一种模块化机械臂的设计与运动学分析
2015-09-21闫继宏刘玉斌
闫继宏,郭 鑫,刘玉斌,赵 杰
(机器人技术与系统国家重点实验室(哈尔滨工业大学),150001哈尔滨)
传统的机器人大都是应用户的要求,“一个用户,一次重新设计”,产品规格多,零件的通用性差,而且质量和可靠性都不稳定.针对这种情况,美国卡纳基梅隆大学[1-2]、日本东芝公司[3]、德国雄克(SCHUNK)公司[4]、哈尔滨工业大学机器人所[5-7]等开展了模块化机械臂的研究,并取得了一定的成果,但是目前仍存在着机械臂模块体积大、质量重、力矩小等问题.同时,由于模块化机器人可以利用不同模块组装成各种不同的构型,给机械臂的运动学求解带来了很大难度.虽然国内外都开展了相关的研究[8-13],但仍未找到一种通用性强、可靠性高的运动学模块化算法.
本文主要对机械臂结构模块化、控制系统模块化进行了分析和设计,并对能够根据机械臂构型自动进行运动学求解的运动学算法进行了研究,最后以六自由度模块化机械臂为例,对运动学算法进行了求解和仿真验证.
1 机械臂结构模块化设计
1.1 模块化关节设计
机械臂模块化关节是集机械结构、驱动、控制和通信于一体的机电一体化产品,在设计时不仅要考虑模块自身的结构和尺寸,而且要具有良好的通用性和互换性,以便快速组装成不同的构型.
图1为设计的关节模块结构,其电气结构如图2所示.整个关节的模块化结构主要由驱动、传动、反馈控制和走线等部分组成,通过机械结构与电气的模块化设计,实现关节模块在机械与电气两个方面的模块化.

图1 关节模块结构

图2 关节模块电气结构
从图1中可见,模块采用直流伺服电机作为驱动装置,采用谐波和齿轮二级减速的传动方式,利用绝对式光电编码器和扭力盘作为反馈控制装置,通过制动器提供断电保护.整个关节模块结构紧凑,质量轻,输出力矩大.直流电机、编码器、制动器分别通过齿轮套与同一个中心齿轮连接,采用轴线平行的布置方式,使关节模块结构更加紧凑,大大减小了关节尺寸;各个支撑、连接零件采用铝合金进行加工制造,在保证刚度和强度的同时减轻了整个关节的质量;二级减速实现了较大的减速比,使关节输出力矩增大.模块走线通过电机偏置和零件的中空轴来实现,从而解决了电缆缠绕和磨损的问题.
每个关节模块中具有相同的动力和信号连接转接板,动力由24 V直流电源提供,信号传递采用CAN总线串联的方式.驱动器根据绝对编码器和扭力盘反馈的信息对电机和制动器等进行控制.
1.2 连杆模块设计及机械臂构型选择
各关节之间的运动学参数由两者之间的连杆来确定,连杆模块是确定构型的另一重要模块.设计了轴线垂直形式和轴线平行形式的连杆模块用于关节模块之间的连接.另外,为了构型方便,模块之间采用了螺纹快速连接结构.其结构如图3所示.

图3 连杆模块结构
各个关节模块和连杆模块具有相同的机械接口和电气接口,可以根据需要快速组装成不同构型的机械臂以满足用户的需求.末端可以连接不同的夹持或操作机构,如图4所示为利用不同的关节模块和连杆模块组成的不同自由度的机械臂构型.

图4 模块化机械臂构型
2 机械臂运动学模块化分析
设计的关节模块通过不同组合可以形成不同自由度数及构型的机械臂,需要建立统一的模块化运动学.利用魏延辉提出的构形平面匹配的思想[14-15],对所研制的模块化关节组装成的各种构型机械臂的运动学模块化进行了分析,并设计了运动学仿真平台.最后以六自由度模块化机械臂为例对运动学算法进行了求解和仿真验证.
2.1 运动学建模
由于可重构模块化机器人的构型和所选模块的不确定性和多样性,为了能够快速获得其运动学,希望能用相同形式的表达式表示不同的模块.关节模块的主要形式有移动关节模块、回转关节模块和摇摆关节模块,连杆模块有平行式和垂直式.
模块的统一表达方式为

式中:θ为回转模块的回转角度,β为摇摆模块的摇摆角度,β为摇摆模块的连接长度,h为回转模块或连接模块的连接长度,w为移动模块的移动量.
通过基本模块的统一表达方式,在已知模块类型的情况下,即可建立机器人正运动学:

引入构形平面,每个构形平面由若干个摇摆模块、若干个移动模块、若干个连接模块与一个回转模块组成.在无空间蔽障的条件下,一般2个构形平面进行匹配就能够满足机器人工作空间点的位姿要求;某些情况下,需要3个构型平面.经过构形平面的姿态匹配和位置匹配,关节角的求解就转化成了平面内的运动学求解,可根据几何关系求出各关节角的值.
2.2 运动学求解
以其中一种构型的六自由度机械臂(如图5所示)为例来进行运动学的求解.
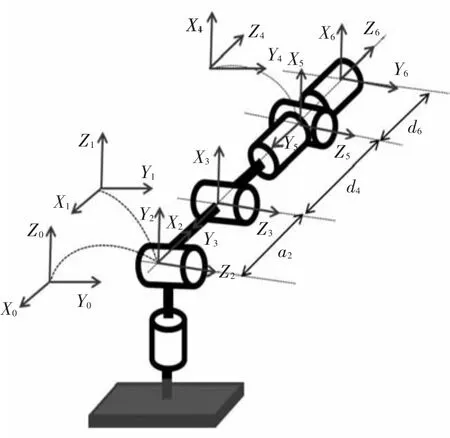
图5 六自由度模块化机械臂
该机械臂构型由3个回转模块和3个摇摆模块组成,将各个模块的参数代入式(1)得到各个模块的数学模型,将其代入式(2)可得机械臂的正运动学:

其中:


逆运动学求解,已知机械臂末端位姿矩阵为

首先对机械臂进行构形平面姿态匹配,该构型的机械臂最多由两个构形平面组成,设

则姿态匹配矩阵为

式中:θ1是关节1的回转角度;θ'是构形平面一回转关节的回转角度,即关节4的回转角度;β1+β2是构形平面1上各个摇摆关节的摇摆角度之和,即关节2和关节3回转角度之和;θ″是构形平面2回转关节的回转角度,即关节6的回转角度;β3是构形平面2上各个摇摆关节的摇摆角度之和,即关节5的回转角度.经过构形平面姿态匹配可以求出θ1、(θ2+θ3)、θ4、θ5和θ6.
然后进行构形平面位置匹配,关键是确定构形平面一匹配点的空间坐标值,在经过构形平面的姿态匹配和位置匹配后,关节角的求解就转化成了平面内的运动学求解,根据几何关系求出关节角θ2和θ3的值,从而完成逆运动学求解.
2.3 运动学仿真与验证
根据所设计的机械臂关节模块和连杆模块,基于MFC框架类和Open Inventor图形库,在VC++6.0开发平台上开发一套适用于这种构型的三维仿真工具,如图6所示.用户可以按照需要从已有的模块库中选取所需的关节模块和连杆模块,以任意的连接顺序组装成不同自由度、不同构型的机械臂,并能快速获得所组成的机械臂的正、逆运动学,以验证对机械臂运动学模块化建模以及正、逆运动学分析的正确性.

图6 模块化机械臂运动学仿真界面
以图5所示构型的六自由度机械臂为例,给各个关节角以特殊的角度,利用所设计仿真工具得到机械臂末端的位置和姿态,根据实际机械臂的位姿判断正运动学的正确性,结果如表1所示.通过验证,正运动学解法是正确的.随机给出机械臂末端的位置和姿态,利用所设计的仿真工具进行逆运动学求解,求得各个关节角的角度,再将这些角度代入正运动学得出末端位姿,与给出的位姿进行对比以验证逆运动学解法的正确性,结果如表2所示,通过验证,逆运动学解法是正确的.

表1 运动学正解验证数据

表2 运动学逆解验证数据
3 模块化机械臂控制系统设计
由设计的关节模块组成的机械臂的控制系统结构方案如图7所示,采用基于工业以太网的开放式分布控制系统,主要由上位机、下位机、控制器、驱动器等组成,从上位机、主控计算机、运动控制器三层次控制机器人,各部分独立运行,能够适应各种模块组成构型的机械臂控制.
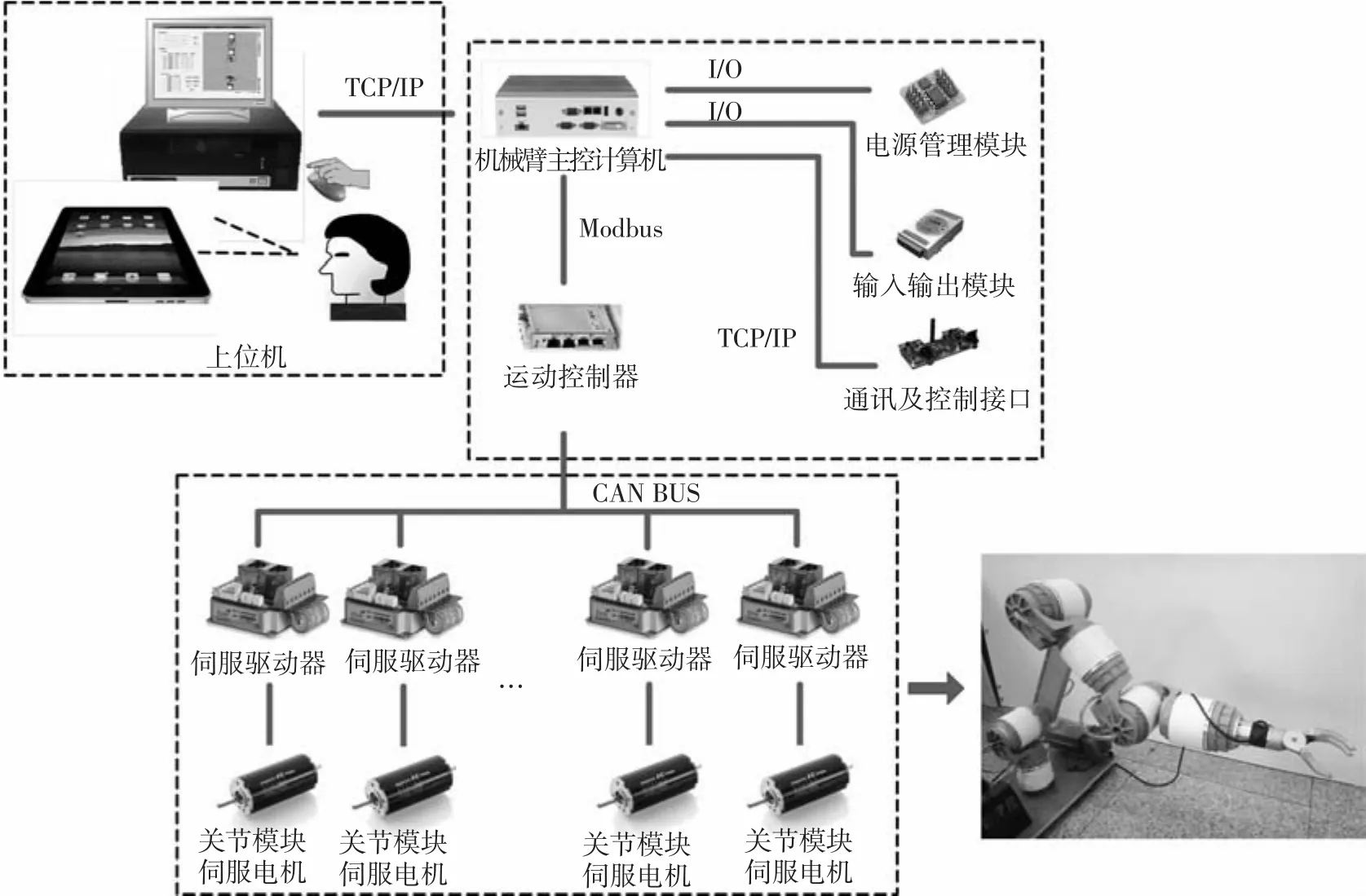
图7 控制系统结构
上位机为操作者提供人机接口,根据环境和操作者的命令进行任务规划,通过人机交互界面向下位机发送控制指令,并在线监控系统的运行情况.下位机负责将上位机的控制指令进行解析,经过运动学解算等将控制指令发送给控制器.控制器负责将从下位机接收到的控制指令发送给驱动模块,并对反馈模块的输入信号进行实时采集和处理.驱动器获得控制模块的指令,对执行机构进行驱动.
用户通过鼠标、键盘等操控上位机人机交互控制软件,产生机械臂的控制命令,通过TCP/IP协议发送给主控计算机(下位机),主控计算机接收指令并根据力矩传感器反馈的信息,经运动学、力控制算法处理后生成控制命令,通过Modbus协议向控制器发送,控制器接收下位机指令控制电机运动,同时检测编码器的位置速度信息,并将电机的状态反馈给下位机,从而实现整个系统的运动控制.
4 结 论
1)研制的新型机械臂关节模块具有结构紧凑、体积小、重量轻、通用性好等特点,各个模块具有相同的结构,能够快速组装成不同构型的机械臂.
2)采用构形平面思想对通用的模块化运动学解法进行分析,并设计了模块化运动学仿真平台,以6自由度构型机械臂为例,验证了运动学解法的可行性和正确性.
3)结合模块化机械臂的特点,基于工业以太网建立开放式分布控制系统,从上位机、主控计算机、运动控制器三层次控制机器人,能够适应各种构型的机械臂控制.
[1]PAREDIS C J J,BENJAMIN B H,KHOSLA P K.A rapidly deployable manipulator system[J].Robotics and Autonomous Systems,1997,21(3):289-304.
[2]SCHMITZ D,KHOSLA P,KANADE T.The CMU reconfigurable modularmanipulatorsystem[C]//Proceedings of the International Symposium and Exposition on Robots.Piscataway:IEEE,1988:473-488.
[3]MATSUMARU T.Design and control of the modular robot system:TOMMS[C]//Proceedings of IEEE International Conference on Robotics and Automation.Piscataway:IEEE,1995:2125-2131.
[4]BAYRHAMMER E,KENNEL M,SCHMUCKER U,et al.Viro-Con:efficient deployment of modular robots[C]//Joint 41st International Symposium on Robotics and 6th German Conference on Robotics.Munich:VDE Conference Department,2010:759-764.
[5]魏延辉,朱延和,赵杰,等.基于柔性化工作的可重构机器人系统设计[J].吉林大学学报,2008,38(2):
449-453.
[6]赵杰,魏延辉,蔡鹤皋.新型可重构机器人分布式控制方法的研究[J].哈尔滨工业大学学报,2008,
40(1):39-42.
[7]崔馨丹,朱延河,王晓露,等.模块化机器人的双输出CPG网络调相运动控制[J].哈尔滨工业大学学报,2013,45(7):47-52.
[8]LIU Xinjun,Chen Xiang,LI Zhidong.Modular design of typical rigid links in parallel kinematic machines:Classification and topology optimization[J].Frontiers of Mechanical Engineering,2012,7(2):199-209.
[9]CHEN I M,GAO Yan.Closed-form inverse kinematics solver for reconfigurable robots[C]//Proceedings of the 2001 IEEE International Conference on Robotics&Automation.Seoul:IEEE,2001:2395-2400.
[10]PAN Xinan,WANG Hongguang,JIANG Yong,et al.Research on kinematics of modular reconfigurable robots[C]//2011 IEEE International Conference on Cyber Technology in Automation,Control,and Intelligent Systems.Piscataway:IEEE,2011:91-96.
[11]TEJOMURTULA S,KAK S.Inverse kinematics in robotics using neural networks[J]. Information Sciences,1999,116(2):147-164.
[12]CHAPELLE F,BIDAUD P.Closed form solutions for inverse kinematics approximation of general 6R manipulators[J].Mechanism and Machine Theory,2004,39(3):323-338.
[13]吴文强,管贻生,朱海飞,等.面向任务的可重构模块化机器人构型设计[J].哈尔滨工业大学学报,2014,
46(3):93-98.
[14]WEI Yanhui,ZHAO Jie,ZHU Yanhe,et al.Inverse kinematic research based on a new type of reconfigurable robot[J].西安电子科技大学学报,2008,35(1):175-182.
[15]魏延辉,赵杰,高延滨,等.一种可重构机器人运动学求解方法[J].哈尔滨工业大学学报,2010,42(1):
133-137.
