基于STM32F407的弯管机控制器设计
2015-08-17秦怀宇田讨论江苏科技大学电气与信息工程学院张家港215600
秦怀宇,田讨论(江苏科技大学电气与信息工程学院,张家港,215600)
基于STM32F407的弯管机控制器设计
秦怀宇,田讨论
(江苏科技大学电气与信息工程学院,张家港,215600)
PLC控制的弯管机价格昂贵,利用率低,竞争力不强。本文利用最新的以ARM Cortex-M4为内核的微控制器STM32F407为控制核心,针对采用绕弯弯管工艺的弯管机,开发弯管机控制器。设计了控制器的软硬件系统,并进行功能性测试,取得预期效果。
微控制器;弯管机;直流伺服电机
0 绪论
随着现代工业的快速发展,汽车制造业、航空航天工业、石油化工行业及其他行业对弯管件的需求日益增加,并且对弯管件的精度要求也越来越高,传统的手工加工及低精度的机械加工已经无法满足这种要求。在这种情况下,数控弯管机应运而生。数控弯管机加工精度高,使用方便,效率较高。现代数控弯管机多采用PLC作为控制核心,PLC具有适应性强、抗干扰能力强、使用方便的优点,但同时,PLC价格昂贵,利用率低,造成了一定的资源浪费。Cortex-M4内核处理器成本低、功耗低,且结合32位控制技术与数字信号处理技术的优点,适合于弯管机控制器的设计。
本文采用微控制器STM32F407最小系统设计弯管机控制器。
1 系统设计
本系统由STM32F407最小系统,USB口转串口模块,L298N芯片构成的H桥驱动模块,直流伺服电机,电机制动电路及上位机软件组成。STM32F407是弯管机控制器的核心单元,完成从USB转串口模块读取由上位机发出的指令并执行相应动作,接收伺服电机的编码器发出的位置信号,通过H桥驱动模块驱动直流伺服电机的功能。其系统框图如图1所示。

图1 系统总体设计框图
1.1系统硬件设计
本文采用ST官方推出的入门级开发板STM32F4-Discovery,板载芯片为STM32F407VGT6,板上包括了一个ST-LINK/V2 调试工具和2 个ST MEMS、USB OTG接口等。其供电电路如图2所示。STM32F407的供电范围在1.8v到3.6v,其典型值为3.3v。
电机选用日本多摩川精机株式会社生产的TS3738N4E11直流伺服电机,其驱动模块采用L298N。L298N工作时能够承受较高的电压,工作电压最高时可以达到46V;同时,也具有较大的输出电流,稳定工作时电流可达2A,瞬间输出电流可达3A;额定功率达到25w。L298N内部拥有两个H桥全桥电机驱动电路,能够驱动直流电机和步进电机以及继电器线圈等感性负载;L298N利用标准逻辑电平控制。一片L298N具有两个使能端,当使能端为低电平时,输出端输出低电平,电机停转。
L298N电机驱动模块原理图如图3所示:
1.2系统软件设计
本设计软件系统的框架由上位机和下位机两部分组成,如图4所示:

图4 弯管机控制器软件系统框架
上位机软件主要负责人机界面显示,及向下位机发送指令:上位机通过串口读取下位机发送的控制器状态,同时可以向下机发送由用户编辑的指令。串口通讯由微软提供的MSComm控件完成,使用简单可靠。下位机软件由串口通讯程序、电机制动程序、直流伺服电机驱动程序及相应的中断服务程序构成。图5为上位机串口通信程序流程图。
下位机程序包括串口通信程序,PWM波产生程序,定时器编码器接口程序,延时程序和相应的中断服务程序。首先,程序完成系统的初始化,如NVIC中断控制系统,RCC外设时钟,定时器,GPIO的初始化等。完成系统的初始化后,微控制器不断检测串口接收状态变量接收结束标志位(此变量为在中断服务文件中定义的无符号字符型全局变量,在接收完成时,将接收结束标志位置1),在该位为1时,通过接收字符的长度,判断并得到电机控制量和电机参数,并启动电机转动。其流程图如图6所示:

图5 上位机串口通信程序流程图
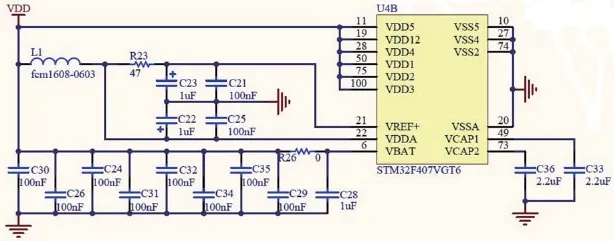
图2 STM32F407供电电路

图3 L298N电机驱动模块原理图

图6 下位机程序流程图
2 测试
弯管机控制器涉及硬件较多,调试时需要按照相关要求。首先,要给系统供电。连接好系统后,将H桥电机驱动模块电源电压调为7伏,继电器供电电压为12伏。系统采用上海稳压电源厂生产的WY-301S型稳压直流电源。该直流稳压电源提供两路独立的直流电源,分别为H桥电机驱动模块和12V电磁继电器供电。直流伺服电机在不同的电压下,转速不同。电压越大,转速越快,转子惯性也越大。当H桥电机驱动模块供电电压为7伏时,电机转速较为合适,能够及时制动。
在控制指令编辑区输入指令后,点击运行按钮前,需要在菜单栏设置选项中,设置A轴电机的参数,即A轴电机每转动一周工作台移动距离。如果此参数没有设置,下位机将无法执行弯管操作。这时,下位机会每间隔1S向上位机发送字符‘E’,显示系统出错。上位机在接收到‘E’字符后,会发出警报,并显示提示信息。如图7所示。复位系统后,设置好电机参数,点击运行按钮,电机就会在微控制器的控制下,按照指令,完成相应动作。如图8所示
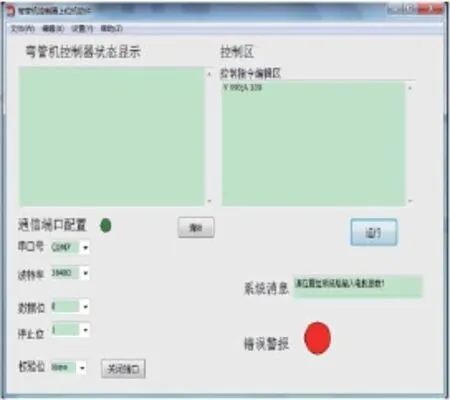
图7 错误警报

图8 系统正常运行
3 结语
本设计虽然完成弯管机最基本的三个弯管动作,但仍存在以下问题:
(1) 直流伺服电机在断电后,由于惯性,并不是断电立即停止。因此,导致由上位机发出的指令和实际运行的结果存在较大误差。在增加短路制动电路和降低电机转速的情况下,仍有些许误差。在后续的研究和开发中,可以考虑在停转前,逐步降低电机转速,以提高控制精度。
(2) 微控制器在不带隔离电路的情况下,稳定性远不如PLC,考虑到弯管机工作环境的多变和电气环境的复杂性,弯管机控制器必须具有高度的稳定性。在下一步的工作中,需要研究如何提高控制器的稳定性。
(3) 完成的弯管动作太少,而数控弯管机则非常复杂。在后续的工作中,需要增加控制器的弯管动作。
[1] 蒙博宇. STM32自学笔记[M].北京:北京航空航天出版社,2012.
[2] 黄智伟,王兵,朱卫华. STM32微控制器应用设计与实践[M],北京:北京航空航天大学出版社,2012
[4] 崔风波.伺服技术的应用与发展趋势.伺服控制,2007(4):5.9
[5] 王健.现代交流伺服系统技术和市场发展综述.伺服控制,2007(1):16.21
[6] 华 清 远 见 嵌 入 式 培 训 中 心 .Cortex 系 列 ARM 内 核 介 绍 [EB/OL].http://www.hqyj.com,2009
The Design of Bending Machine Controller based on STM32F407
Qin Huaiyu,Tian Taolun
(Jiangsu University of Science and Technology,School of Electro and Information,Zhangjiagang,215600)
Bending Machine Controller based on PLC is expensive,ineffective and lack of challenge.Using the latest ARM Cortex-M4 core microcontroller STM32F407 as the control center, developing bending machine controller,play to the advantages of the micro-controller,easy to use and flexible,perform similar functions under the premise of saving production costs.The system are designed,tested and approved well.
micro controller;bending machine;DC servo motor
2014-8-28
