动闭环控制系统。令M为大扰动信号,正常运行时,M=0,当检测到扰动时,置M=1。

图2 控制主站软件流程图Fig.2 Flowchart of master station
闭环控制的目标是保持系统暂态稳定,检测系统功角曲线连续3次摆动的最大摇摆角均逐次递减时,即可复归本次闭环控制计算,监视下次大扰动发生。
c.不稳定性预测模块。
当大扰动发生后,进入不稳定性预测模块。根据WAMS实测数据,预测计算每个发电机的复合功角,用复合功角的间隙分群,按照两群模式对系统进行等值,求得当前两群模式下等值系统的功角、角速度和不平衡功率,联合使用文献[9-10]的方法判别系统的稳定性。
文献[9]基于实测轨迹的判别方法可靠性高,但判别速度稍慢,而文献[10]基于预测轨迹的判别方法判别速度很快,但可靠性依赖于预测轨迹的精度。因此,对系统的不稳定性判别,可以将实测轨迹和预测轨迹相结合起来,当实测轨迹数据判别出系统失稳,或者连续几个数据窗的预测轨迹判别出系统失稳,就发出系统失稳的命令。
d.闭环控制措施的制定和下达模块。
用文献[12]的方法,依据切机时刻的角速度和系统允许的最大摇摆角,计算切机控制所需要的最小切机量。再用文献[13]的方法根据发电机的功角、角速度和惯性信息,剔除切机控制负效应机组,分配实施切机的发电厂与切机量。将切机控制命令快速、可靠地发送到相应的控制子站。
3 控制子站的软件流程
发电厂控制子站是基于APMU同步相量测量功能扩展的装置,具备本发电厂信息的实时测量,实时判别附近是否有大扰动发生,并将测量与大扰动判别结果实时(20 ms周期)上传至控制主站,接收控制主站发来的切机控制命令。控制子站的软件实现框图如图3所示,其主要由信息采集与大扰动判别模块和控制命令确认与执行控制模块2个模块组成,图中L指控制主站的控制命令。

图3 控制子站的软件流程图Fig.3 Flowchart of slave station
a.信息采集与大扰动判别模块。
控制子站周期式(周期20 ms)采集本发电厂的机械输入功率和电磁输出功率、惯性、角速度及功角,并根据本周期输出功率、母线电压等电气量的变化,判别附近有无大扰动发生,将以上信息发送到控制主站。
b.控制命令确认与执行控制模块。
大扰动发生后,控制子站需要接收控制主站发来的切机命令,经本地有扰动的确认,分配、执行本发电厂的切机命令。
一般的发电厂有多台发电机,当前出力大小不同,控制主站发来的切机量需要发电厂子站实时组合机组出力,确定所切机组,对应机组发出跳闸信号。
4 仿真
为验证闭环控制系统的有效性,在IEEE 39节点系统和三华联网系统下进行了仿真验证。闭环控制系统的控制目标有2种:方案1以最小切机量保持系统暂态稳定为控制目标;方案2以最小切机量限定系统的最大摇摆角为控制目标。
4.1 单一故障造成不稳定的闭环控制
4.1.1 IEEE 39 节点系统
故障设置为0 s时线路4-14之间发生三相短路接地故障,在0.21 s保护动作跳开线路。系统不稳定的功角曲线如图4所示。
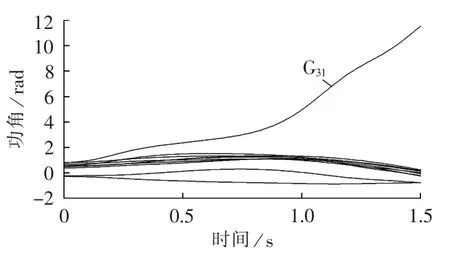
图4 线路4-14发生故障后的不稳定功角图Fig.4 Power angle chart,when line 4-14 has fault
依据本文闭环控制算法得出的中间及最终结果如表1所示。
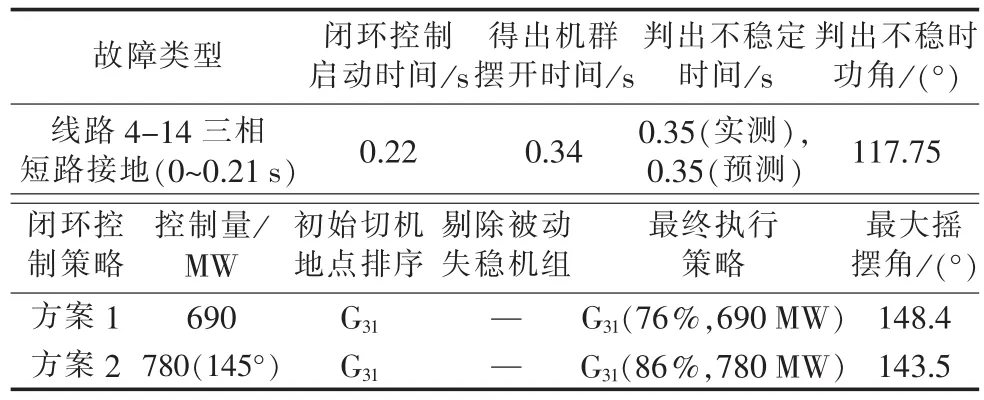
表1 闭环控制运行结果Table 1 Operational results of closed-loop control
发电机G31控制子站收到控制主站发送来的切机命令,本地机组大扰动启动满足,在0.4 s时完成切机,之后的功角曲线图如图5和图6所示。
由仿真结果可以看出,方案1以690 MW的切机量保持了暂态稳定,但其最大摇摆角为148.4°;方案2切机量为780 MW,比方案1多切了90 MW,实施后系统最大摇摆角为143.5°,在所期望的范围内。
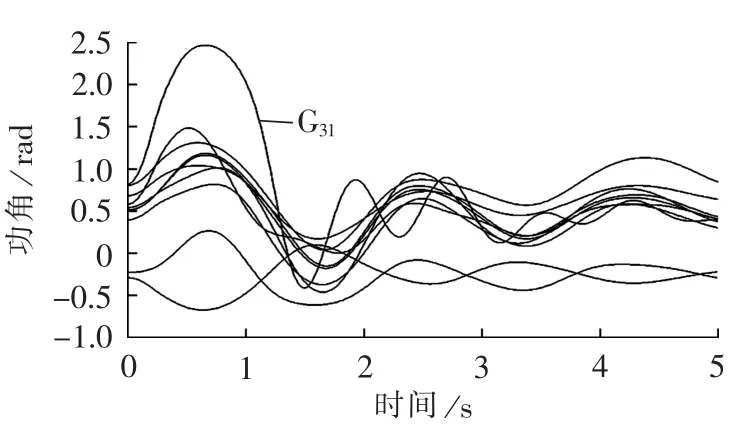
图5 控制方案1实施的功角曲线图Fig.5 Power angle chart of control scheme 1
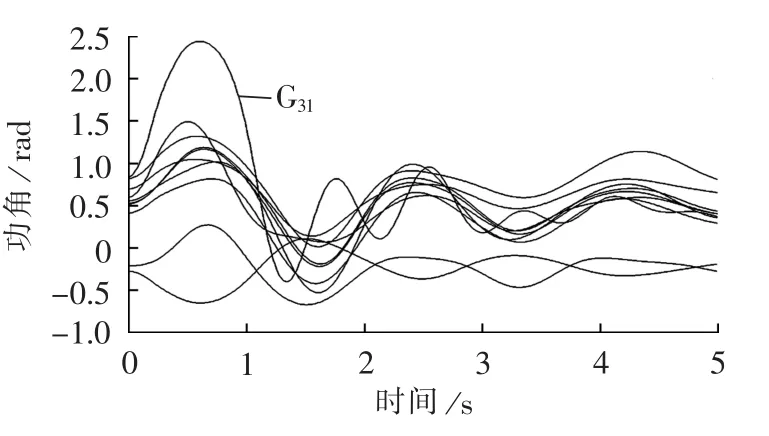
图6 控制方案2实施后的功角曲线图Fig.6 Power angle chart of control scheme 2
4.1.2 三华联网系统
故障设置为0s时洪沟—板桥发生三相接地故障,0.1s跳开双回线路切除故障,其不稳定功角曲线见图7,闭环控制算法得出的中间及最终结果见表2。
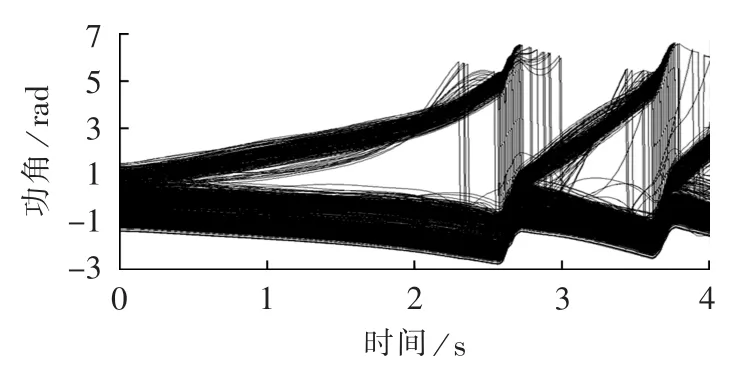
图7 洪沟—板桥三相接地跳开双回线路功角图Fig.7 Power angle chart,when dual-loop line is tripped due to Honggou-Banqiao three-phase grounding fault
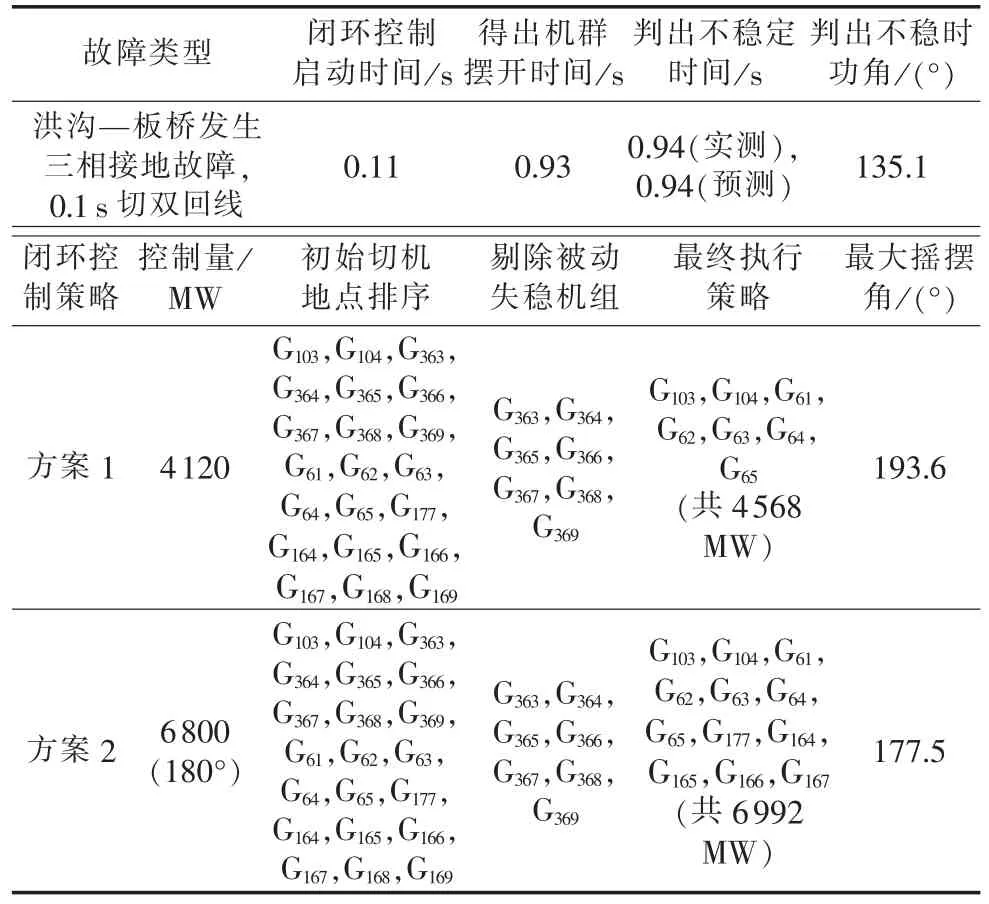
表2 闭环控制运行结果Table 2 Operational results of closed-loop control
经300 ms延时(计算、分配控制量、通信、跳开关等延时),各控制子站在1.24 s完成切机控制,之后的功角曲线图如图8、9所示。

图8 切除4568 MW机组后的功角曲线图Fig.8 Power angle chart,when 4568MW generator is shed

图9 切除6992 MW机组后的功角曲线图Fig.9 Power angle chart,when 6992 MW generator is shed
仿真结果表明,2种方案均能使系统恢复稳定。方案1无需给定最大摇摆角,且切机容量小。方案2实施后,系统的最大摇摆角为177.5°,但切机容量较方案1大2680 MW(65%)。另外,给定的最大摇摆角与控制后实际最大摇摆角误差很小,在所期望的范围内。
4.2 相继故障造成不稳定的闭环控制
IEEE 39节点系统中相继故障设置为0 s时线路5-6之间发生三相永久性短路接地故障,在0.13 s保护动作跳开线路,而在0.7s时线路重合闸,0.83s重合闸失败保护动作跳开线路。系统不稳定的功角曲线图如图10所示。
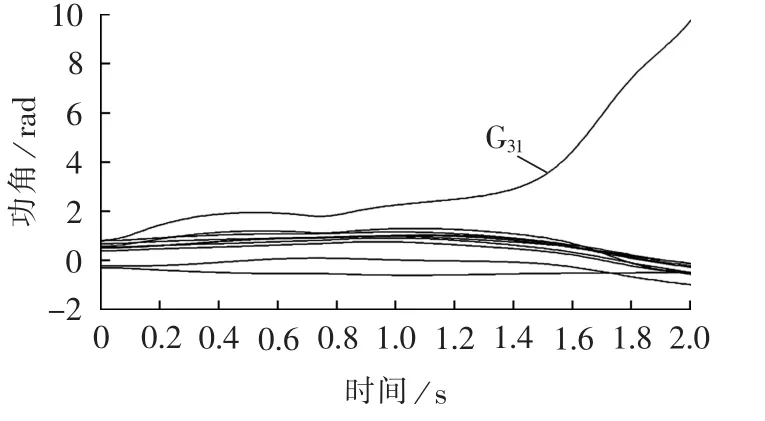
图10 重合闸失败的不稳定功角图Fig.10 Power angle chart,when reclose operation is failed
控制主站在0.84 s再次启动闭环控制系统,闭环控制算法得出的中间及最终结果如表3所示。
发电机G31控制子站收到控制主站发送来的切机命令,本地机组大扰动启动满足,在1 s时完成切机,之后的功角曲线图如图11和图12所示。
由仿真结果可以看出,相继故障条件下闭环控制仍然可以准确判别出系统稳定性,2种控制方案均能使得系统恢复稳定。方案1以680MW的切机量保持了暂态稳定,其最大摇摆角为138.9°;方案2切机量为780MW,比方案1多切了100MW,实施后系统最大摇摆角为138.4°,在所期望的范围内。

表3 闭环控制运行结果Table 3 Operational results of closed-loop control
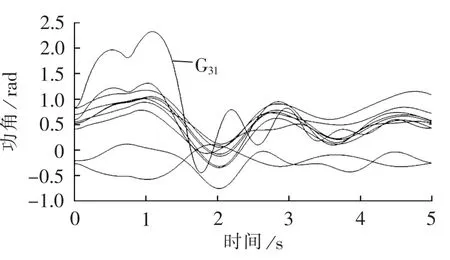
图11 控制方案1实施后的功角曲线图Fig.11 Power angle chart of control scheme 1
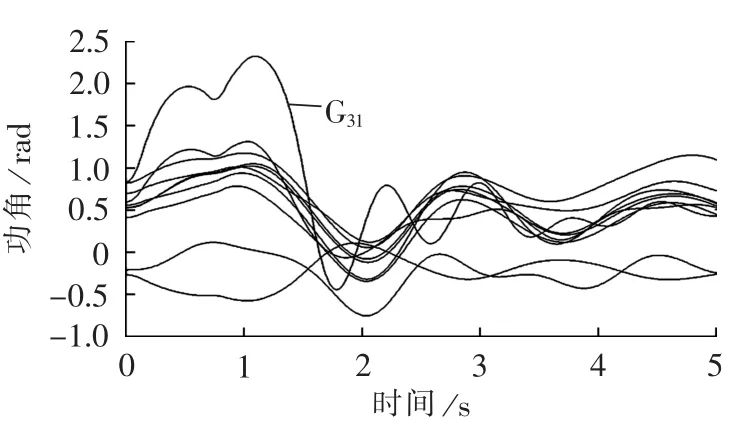
图12 控制方案2实施后的功角曲线图Fig.12 Power angle chart of control scheme 2
4.3 闭环控制系统兼容策略表式控制系统
4.3.1 IEEE 39 节点系统
双重故障设置为母线15和母线16之间线路0 s发生三相短路故障,在0.35s保护动作跳开线路,同时母线21和母线22之间线路0 s发生三相短路故障,在0.2 s保护动作跳开线路。该电力系统除配置了“策略表”式的安全稳定控制切机系统外还配置了本闭环控制系统。策略表没有考虑多重故障,0.4 s安控装置按照策略表切除了发电机G31。由于策略表失配,系统仍然向不稳定发展,系统不稳定的功角曲线图如图13所示,超前失稳机群包含G32—G38这7台机组。
本文闭环控制系统跟踪系统轨迹,0.42s做出不稳定的判别(预测轨迹),给出的闭环控制策略见表4。
各控制子站在0.47s完成切机控制,控制措施完成之后的功角曲线图如图14、15所示。
仿真结果表明,当与策略表相配合时,2种方案均能使得系统恢复稳定。方案2实施后得到的系统最大摇摆角为146.7°,在所期望的范围内。
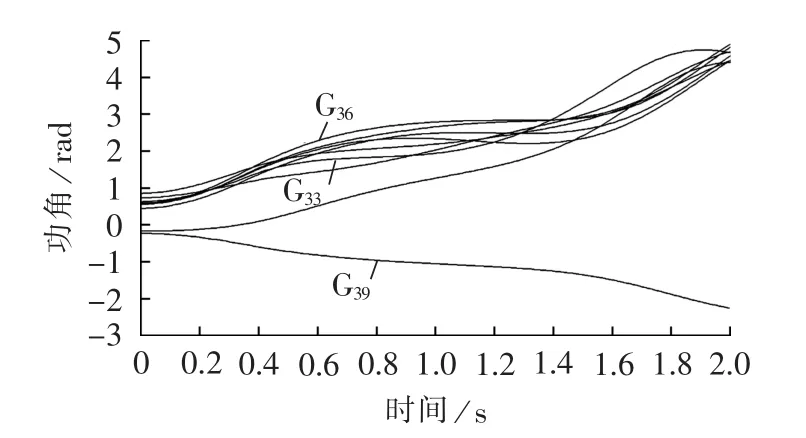
图13 发生多重故障,按照策略表切机后的不稳定功角图Fig.13 Power angle chart,after list-based generator-shedding operation due to multiple faults

表4 闭环控制运行结果Table 4 Operational results of closed-loop control

图14 控制方案1实施后的功角曲线图Fig.14 Power angle chart of control scheme 1
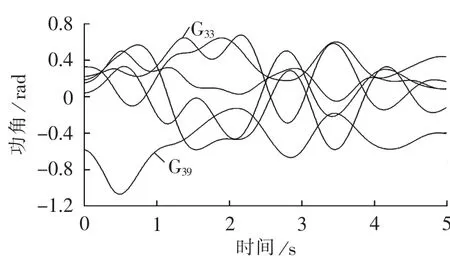
图15 控制方案2实施后的功角曲线图Fig.15 Power angle chart of control scheme 2
4.3.2 三华联网系统
该系统同样配备了策略表式安全稳定控制系统和本闭环控制系统。故障设置为0 s时复奉直流发生双极闭锁,0.1s时策略表式稳控系统切除向家坝5台800 MW的机组,之后的不稳定功角曲线图见图16。
尽管稳控装置进行了快速的切机控制,由于策略表失配,系统仍然向不稳定发展,本闭环控制系统在2.61s做出不稳定的判别,给出的闭环控制策略如表5所示,各控制子站在2.91s完成切机控制,控制措施动作之后的功角曲线图如图17、18所示,系统稳定。
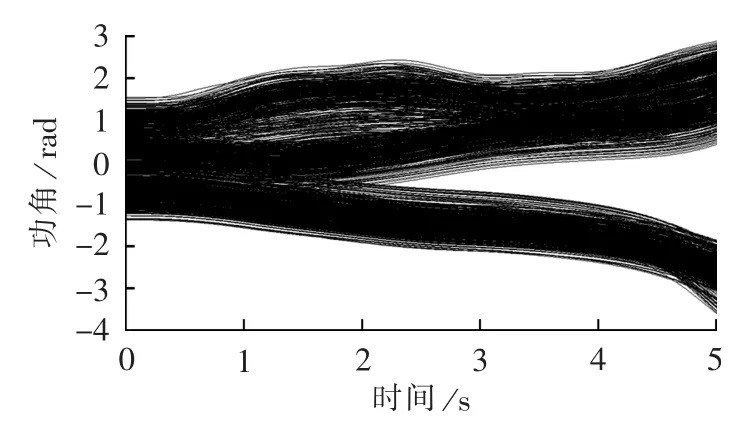
图16 复奉直流发生双极闭锁,0.1s切向家坝5×800 MW机组后的不稳定功角图Fig.16 Power angle chart,after 5×800 MW generators of Xiangjiaba are shed at 0.1 s due to Fu-Feng DC bipole trip

表5 闭环控制运行结果Table 5 Operational results of closed-loop control
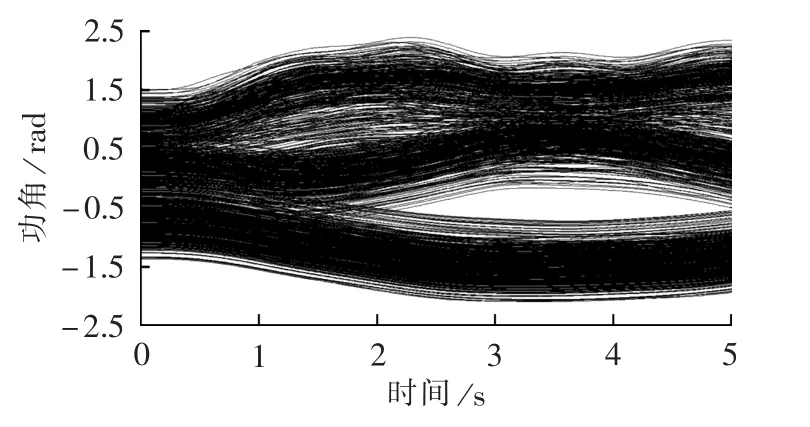
图17 切除3040 MW机组后的功角曲线图Fig.17 Power angle chart,after 3040 MW generator is shed
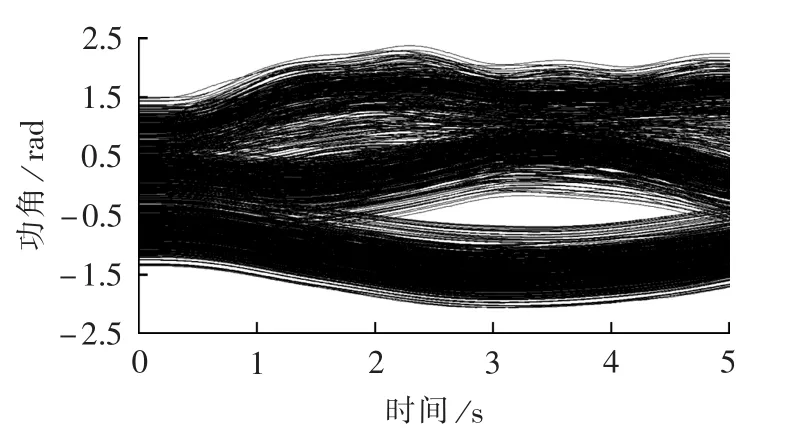
图18 切除3800 MW机组后的功角曲线图Fig.18 Power angle chart,after 3800 MW generator is shed
仿真结果表明,闭环控制系统能够兼容其他控制系统,前期控制并不影响闭环控制的准确性和有效性。
观察控制方案表1—5,系统不失稳允许的最大摇摆角为141.7°至193.6°,变化范围很大,与系统的运行状况和失稳模式有关,在大型电力系统中,保证系统不失稳的最大摇摆角(稳定边界)很难人工准确估计。最大摇摆角允许得越小,相同故障条件下切机量越大,有时还会引发系统低周期继电器切负荷,损失更大。本文的实时估算不稳定平衡点自动计算切机量方案可以经济地阻止系统失稳。
5 结论
基于发电机实时响应相轨迹凹凸性变化的暂态不稳定预测理论与判据,在多机系统中对于不稳定的判别是及时、准确的,保证了启动切机控制的必要性。基于相轨迹斜率大小的切机量计算方法可以正确、快速得到阻止系统失稳需要的最小控制量。按照等值机械功率变小剔除切机控制负效应机组、选择有符号动能与功角乘积较大优先切除的切机量分配方法,保证了闭环切机控制的有效性。基于WAMS通信条件,给出了暂态稳定闭环控制系统的实现方案,该方案经IEEE 39节点系统和三华联网系统的仿真,说明了该系统能够在单一故障、相继故障和多次控制模式下,经闭环控制保证系统暂态不失稳。
